 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Short-Term Relocalization Problems In Monocular Keyframe Visual SLAM Using Spatial And Semantic Data
Jul 28, 2024In Monocular Keyframe Visual Simultaneous Localization and Mapping (MKVSLAM) frameworks, when incremental position tracking fails, global pose has to be recovered in a short-time window, also known as short-term relocalization. This capability is crucial for mobile robots to have reliable navigation, build accurate maps, and have precise behaviors around human collaborators. This paper focuses on the development of robust short-term relocalization capabilities for mobile robots using a monocular camera system. A novel multimodal keyframe descriptor is introduced, that contains semantic information of objects detected in the environment and the spatial information of the camera. Using this descriptor, a new Keyframe-based Place Recognition (KPR) method is proposed that is formulated as a multi-stage keyframe filtering algorithm, leading to a new relocalization pipeline for MKVSLAM systems. The proposed approach is evaluated over several indoor GPS denied datasets and demonstrates accurate pose recovery, in comparison to a bag-of-words approach.
RecGS: Removing Water Caustic with Recurrent Gaussian Splatting
Jul 14, 2024



Water caustics are commonly observed in seafloor imaging data from shallow-water areas. Traditional methods that remove caustic patterns from images often rely on 2D filtering or pre-training on an annotated dataset, hindering the performance when generalizing to real-world seafloor data with 3D structures. In this paper, we present a novel method Recurrent Gaussian Splatting, which takes advantage of today's photorealistic 3D reconstruction technology, 3DGS, to separate caustics from seafloor imagery. With a sequence of images taken by an underwater robot, we build 3DGS recursively and decompose the caustic with low-pass filtering in each iteration. In the experiments, we analyze and compare with different methods, including joint optimization, 2D filtering, and deep learning approaches. The results show that our method can effectively separate the caustic from the seafloor, improving the visual appearance.
Data-driven controllers and the need for perception systems in underwater manipulation
Sep 21, 2021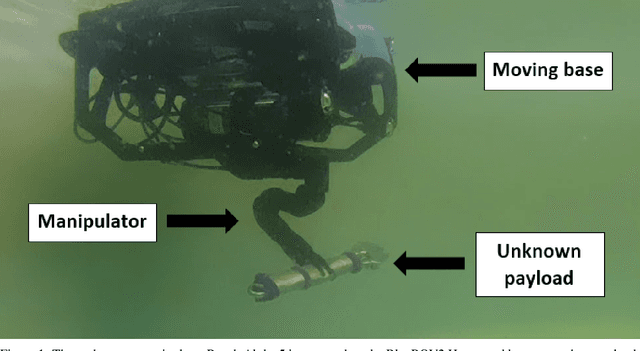
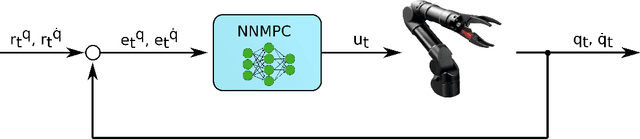
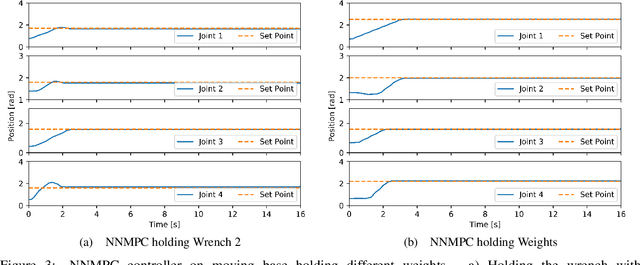
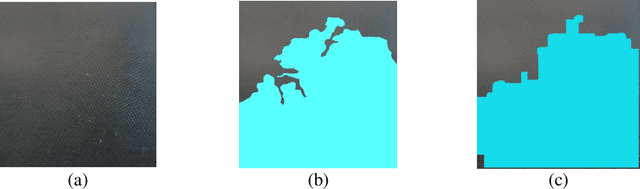
The underwater environment poses a complex problem for developing autonomous capabilities for Underwater Vehicle Manipulator Systems (UVMSs). The modeling of UVMSs is a complicated and costly process due to the highly nonlinear dynamics and the presence of unknown hydrodynamical effects. This is aggravated in tasks where the manipulation of objects is necessary, as this may not only introduce external disturbances that can lead to a fast degradation of the control system performance, but also requires the coordinating with a vision system for the correct grasping and operation of the object. In this article, we introduce a control strategy for UVMSs working with unknown payloads. The proposed control strategy is based on a data-driven optimal controller. We present a number of experimental results showing the benefits of the proposed strategy. Furthermore, we include a discussion regarding the visual perception requirements for the UVMS in order to achieve full autonomy in underwater manipulation tasks of unknown payloads.
