 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEED-SET: Scalable Evolving Experimental Design for System-level Ethical Testing
Mar 02, 2026As autonomous systems such as drones, become increasingly deployed in high-stakes, human-centric domains, it is critical to evaluate the ethical alignment since failure to do so imposes imminent danger to human lives, and long term bias in decision-making. Automated ethical benchmarking of these systems is understudied due to the lack of ubiquitous, well-defined metrics for evaluation, and stakeholder-specific subjectivity, which cannot be modeled analytically. To address these challenges, we propose SEED-SET, a Bayesian experimental design framework that incorporates domain-specific objective evaluations, and subjective value judgments from stakeholders. SEED-SET models both evaluation types separately with hierarchical Gaussian Processes, and uses a novel acquisition strategy to propose interesting test candidates based on learnt qualitative preferences and objectives that align with the stakeholder preferences. We validate our approach for ethical benchmarking of autonomous agents on two applications and find our method to perform the best. Our method provides an interpretable and efficient trade-off between exploration and exploitation, by generating up to $2\times$ optimal test candidates compared to baselines, with $1.25\times$ improvement in coverage of high dimensional search spaces.
Curiosity is Knowledge: Self-Consistent Learning and No-Regret Optimization with Active Inference
Feb 05, 2026Active inference (AIF) unifies exploration and exploitation by minimizing the Expected Free Energy (EFE), balancing epistemic value (information gain) and pragmatic value (task performance) through a curiosity coefficient. Yet it has been unclear when this balance yields both coherent learning and efficient decision-making: insufficient curiosity can drive myopic exploitation and prevent uncertainty resolution, while excessive curiosity can induce unnecessary exploration and regret. We establish the first theoretical guarantee for EFE-minimizing agents, showing that a single requirement--sufficient curiosity--simultaneously ensures self-consistent learning (Bayesian posterior consistency) and no-regret optimization (bounded cumulative regret). Our analysis characterizes how this mechanism depends on initial uncertainty, identifiability, and objective alignment, thereby connecting AIF to classical Bayesian experimental design and Bayesian optimization within one theoretical framework. We further translate these theories into practical design guidelines for tuning the epistemic-pragmatic trade-off in hybrid learning-optimization problems, validated through real-world experiments.
Pragmatic Curiosity: A Hybrid Learning-Optimization Paradigm via Active Inference
Feb 05, 2026Many engineering and scientific workflows depend on expensive black-box evaluations, requiring decision-making that simultaneously improves performance and reduces uncertainty. Bayesian optimization (BO) and Bayesian experimental design (BED) offer powerful yet largely separate treatments of goal-seeking and information-seeking, providing limited guidance for hybrid settings where learning and optimization are intrinsically coupled. We propose "pragmatic curiosity," a hybrid learning-optimization paradigm derived from active inference, in which actions are selected by minimizing the expected free energy--a single objective that couples pragmatic utility with epistemic information gain. We demonstrate the practical effectiveness and flexibility of pragmatic curiosity on various real-world hybrid tasks, including constrained system identification, targeted active search, and composite optimization with unknown preferences. Across these benchmarks, pragmatic curiosity consistently outperforms strong BO-type and BED-type baselines, delivering higher estimation accuracy, better critical-region coverage, and improved final solution quality.
Trust-Preserved Human-Robot Shared Autonomy enabled by Bayesian Relational Event Modeling
Nov 03, 2023



Shared autonomy functions as a flexible framework that empowers robots to operate across a spectrum of autonomy levels, allowing for efficient task execution with minimal human oversight. However, humans might be intimidated by the autonomous decision-making capabilities of robots due to perceived risks and a lack of trust. This paper proposed a trust-preserved shared autonomy strategy that grants robots to seamlessly adjust their autonomy level, striving to optimize team performance and enhance their acceptance among human collaborators. By enhancing the Relational Event Modeling framework with Bayesian learning techniques, this paper enables dynamic inference of human trust based solely on time-stamped relational events within human-robot teams. Adopting a longitudinal perspective on trust development and calibration in human-robot teams, the proposed shared autonomy strategy warrants robots to preserve human trust by not only passively adapting to it but also actively participating in trust repair when violations occur. We validate the effectiveness of the proposed approach through a user study on human-robot collaborative search and rescue scenarios. The objective and subjective evaluations demonstrate its merits over teleoperation on both task execution and user acceptability.
