 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Attention Enhanced Multi-Agent DRL for UAV-Assisted Wireless Networks with Limited Communications
Mar 23, 2026In this paper, we employ multiple UAVs to accelerate data transmissions from ground users (GUs) to a remote base station (BS) via the UAVs' relay communications. The UAVs' intermittent information exchanges typically result in delays in acquiring the complete system state and hinder their effective collaboration. To maximize the overall throughput, we first propose a delay-tolerant multi-agent deep reinforcement learning (MADRL) algorithm that integrates a delay-penalized reward to encourage information sharing among UAVs, while jointly optimizing the UAVs' trajectory planning, network formation, and transmission control strategies. Additionally, considering information loss due to unreliable channel conditions, we further propose a spatio-temporal attention based prediction approach to recover the lost information and enhance each UAV's awareness of the network state. These two designs are envisioned to enhance the network capacity in UAV-assisted wireless networks with limited communications. The simulation results reveal that our new approach achieves over 50\% reduction in information delay and 75% throughput gain compared to the conventional MADRL. Interestingly, it is shown that improving the UAVs' information sharing will not sacrifice the network capacity. Instead, it significantly improves the learning performance and throughput simultaneously. It is also effective in reducing the need for UAVs' information exchange and thus fostering practical deployment of MADRL in UAV-assisted wireless networks.
Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres
Feb 13, 2024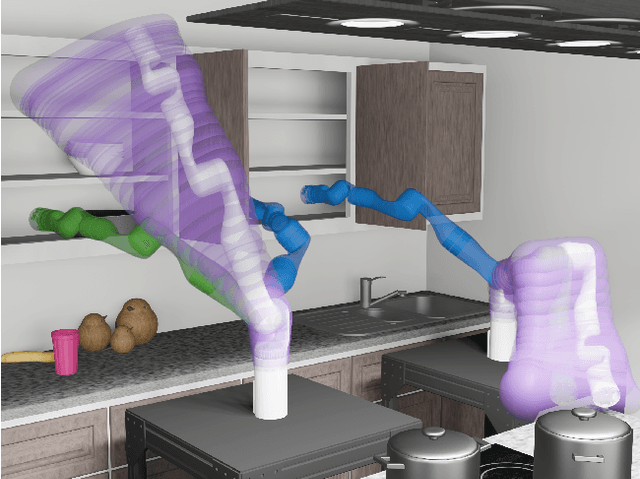
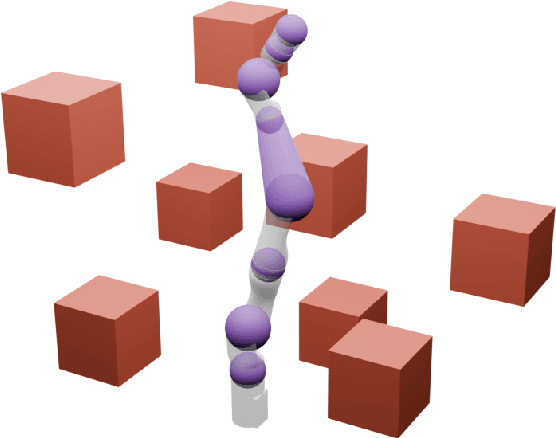
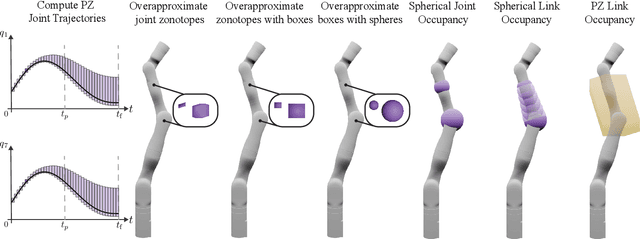
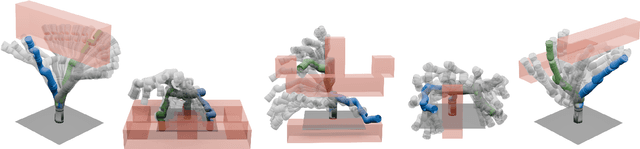
Generating safe motion plans in real-time is necessary for the wide-scale deployment of robots in unstructured and human-centric environments. These motion plans must be safe to ensure humans are not harmed and nearby objects are not damaged. However, they must also be generated in real-time to ensure the robot can quickly adapt to changes in the environment. Many trajectory optimization methods introduce heuristics that trade-off safety and real-time performance, which can lead to potentially unsafe plans. This paper addresses this challenge by proposing Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres (SPARROWS). SPARROWS is a receding-horizon trajectory planner that utilizes the combination of a novel reachable set representation and an exact signed distance function to generate provably-safe motion plans. At runtime, SPARROWS uses parameterized trajectories to compute reachable sets composed entirely of spheres that overapproximate the swept volume of the robot's motion. SPARROWS then performs trajectory optimization to select a safe trajectory that is guaranteed to be collision-free. We demonstrate that SPARROWS' novel reachable set is significantly less conservative than previous approaches. We also demonstrate that SPARROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments. Code, data, and video demonstrations can be found at \url{https://roahmlab.github.io/sparrows/}.
Can't Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under Uncertainty
Jan 30, 2023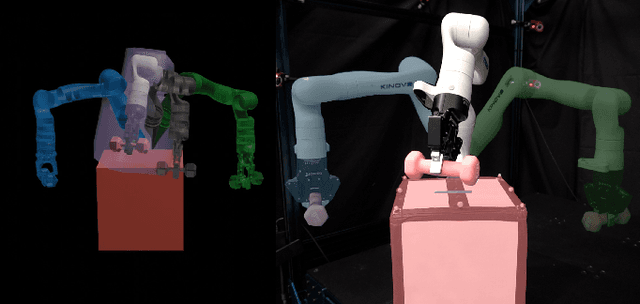
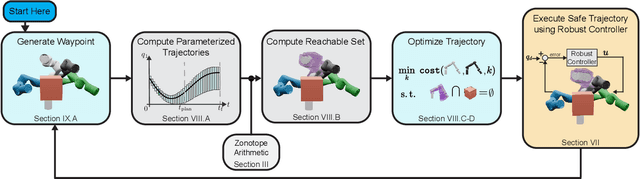
A key challenge to the widespread deployment of robotic manipulators is the need to ensure safety in arbitrary environments while generating new motion plans in real-time. In particular, one must ensure that a manipulator does not collide with obstacles, collide with itself, or exceed its joint torque limits. This challenge is compounded by the need to account for uncertainty in the mass and inertia of manipulated objects, and potentially the robot itself. The present work addresses this challenge by proposing Autonomous Robust Manipulation via Optimization with Uncertainty-aware Reachability (ARMOUR), a provably-safe, receding-horizon trajectory planner and tracking controller framework for serial link manipulators. ARMOUR works by first constructing a robust, passivity-based controller that is proven to enable a manipulator to track desired trajectories with bounded error despite uncertain dynamics. Next, ARMOUR uses a novel variation on the Recursive Newton-Euler Algorithm (RNEA) to compute the set of all possible inputs required to track any trajectory within a continuum of desired trajectories. Finally, the method computes an over-approximation to the swept volume of the manipulator; this enables one to formulate an optimization problem, which can be solved in real-time, to synthesize provably-safe motion. The proposed method is compared to state of the art methods and demonstrated on a variety of challenging manipulation examples in simulation and on real hardware, such as maneuvering a dumbbell with uncertain mass around obstacles.