Next-generation perception system for automated defects detection in composite laminates via polarized computational imaging
Aug 24, 2021


Finishing operations on large-scale composite components like wind turbine blades, including trimming and sanding, often require multiple workers and part repositioning. In the composites manufacturing industry, automation of such processes is challenging, as manufactured part geometry may be inconsistent and task completion is based on human judgment and experience. Implementing a mobile, collaborative robotic system capable of performing finishing tasks in dynamic and uncertain environments would improve quality and lower manufacturing costs. To complete the given tasks, the collaborative robotic team must properly understand the environment and detect irregularities in the manufactured parts. In this paper, we describe the initial implementation and demonstration of a polarized computational imaging system to identify defects in composite laminates. As the polarimetric images are highly relevant to the surface micro-geometry, they can be used to detect surface defects that are not visible in conventional color images. The proposed vision system successfully identifies defect types and surface characteristics (e.g., pinholes, voids, scratches, resin flash) for different glass fiber and carbon fiber laminates.
Design and integration of end-effector for 3D printing of novel UV-curable shape memory polymers with a collaborative robotic system
Aug 24, 2021



This paper presents the initial development of a robotic additive manufacturing technology based on ultraviolet (UV)-curable thermoset polymers. This is designed to allow free-standing printing through partial UV curing and fiber reinforcement for structural applications. The proposed system integrates a collaborative robotic manipulator with a custom-built extruder end-effector designed specifically for printing with UV-curable polymers. The system was tested using a variety of resin compositions, some reinforced with milled glass fiber (GF) or fumed silica (FS) and small-scale, 2D and 3D specimens were printed. Dimensional stability was analyzed for all formulations, showing that resin containing up to 50 wt% GF or at least 2.8 wt% FS displayed the most accurate dimensions.
From market-ready ROVs to low-cost AUVs
Aug 12, 2021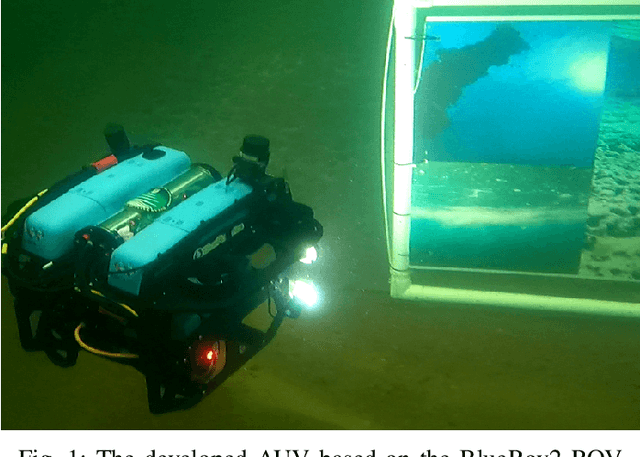
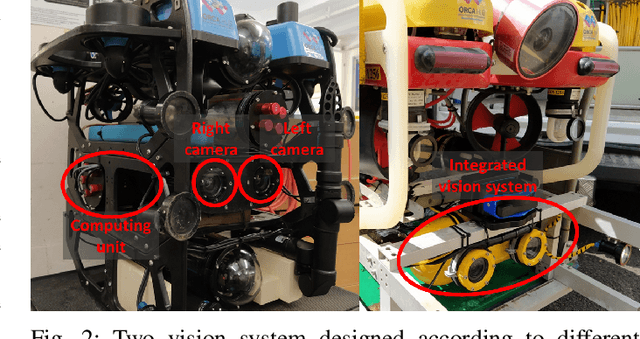
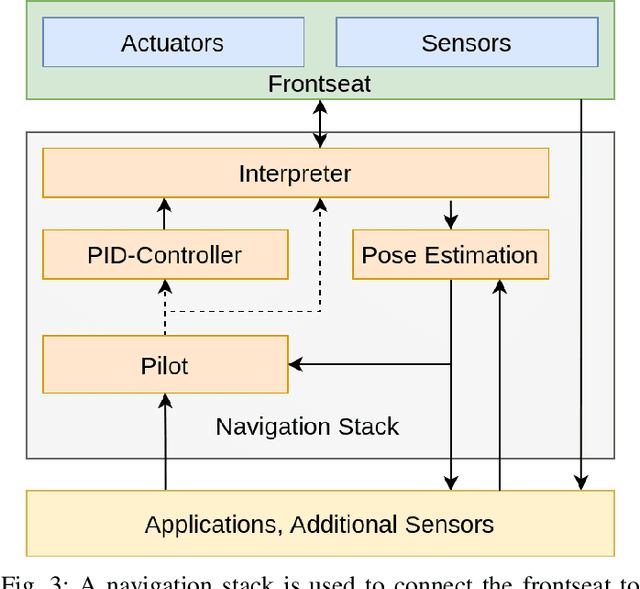
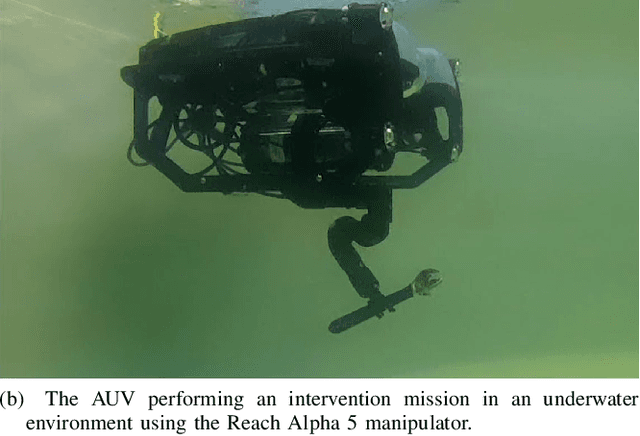
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.
