 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Feedforward Neural Network Training via Reachability Analysis
Jul 16, 2021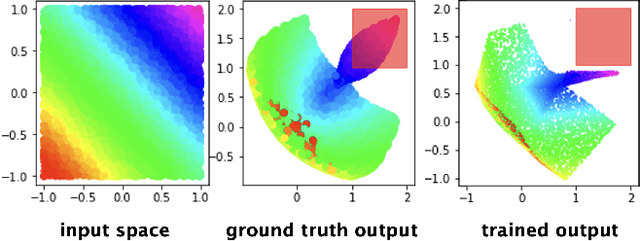
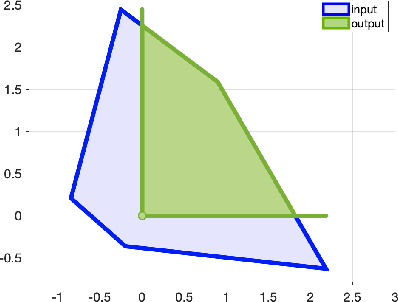
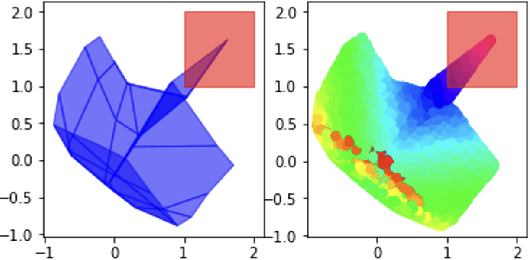
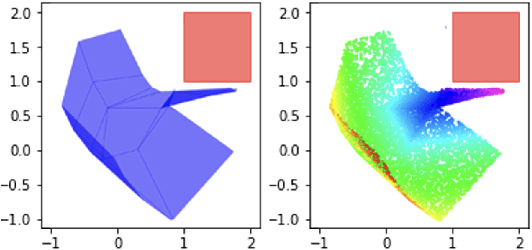
Neural networks have recently become popular for a wide variety of uses, but have seen limited application in safety-critical domains such as robotics near and around humans. This is because it remains an open challenge to train a neural network to obey safety constraints. Most existing safety-related methods only seek to verify that already-trained networks obey constraints, requiring alternating training and verification. Instead, this work proposes a constrained method to simultaneously train and verify a feedforward neural network with rectified linear unit (ReLU) nonlinearities. Constraints are enforced by computing the network's output-space reachable set and ensuring that it does not intersect with unsafe sets; training is achieved by formulating a novel collision-check loss function between the reachable set and unsafe portions of the output space. The reachable and unsafe sets are represented by constrained zonotopes, a convex polytope representation that enables differentiable collision checking. The proposed method is demonstrated successfully on a network with one nonlinearity layer and approximately 50 parameters.
Data-Driven Protection Levels for Camera and 3D Map-based Safe Urban Localization
Jan 20, 2021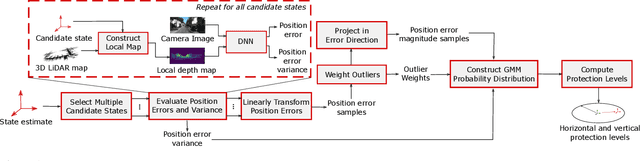

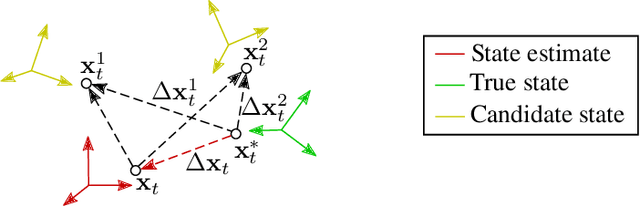
Reliably assessing the error in an estimated vehicle position is integral for ensuring the vehicle's safety in urban environments. Many existing approaches use GNSS measurements to characterize protection levels (PLs) as probabilistic upper bounds on the position error. However, GNSS signals might be reflected or blocked in urban environments, and thus additional sensor modalities need to be considered to determine PLs. In this paper, we propose a novel approach for computing PLs by matching camera image measurements to a LiDAR-based 3D map of the environment. We specify a Gaussian mixture model probability distribution of position error using deep neural network-based data-driven models and statistical outlier weighting techniques. From the probability distribution, we compute the PLs by evaluating the position error bound using numerical line-search methods. Through experimental validation with real-world data, we demonstrate that the PLs computed from our method are reliable bounds on the position error in urban environments.
A New Particle Filter Framework for Bayesian Receiver Autonomous Integrity Monitoring in Urban Environments
Jan 20, 2021


Existing urban navigation algorithms employ integrity monitoring (IM) to mitigate the impact of measurement bias errors and determine system availability when estimating the position of a receiver. Many IM techniques, such as receiver autonomous integrity monitoring (RAIM), utilize measurement residuals associated with a single receiver position to provide integrity. However, identifying a single correct receiver position is often challenging in urban environments due to low satellite visibility and multiple measurements with bias errors. To address this, we propose Particle RAIM as a novel framework for robust state estimation and IM using GNSS and odometry measurements. Particle RAIM integrates residual-based RAIM with a particle filter and Gaussian mixture model likelihood to jointly perform state estimation and fault mitigation using a multimodal probability distribution of the receiver state. Our experiments on simulated and real-world data show that Particle RAIM achieves smaller positioning errors as well as smaller probability of false alarm and probability of missed-identification in determining system availability than existing urban localization and IM approaches in challenging environments with a relatively small computation overhead.