 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExact, Efficient, and Safe Occlusion-Aware Planning Using AH-Polyhedrons
Jun 13, 2026Safely handling occlusions is a fundamental challenge for autonomous mobile robots operating in dynamic environments. This issue is especially prominent in autonomous valet parking (AVP), where traffic rules are lax, occlusions are frequent and cluttered, and overly conservative behavior can leave vehicles stuck. However, existing methods either lack formal safety guarantees, assume agents follow road structures, or introduce conservatism, leaving occlusion-aware planning for AVP an open challenge. In this paper, we propose APRO (AH-Polyhedron Reachability for Occlusions), an exact and efficient occlusion-aware planning framework based on game-theoretic active perception and AH-polyhedron reachability analysis with AVP as our canonical use case. Our key insight is to reformulate set-based safety conditions in prior work as unions of AH-polyhedrons, enabling exact safety verification through linear programming (LP) without any additional conservatism in set computations or assumptions on road topology. We further show how the resulting safety conditions can be integrated into optimization-based planners or a bisection search scheme for real-time applications. We validate our method in simulation and hardware experiments, including data replay on a real-world parking lot dataset. Experimental results demonstrate that our method consistently achieved a 100% safety rate across all evaluated scenarios while maintaining real-time performance, resulting in safer and more optimal decisions than existing methods with formal safety guarantees.
RTD-RAX: Fast, Safe Trajectory Planning for Systems under Unknown Disturbances
Mar 23, 2026Reachability-based Trajectory Design (RTD) is a provably safe, real-time trajectory planning framework that combines offline reachable-set computation with online trajectory optimization. However, standard RTD implementations suffer from two key limitations: conservatism induced by worst-case reachable-set overapproximations, and an inability to account for real-time disturbances during execution. This paper presents RTD-RAX, a runtime-assurance extension of RTD that utilizes a non-conservative RTD formulation to rapidly generate goal-directed candidate trajectories, and utilizes mixed monotone reachability for fast, disturbance-aware online safety certification. When proposed trajectories fail safety certification under real-time uncertainty, a repair procedure finds nearby safe trajectories that preserve progress toward the goal while guaranteeing safety under real-time disturbances.
Selecting Spots by Explicitly Predicting Intention from Motion History Improves Performance in Autonomous Parking
Mar 05, 2026In many applications of social navigation, existing works have shown that predicting and reasoning about human intentions can help robotic agents make safer and more socially acceptable decisions. In this work, we study this problem for autonomous valet parking (AVP), where an autonomous vehicle ego agent must drop off its passengers, explore the parking lot, find a parking spot, negotiate for the spot with other vehicles, and park in the spot without human supervision. Specifically, we propose an AVP pipeline that selects parking spots by explicitly predicting where other agents are going to park from their motion history using learned models and probabilistic belief maps. To test this pipeline, we build a simulation environment with reactive agents and realistic modeling assumptions on the ego agent, such as occlusion-aware observations, and imperfect trajectory prediction. Simulation experiments show that our proposed method outperforms existing works that infer intentions from future predicted motion or embed them implicitly in end-to-end models, yielding better results in prediction accuracy, social acceptance, and task completion. Our key insight is that, in parking, where driving regulations are more lax, explicit intention prediction is crucial for reasoning about diverse and ambiguous long-term goals, which cannot be reliably inferred from short-term motion prediction alone, but can be effectively learned from motion history.
A Closed-Form Geometric Retargeting Solver for Upper Body Humanoid Robot Teleoperation
Feb 02, 2026Retargeting human motion to robot poses is a practical approach for teleoperating bimanual humanoid robot arms, but existing methods can be suboptimal and slow, often causing undesirable motion or latency. This is due to optimizing to match robot end-effector to human hand position and orientation, which can also limit the robot's workspace to that of the human. Instead, this paper reframes retargeting as an orientation alignment problem, enabling a closed-form, geometric solution algorithm with an optimality guarantee. The key idea is to align a robot arm to a human's upper and lower arm orientations, as identified from shoulder, elbow, and wrist (SEW) keypoints; hence, the method is called SEW-Mimic. The method has fast inference (3 kHz) on standard commercial CPUs, leaving computational overhead for downstream applications; an example in this paper is a safety filter to avoid bimanual self-collision. The method suits most 7-degree-of-freedom robot arms and humanoids, and is agnostic to input keypoint source. Experiments show that SEW-Mimic outperforms other retargeting methods in computation time and accuracy. A pilot user study suggests that the method improves teleoperation task success. Preliminary analysis indicates that data collected with SEW-Mimic improves policy learning due to being smoother. SEW-Mimic is also shown to be a drop-in way to accelerate full-body humanoid retargeting. Finally, hardware demonstrations illustrate SEW-Mimic's practicality. The results emphasize the utility of SEW-Mimic as a fundamental building block for bimanual robot manipulation and humanoid robot teleoperation.