Towards Safe Locomotion Navigation in Partially Observable Environments with Uneven Terrain
Sep 10, 2020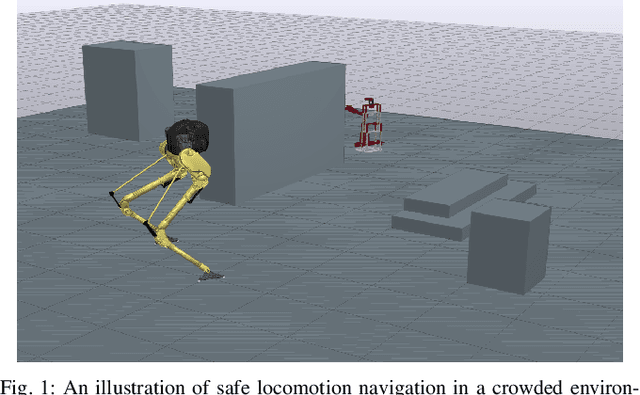
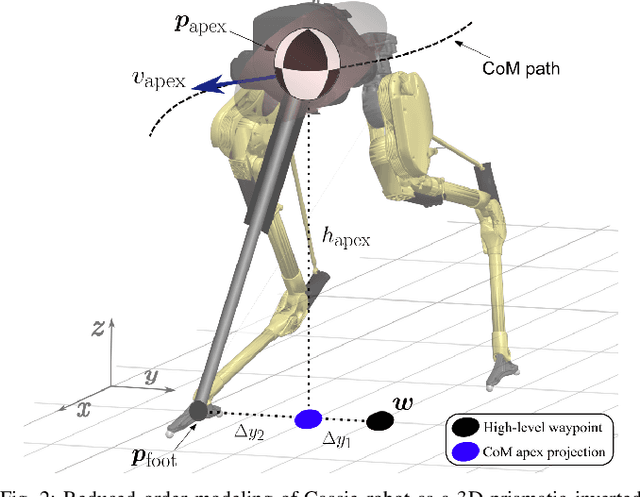
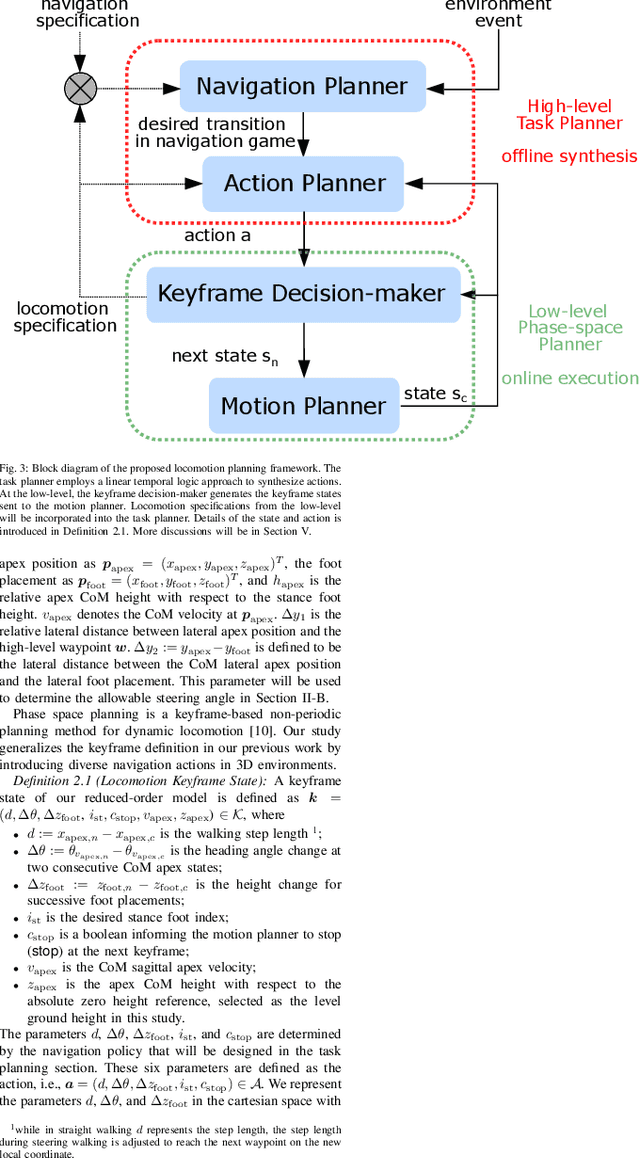
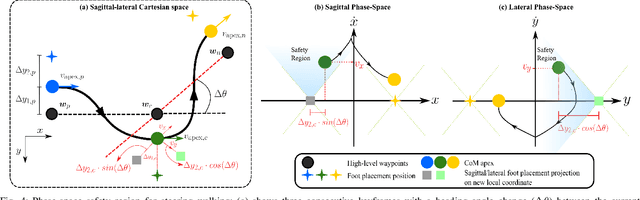
This study proposes an integrated task and motion planning method for dynamic locomotion in partially observable environments with multi-level safety guarantees. This layered planning framework is composed of a high-level symbolic task planner and a low-level phase-space motion planner. A belief abstraction at the task planning level enables belief estimation of dynamic obstacle locations and guarantees navigation safety with collision avoidance. The high-level task planner, i.e., a two-level navigation planner, employs linear temporal logic for a reactive game synthesis between the robot and its environment while incorporating low-level safe keyframe policies into formal task specification design. The synthesized task planner commands a series of locomotion actions including walking step length, step height, and heading angle changes, to the underlying keyframe decision-maker, which further determines the robot center-of-mass apex velocity keyframe. The low-level phase-space planner uses a reduced-order locomotion model to generate non-periodic trajectories meeting balancing safety criteria for straight and steering walking. These criteria are characterized by constraints on locomotion keyframe states, and are used to define keyframe transition policies via viability kernels. Simulation results of a Cassie bipedal robot designed by Agility Robotics demonstrate locomotion maneuvering in a three-dimensional, partially observable environment consisting of dynamic obstacles and uneven terrain.