 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeServing Time: Real-Time, Safe Motion Planning and Control for Manipulation of Unsecured Objects
Sep 06, 2023



A key challenge to ensuring the rapid transition of robotic systems from the industrial sector to more ubiquitous applications is the development of algorithms that can guarantee safe operation while in close proximity to humans. Motion planning and control methods, for instance, must be able to certify safety while operating in real-time in arbitrary environments and in the presence of model uncertainty. This paper proposes Wrench Analysis for Inertial Transport using Reachability (WAITR), a certifiably safe motion planning and control framework for serial link manipulators that manipulate unsecured objects in arbitrary environments. WAITR uses reachability analysis to construct over-approximations of the contact wrench applied to unsecured objects, which captures uncertainty in the manipulator dynamics, the object dynamics, and contact parameters such as the coefficient of friction. An optimization problem formulation is presented that can be solved in real-time to generate provably-safe motions for manipulating the unsecured objects. This paper illustrates that WAITR outperforms state of the art methods in a variety of simulation experiments and demonstrates its performance in the real-world.
Can't Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under Uncertainty
Jan 30, 2023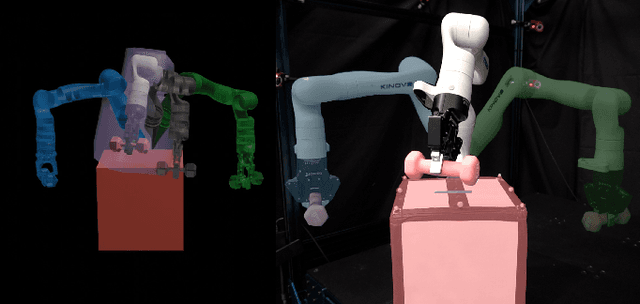
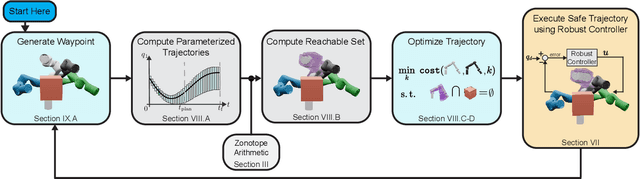
A key challenge to the widespread deployment of robotic manipulators is the need to ensure safety in arbitrary environments while generating new motion plans in real-time. In particular, one must ensure that a manipulator does not collide with obstacles, collide with itself, or exceed its joint torque limits. This challenge is compounded by the need to account for uncertainty in the mass and inertia of manipulated objects, and potentially the robot itself. The present work addresses this challenge by proposing Autonomous Robust Manipulation via Optimization with Uncertainty-aware Reachability (ARMOUR), a provably-safe, receding-horizon trajectory planner and tracking controller framework for serial link manipulators. ARMOUR works by first constructing a robust, passivity-based controller that is proven to enable a manipulator to track desired trajectories with bounded error despite uncertain dynamics. Next, ARMOUR uses a novel variation on the Recursive Newton-Euler Algorithm (RNEA) to compute the set of all possible inputs required to track any trajectory within a continuum of desired trajectories. Finally, the method computes an over-approximation to the swept volume of the manipulator; this enables one to formulate an optimization problem, which can be solved in real-time, to synthesize provably-safe motion. The proposed method is compared to state of the art methods and demonstrated on a variety of challenging manipulation examples in simulation and on real hardware, such as maneuvering a dumbbell with uncertain mass around obstacles.
