 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExact, Efficient, and Safe Occlusion-Aware Planning Using AH-Polyhedrons
Jun 13, 2026Safely handling occlusions is a fundamental challenge for autonomous mobile robots operating in dynamic environments. This issue is especially prominent in autonomous valet parking (AVP), where traffic rules are lax, occlusions are frequent and cluttered, and overly conservative behavior can leave vehicles stuck. However, existing methods either lack formal safety guarantees, assume agents follow road structures, or introduce conservatism, leaving occlusion-aware planning for AVP an open challenge. In this paper, we propose APRO (AH-Polyhedron Reachability for Occlusions), an exact and efficient occlusion-aware planning framework based on game-theoretic active perception and AH-polyhedron reachability analysis with AVP as our canonical use case. Our key insight is to reformulate set-based safety conditions in prior work as unions of AH-polyhedrons, enabling exact safety verification through linear programming (LP) without any additional conservatism in set computations or assumptions on road topology. We further show how the resulting safety conditions can be integrated into optimization-based planners or a bisection search scheme for real-time applications. We validate our method in simulation and hardware experiments, including data replay on a real-world parking lot dataset. Experimental results demonstrate that our method consistently achieved a 100% safety rate across all evaluated scenarios while maintaining real-time performance, resulting in safer and more optimal decisions than existing methods with formal safety guarantees.
Make Your VLA More Robust Without More Data By Interleaving Motion Planning
May 31, 2026Vision-Language-Action (VLA) models have shown remarkable progress for mobile manipulation, but their performance on long-horizon tasks remains poor. These tasks are especially challenging because (1) progress toward high-level goals must be maintained across extended sequences of spatially distributed subtasks, and (2) early execution errors compound rapidly over the task horizon. These challenges persist despite finetuning on large human teleoperated mobile manipulation data, indicating that more data alone may not resolve the problem. To address these challenges, we propose MPVI: Motion Planner / VLA Interleaving, a framework that integrates model-based motion planning with VLAs to improve robustness without further training. The proposed integration enables localization and navigation to distant or occluded target objects through cluttered scenes using open-vocabulary object detection, frontier exploration and motion planning. However, such integration is non-trivial, requiring reliable switching between modules; we show one way forward via VLM-based completion checking with proprioceptive triggers. We evaluate our approach on the BEHAVIOR-1K benchmark and demonstrate 113% improvement in task progress over a top end-to-end VLA baseline. Additional details are available at the project page: https://mpvi.netlify.app/.
RTD-RAX: Fast, Safe Trajectory Planning for Systems under Unknown Disturbances
Mar 23, 2026Reachability-based Trajectory Design (RTD) is a provably safe, real-time trajectory planning framework that combines offline reachable-set computation with online trajectory optimization. However, standard RTD implementations suffer from two key limitations: conservatism induced by worst-case reachable-set overapproximations, and an inability to account for real-time disturbances during execution. This paper presents RTD-RAX, a runtime-assurance extension of RTD that utilizes a non-conservative RTD formulation to rapidly generate goal-directed candidate trajectories, and utilizes mixed monotone reachability for fast, disturbance-aware online safety certification. When proposed trajectories fail safety certification under real-time uncertainty, a repair procedure finds nearby safe trajectories that preserve progress toward the goal while guaranteeing safety under real-time disturbances.
Selecting Spots by Explicitly Predicting Intention from Motion History Improves Performance in Autonomous Parking
Mar 05, 2026In many applications of social navigation, existing works have shown that predicting and reasoning about human intentions can help robotic agents make safer and more socially acceptable decisions. In this work, we study this problem for autonomous valet parking (AVP), where an autonomous vehicle ego agent must drop off its passengers, explore the parking lot, find a parking spot, negotiate for the spot with other vehicles, and park in the spot without human supervision. Specifically, we propose an AVP pipeline that selects parking spots by explicitly predicting where other agents are going to park from their motion history using learned models and probabilistic belief maps. To test this pipeline, we build a simulation environment with reactive agents and realistic modeling assumptions on the ego agent, such as occlusion-aware observations, and imperfect trajectory prediction. Simulation experiments show that our proposed method outperforms existing works that infer intentions from future predicted motion or embed them implicitly in end-to-end models, yielding better results in prediction accuracy, social acceptance, and task completion. Our key insight is that, in parking, where driving regulations are more lax, explicit intention prediction is crucial for reasoning about diverse and ambiguous long-term goals, which cannot be reliably inferred from short-term motion prediction alone, but can be effectively learned from motion history.