Marine Vehicles Localization Using Grid Cells for Path Integration
Aug 10, 2021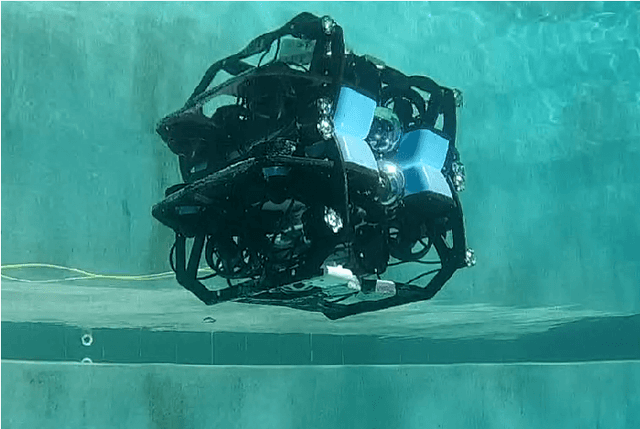



Autonomous Underwater Vehicles (AUVs) are platforms used for research and exploration of marine environments. However, these types of vehicles face many challenges that hinder their widespread use in the industry. One of the main limitations is obtaining accurate position estimation, due to the lack of GPS signal underwater. This estimation is usually done with Kalman filters. However, new developments in the neuroscience field have shed light on the mechanisms by which mammals are able to obtain a reliable estimation of their current position based on external and internal motion cues. A new type of neuron, called Grid cells, has been shown to be part of path integration system in the brain. In this article, we show how grid cells can be used for obtaining a position estimation of underwater vehicles. The model of grid cells used requires only the linear velocities together with heading orientation and provides a reliable estimation of the vehicle's position. We provide simulation results for an AUV which show the feasibility of our proposed methodology.
A reinforcement learning control approach for underwater manipulation under position and torque constraints
Nov 24, 2020
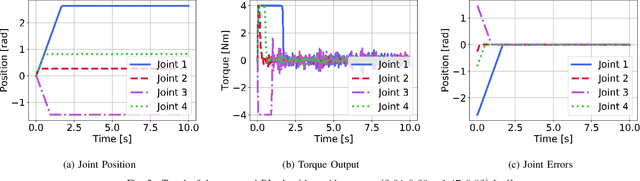

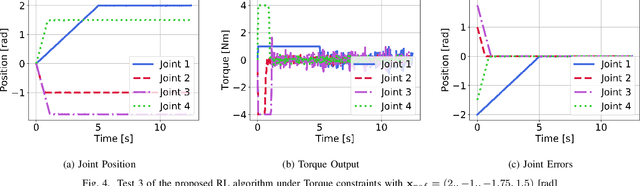
In marine operations underwater manipulators play a primordial role. However, due to uncertainties in the dynamic model and disturbances caused by the environment, low-level control methods require great capabilities to adapt to change. Furthermore, under position and torque constraints the requirements for the control system are greatly increased. Reinforcement learning is a data driven control technique that can learn complex control policies without the need of a model. The learning capabilities of these type of agents allow for great adaptability to changes in the operative conditions. In this article we present a novel reinforcement learning low-level controller for the position control of an underwater manipulator under torque and position constraints. The reinforcement learning agent is based on an actor-critic architecture using sensor readings as state information. Simulation results using the Reach Alpha 5 underwater manipulator show the advantages of the proposed control strategy.