Goal-Reaching Trajectory Design Near Danger with Piecewise Affine Reach-avoid Computation
Feb 23, 2024

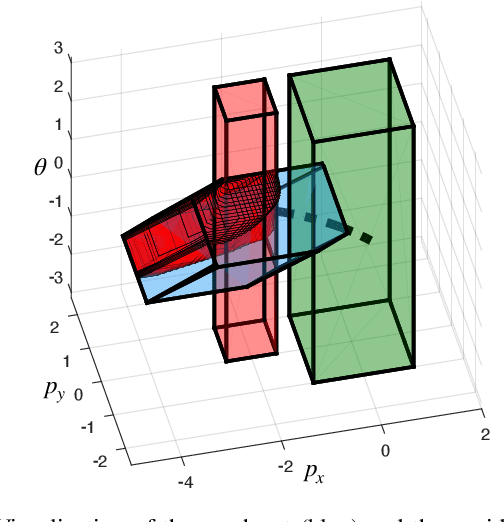
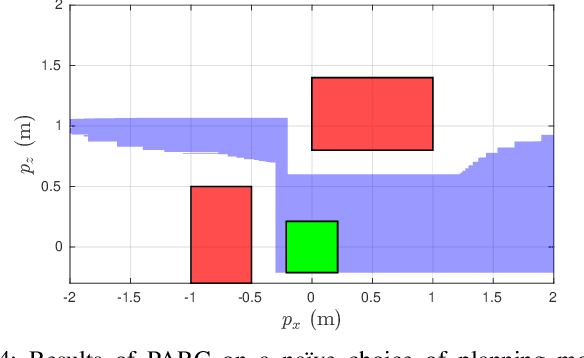
Autonomous mobile robots must maintain safety, but should not sacrifice performance, leading to the classical reach-avoid problem. This paper seeks to compute trajectory plans for which a robot is guaranteed to reach a goal and avoid obstacles in the specific near-danger case that the obstacles and goal are near each other. The proposed method builds off of a common approach of using a simplified planning model to generate plans, which are then tracked using a high-fidelity tracking model and controller. Existing safe planning approaches use reachability analysis to overapproximate the error between these models, but this introduces additional numerical approximation error and thereby conservativeness that prevents goal-reaching. The present work instead proposes a Piecewise Affine Reach-avoid Computation (PARC) method to tightly approximate the reachable set of the planning model. With PARC, the main source of conservativeness is the model mismatch, which can be mitigated by careful controller and planning model design. The utility of this method is demonstrated through extensive numerical experiments in which PARC outperforms state-of-the-art reach-avoid methods in near-danger goal-reaching. Furthermore, in a simulated demonstration, PARC enables the generation of provably-safe extreme vehicle dynamics drift parking maneuvers.
Constrained Feedforward Neural Network Training via Reachability Analysis
Jul 16, 2021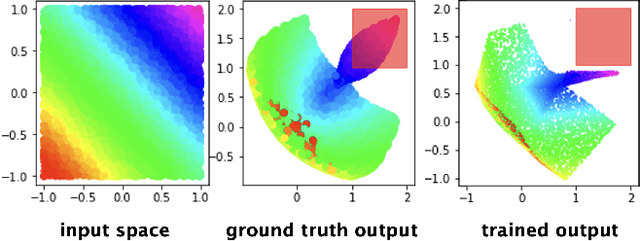
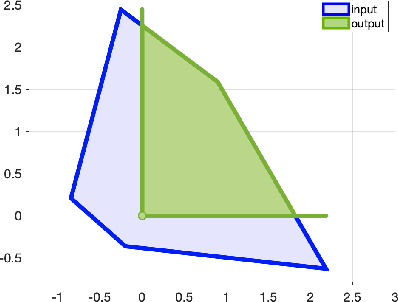
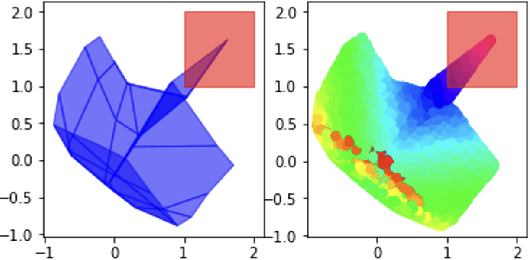
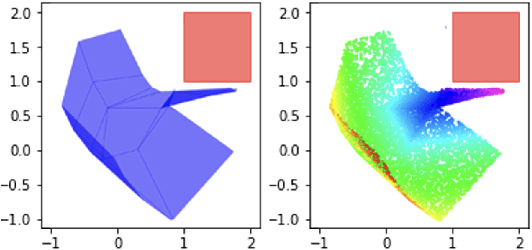
Neural networks have recently become popular for a wide variety of uses, but have seen limited application in safety-critical domains such as robotics near and around humans. This is because it remains an open challenge to train a neural network to obey safety constraints. Most existing safety-related methods only seek to verify that already-trained networks obey constraints, requiring alternating training and verification. Instead, this work proposes a constrained method to simultaneously train and verify a feedforward neural network with rectified linear unit (ReLU) nonlinearities. Constraints are enforced by computing the network's output-space reachable set and ensuring that it does not intersect with unsafe sets; training is achieved by formulating a novel collision-check loss function between the reachable set and unsafe portions of the output space. The reachable and unsafe sets are represented by constrained zonotopes, a convex polytope representation that enables differentiable collision checking. The proposed method is demonstrated successfully on a network with one nonlinearity layer and approximately 50 parameters.