Going with the Flow: Koopman Behavioral Models as Implicit Planners for Visuo-Motor Dexterity
Feb 07, 2026There has been rapid and dramatic progress in robots' ability to learn complex visuo-motor manipulation skills from demonstrations, thanks in part to expressive policy classes that employ diffusion- and transformer-based backbones. However, these design choices require significant data and computational resources and remain far from reliable, particularly within the context of multi-fingered dexterous manipulation. Fundamentally, they model skills as reactive mappings and rely on fixed-horizon action chunking to mitigate jitter, creating a rigid trade-off between temporal coherence and reactivity. In this work, we introduce Unified Behavioral Models (UBMs), a framework that learns to represent dexterous skills as coupled dynamical systems that capture how visual features of the environment (visual flow) and proprioceptive states of the robot (action flow) co-evolve. By capturing such behavioral dynamics, UBMs can ensure temporal coherence by construction rather than by heuristic averaging. To operationalize these models, we propose Koopman-UBM, a first instantiation of UBMs that leverages Koopman Operator theory to effectively learn a unified representation in which the joint flow of latent visual and proprioceptive features is governed by a structured linear system. We demonstrate that Koopman-UBM can be viewed as an implicit planner: given an initial condition, it analytically computes the desired robot behavior while simultaneously ''imagining'' the resulting flow of visual features over the entire skill horizon. To enable reactivity and adaptation, we introduce an online replanning strategy in which the model acts as its own runtime monitor that automatically triggers replanning when predicted and observed visual flow diverge beyond a threshold. Across seven simulated tasks and two real-world tasks, we demonstrate that K-UBM matches or exceeds the performance of state-of-the-art baselines, while offering considerably faster inference, smooth execution, robustness to occlusions, and flexible replanning.
A Closed-Form Geometric Retargeting Solver for Upper Body Humanoid Robot Teleoperation
Feb 02, 2026Retargeting human motion to robot poses is a practical approach for teleoperating bimanual humanoid robot arms, but existing methods can be suboptimal and slow, often causing undesirable motion or latency. This is due to optimizing to match robot end-effector to human hand position and orientation, which can also limit the robot's workspace to that of the human. Instead, this paper reframes retargeting as an orientation alignment problem, enabling a closed-form, geometric solution algorithm with an optimality guarantee. The key idea is to align a robot arm to a human's upper and lower arm orientations, as identified from shoulder, elbow, and wrist (SEW) keypoints; hence, the method is called SEW-Mimic. The method has fast inference (3 kHz) on standard commercial CPUs, leaving computational overhead for downstream applications; an example in this paper is a safety filter to avoid bimanual self-collision. The method suits most 7-degree-of-freedom robot arms and humanoids, and is agnostic to input keypoint source. Experiments show that SEW-Mimic outperforms other retargeting methods in computation time and accuracy. A pilot user study suggests that the method improves teleoperation task success. Preliminary analysis indicates that data collected with SEW-Mimic improves policy learning due to being smoother. SEW-Mimic is also shown to be a drop-in way to accelerate full-body humanoid retargeting. Finally, hardware demonstrations illustrate SEW-Mimic's practicality. The results emphasize the utility of SEW-Mimic as a fundamental building block for bimanual robot manipulation and humanoid robot teleoperation.
Language Conditioning Improves Accuracy of Aircraft Goal Prediction in Untowered Airspace
Sep 17, 2025Autonomous aircraft must safely operate in untowered airspace, where coordination relies on voice-based communication among human pilots. Safe operation requires an aircraft to predict the intent, and corresponding goal location, of other aircraft. This paper introduces a multimodal framework for aircraft goal prediction that integrates natural language understanding with spatial reasoning to improve autonomous decision-making in such environments. We leverage automatic speech recognition and large language models to transcribe and interpret pilot radio calls, identify aircraft, and extract discrete intent labels. These intent labels are fused with observed trajectories to condition a temporal convolutional network and Gaussian mixture model for probabilistic goal prediction. Our method significantly reduces goal prediction error compared to baselines that rely solely on motion history, demonstrating that language-conditioned prediction increases prediction accuracy. Experiments on a real-world dataset from an untowered airport validate the approach and highlight its potential to enable socially aware, language-conditioned robotic motion planning.
Joint Model-based Model-free Diffusion for Planning with Constraints
Sep 10, 2025Model-free diffusion planners have shown great promise for robot motion planning, but practical robotic systems often require combining them with model-based optimization modules to enforce constraints, such as safety. Naively integrating these modules presents compatibility challenges when diffusion's multi-modal outputs behave adversarially to optimization-based modules. To address this, we introduce Joint Model-based Model-free Diffusion (JM2D), a novel generative modeling framework. JM2D formulates module integration as a joint sampling problem to maximize compatibility via an interaction potential, without additional training. Using importance sampling, JM2D guides modules outputs based only on evaluations of the interaction potential, thus handling non-differentiable objectives commonly arising from non-convex optimization modules. We evaluate JM2D via application to aligning diffusion planners with safety modules on offline RL and robot manipulation. JM2D significantly improves task performance compared to conventional safety filters without sacrificing safety. Further, we show that conditional generation is a special case of JM2D and elucidate key design choices by comparing with SOTA gradient-based and projection-based diffusion planners. More details at: https://jm2d-corl25.github.io/.