Reachable Sets for Safe, Real-Time Manipulator Trajectory Design
Feb 05, 2020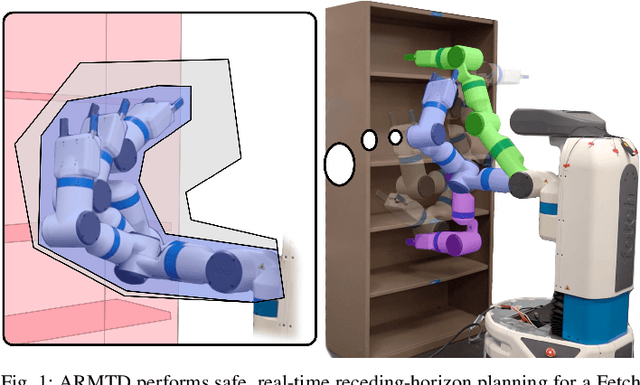
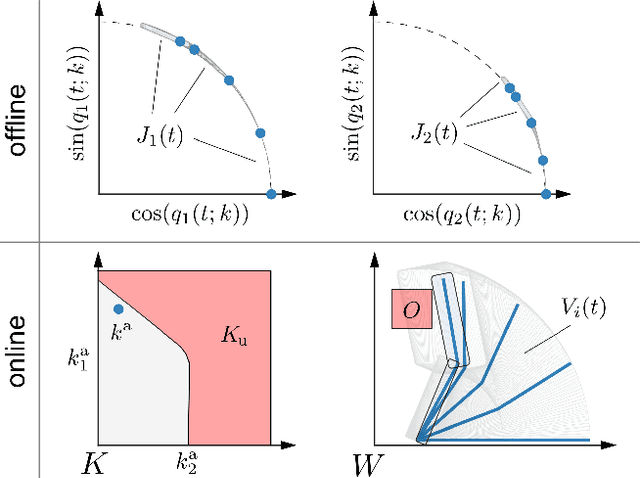
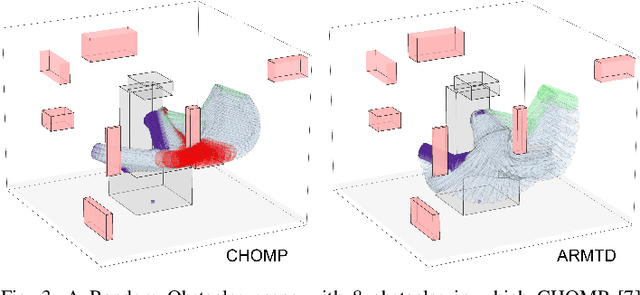
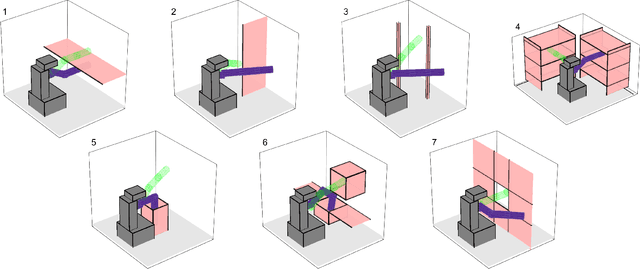
For robotic arms to operate in arbitrary environments, especially near people, it is critical to certify the safety of their motion planning algorithms. However, there is often a trade-off between safety and real-time performance; one can either carefully design safe plans, or rapidly generate potentially-unsafe plans. This work presents a receding-horizon, real-time trajectory planner with safety guarantees, called ARMTD (Autonomous Reachability-based Manipulator Trajectory Design). The method first computes (offline) a reachable set of parameterized trajectories for each joint of an arm. Each trajectory includes a fail-safe maneuver (braking to a stop). At runtime, in each receding-horizon planning iteration, ARMTD constructs a reachable set of the entire arm in workspace and intersects it with obstacles to generate sub-differentiable and provably-conservative collision-avoidance constraints on the trajectory parameters. ARMTD then performs trajectory optimization for an arbitrary cost function on the parameters, subject to these constraints. On a 6 degree-of-freedom arm, ARMTD outperforms CHOMP in simulation and completes a variety of real-time planning tasks on hardware, all without collisions.
A constrained control-planning strategy for redundant manipulators
Oct 09, 2018



This paper presents an interconnected control-planning strategy for redundant manipulators, subject to system and environmental constraints. The method incorporates low-level control characteristics and high-level planning components into a robust strategy for manipulators acting in complex environments, subject to joint limits. This strategy is formulated using an adaptive control rule, the estimated dynamic model of the robotic system and the nullspace of the linearized constraints. A path is generated that takes into account the capabilities of the platform. The proposed method is computationally efficient, enabling its implementation on a real multi-body robotic system. Through experimental results with a 7 DOF manipulator, we demonstrate the performance of the method in real-world scenarios.