 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Particle Filter Framework for Bayesian Receiver Autonomous Integrity Monitoring in Urban Environments
Paper and Code
Jan 20, 2021


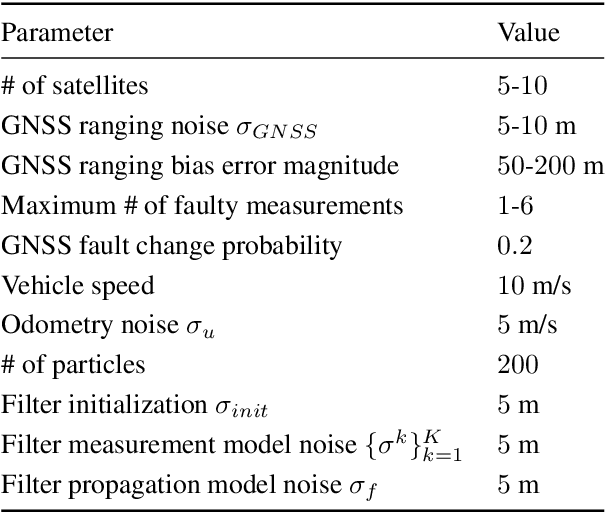
Existing urban navigation algorithms employ integrity monitoring (IM) to mitigate the impact of measurement bias errors and determine system availability when estimating the position of a receiver. Many IM techniques, such as receiver autonomous integrity monitoring (RAIM), utilize measurement residuals associated with a single receiver position to provide integrity. However, identifying a single correct receiver position is often challenging in urban environments due to low satellite visibility and multiple measurements with bias errors. To address this, we propose Particle RAIM as a novel framework for robust state estimation and IM using GNSS and odometry measurements. Particle RAIM integrates residual-based RAIM with a particle filter and Gaussian mixture model likelihood to jointly perform state estimation and fault mitigation using a multimodal probability distribution of the receiver state. Our experiments on simulated and real-world data show that Particle RAIM achieves smaller positioning errors as well as smaller probability of false alarm and probability of missed-identification in determining system availability than existing urban localization and IM approaches in challenging environments with a relatively small computation overhead.