 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Task and Motion Planning for Safe Legged Navigation in Partially Observable Environments
Paper and Code
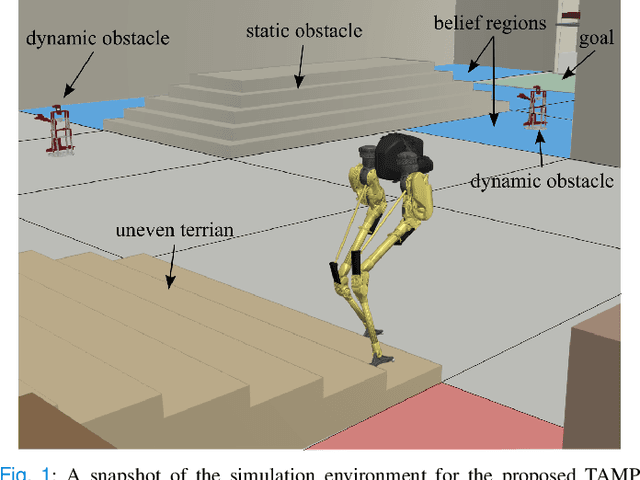
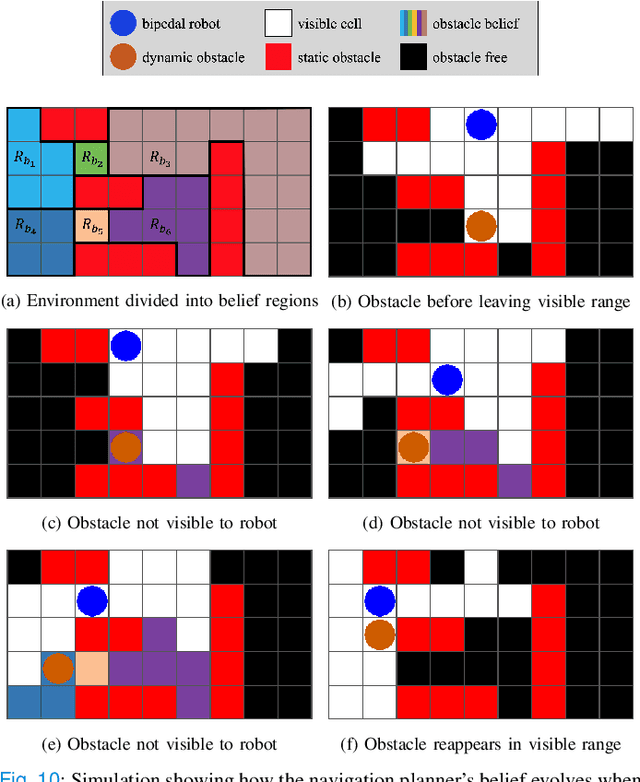
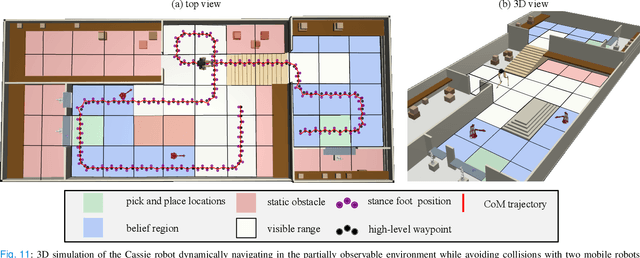
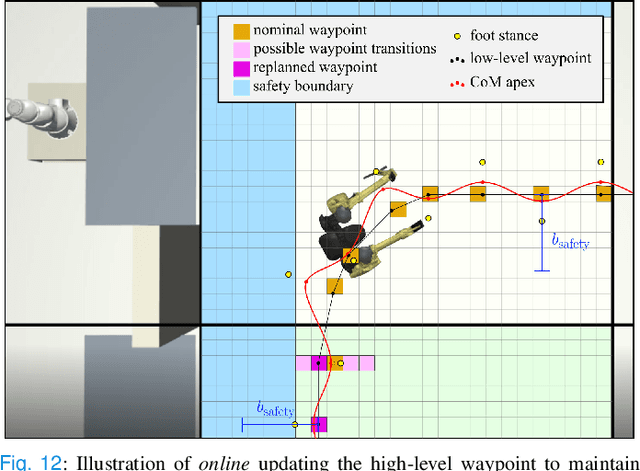
This study proposes a hierarchically integrated framework for safe task and motion planning (TAMP) of bipedal locomotion in a partially observable environment with dynamic obstacles and uneven terrain. The high-level task planner employs linear temporal logic (LTL) for a reactive game synthesis between the robot and its environment and provides a formal guarantee on navigation safety and task completion. To address environmental partial observability, a belief abstraction is employed at the high-level navigation planner to estimate the dynamic obstacles' location when they are out of the robot's local field of view. Accordingly, a synthesized action planner sends a set of locomotion actions including walking step, step height, and heading angle change, to the middle-level motion planner, while incorporating safe locomotion specifications extracted from safety theorems based on a reduced-order model (ROM) of the locomotion process. The motion planner employs the ROM to design safety criteria and a sampling algorithm to generate non-periodic motion plans that accurately track high-level actions. To address external perturbations, this study also investigates safe sequential composition of the keyframe locomotion state and achieves robust transitions against external perturbations through reachability analysis. A set of ROM-based hyperparameters are finally interpolated to design whole-body locomotion gaits generated by trajectory optimization and validate the viable deployment of the ROM-based TAMP to the full-body trajectory generation for a 20-degrees-of-freedom Cassie bipedal robot designed by Agility Robotics. The proposed framework is validated by a set of scenarios in uneven, partially observable environments with dynamical obstacles.