Reachable Sets for Safe, Real-Time Manipulator Trajectory Design
Feb 05, 2020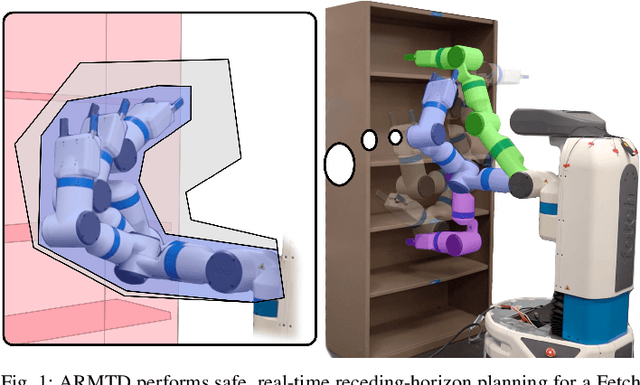
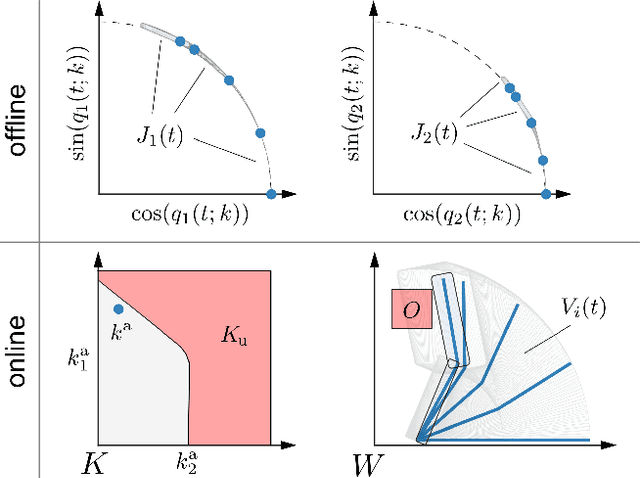
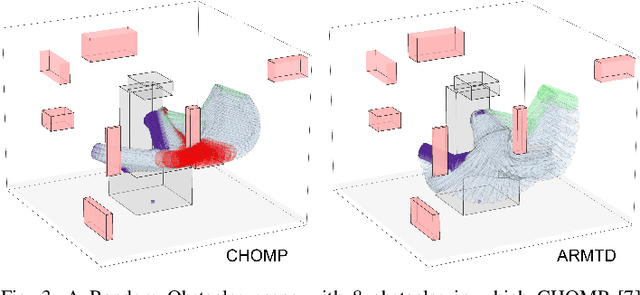
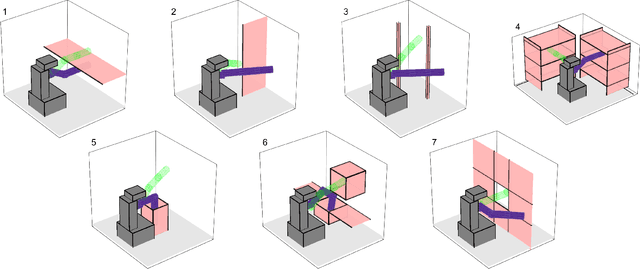
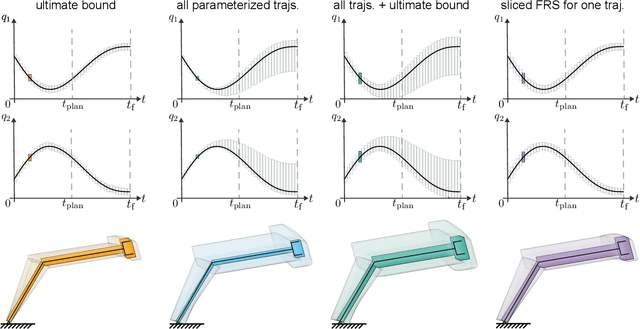
For robotic arms to operate in arbitrary environments, especially near people, it is critical to certify the safety of their motion planning algorithms. However, there is often a trade-off between safety and real-time performance; one can either carefully design safe plans, or rapidly generate potentially-unsafe plans. This work presents a receding-horizon, real-time trajectory planner with safety guarantees, called ARMTD (Autonomous Reachability-based Manipulator Trajectory Design). The method first computes (offline) a reachable set of parameterized trajectories for each joint of an arm. Each trajectory includes a fail-safe maneuver (braking to a stop). At runtime, in each receding-horizon planning iteration, ARMTD constructs a reachable set of the entire arm in workspace and intersects it with obstacles to generate sub-differentiable and provably-conservative collision-avoidance constraints on the trajectory parameters. ARMTD then performs trajectory optimization for an arbitrary cost function on the parameters, subject to these constraints. On a 6 degree-of-freedom arm, ARMTD outperforms CHOMP in simulation and completes a variety of real-time planning tasks on hardware, all without collisions.
Safe, Aggressive Quadrotor Flight via Reachability-based Trajectory Design
Apr 11, 2019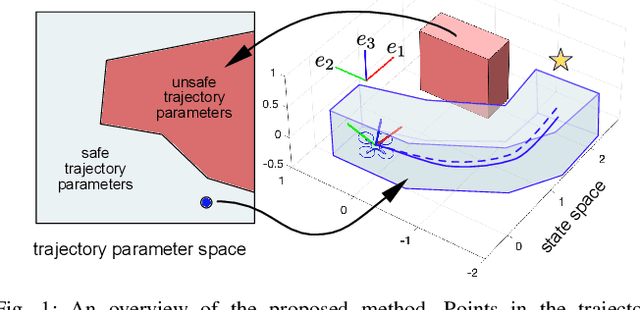
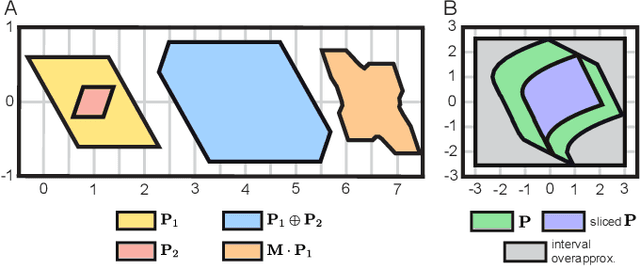
Quadrotors can provide services such as infrastructure inspection and search-and-rescue, which require operating autonomously in cluttered environments. Autonomy is typically achieved with receding-horizon planning, where a short plan is executed while a new one is computed, because sensors receive limited information at any time. To ensure safety and prevent robot loss, plans must be verified as collision free despite uncertainty (e.g, tracking error). Existing spline-based planners dilate obstacles uniformly to compensate for uncertainty, which can be conservative. On the other hand, reachability-based planners can include trajectory-dependent uncertainty as a function of the planned trajectory. This work applies Reachability-based Trajectory Design (RTD) to plan quadrotor trajectories that are safe despite trajectory-dependent tracking error. This is achieved by using zonotopes in a novel way for online planning. Simulations show aggressive flight up to 5 m/s with zero crashes in 500 cluttered, randomized environments.