SAIL: Faster-than-Demonstration Execution of Imitation Learning Policies
Jun 13, 2025Offline Imitation Learning (IL) methods such as Behavior Cloning are effective at acquiring complex robotic manipulation skills. However, existing IL-trained policies are confined to executing the task at the same speed as shown in demonstration data. This limits the task throughput of a robotic system, a critical requirement for applications such as industrial automation. In this paper, we introduce and formalize the novel problem of enabling faster-than-demonstration execution of visuomotor policies and identify fundamental challenges in robot dynamics and state-action distribution shifts. We instantiate the key insights as SAIL (Speed Adaptation for Imitation Learning), a full-stack system integrating four tightly-connected components: (1) a consistency-preserving action inference algorithm for smooth motion at high speed, (2) high-fidelity tracking of controller-invariant motion targets, (3) adaptive speed modulation that dynamically adjusts execution speed based on motion complexity, and (4) action scheduling to handle real-world system latencies. Experiments on 12 tasks across simulation and two real, distinct robot platforms show that SAIL achieves up to a 4x speedup over demonstration speed in simulation and up to 3.2x speedup in the real world. Additional detail is available at https://nadunranawaka1.github.io/sail-policy
Seeing, Saying, Solving: An LLM-to-TL Framework for Cooperative Robots
May 19, 2025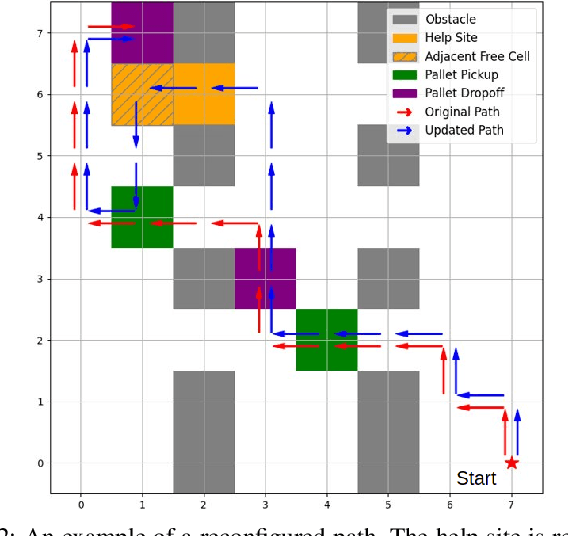
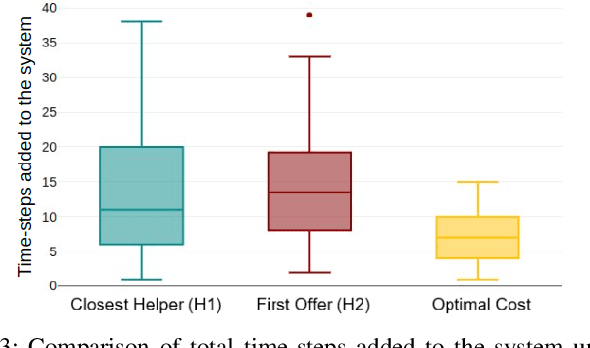
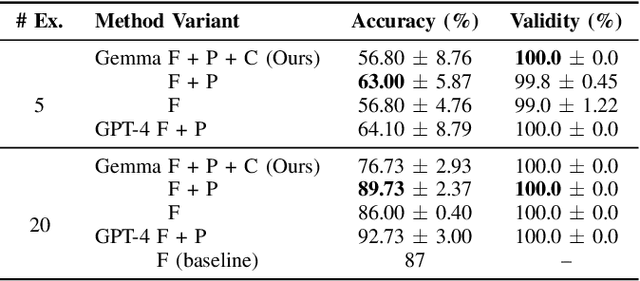
Increased robot deployment, such as in warehousing, has revealed a need for seamless collaboration among heterogeneous robot teams to resolve unforeseen conflicts. To address this challenge, we propose a novel, decentralized framework for robots to request and provide help. The framework begins with robots detecting conflicts using a Vision Language Model (VLM), then reasoning over whether help is needed. If so, it crafts and broadcasts a natural language (NL) help request using a Large Language Model (LLM). Potential helper robots reason over the request and offer help (if able), along with information about impact to their current tasks. Helper reasoning is implemented via an LLM grounded in Signal Temporal Logic (STL) using a Backus-Naur Form (BNF) grammar to guarantee syntactically valid NL-to-STL translations, which are then solved as a Mixed Integer Linear Program (MILP). Finally, the requester robot chooses a helper by reasoning over impact on the overall system. We evaluate our system via experiments considering different strategies for choosing a helper, and find that a requester robot can minimize overall time impact on the system by considering multiple help offers versus simple heuristics (e.g., selecting the nearest robot to help).