 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based Underwater 6D Pose Estimation from RGB
Feb 14, 2023



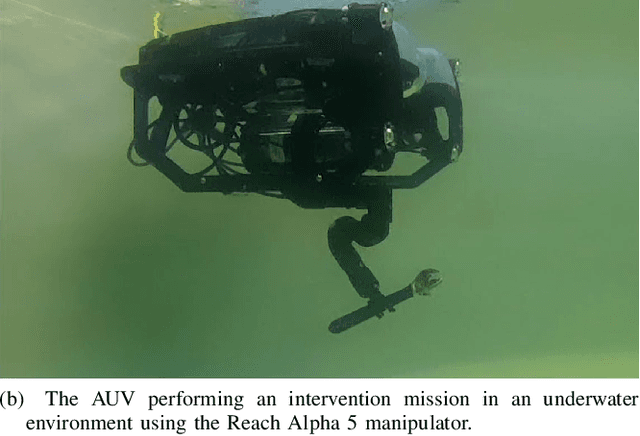
Object pose estimation underwater allows an autonomous system to perform tracking and intervention tasks. Nonetheless, underwater target pose estimation is remarkably challenging due to, among many factors, limited visibility, light scattering, cluttered environments, and constantly varying water conditions. An approach is to employ sonar or laser sensing to acquire 3D data, but besides being costly, the resulting data is normally noisy. For this reason, the community has focused on extracting pose estimates from RGB input. However, the literature is scarce and exhibits low detection accuracy. In this work, we propose an approach consisting of a 2D object detection and a 6D pose estimation that reliably obtains object poses in different underwater scenarios. To test our pipeline, we collect and make available a dataset of 4 objects in 10 different real scenes with annotations for object detection and pose estimation. We test our proposal in real and synthetic settings and compare its performance with similar end-to-end methodologies for 6D object pose estimation. Our dataset contains some challenging objects with symmetrical shapes and poor texture. Regardless of such object characteristics, our proposed method outperforms stat-of-the-art pose accuracy by ~8%. We finally demonstrate the reliability of our pose estimation pipeline by doing experiments with an underwater manipulation in a reaching task.
Nukhada USV: a Robot for Autonomous Surveying and Support to Underwater Operations
Jan 10, 2022
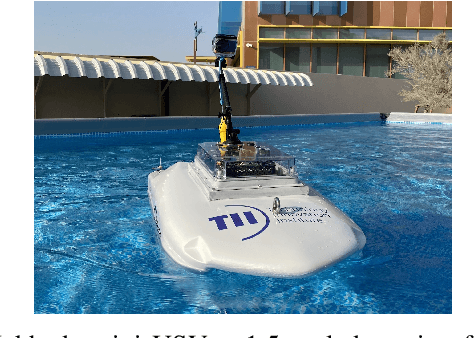
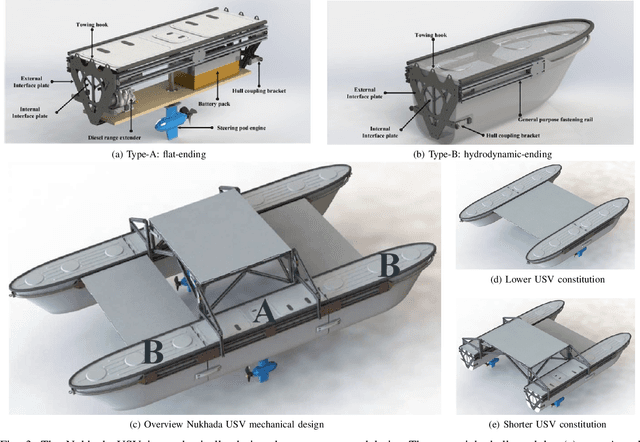
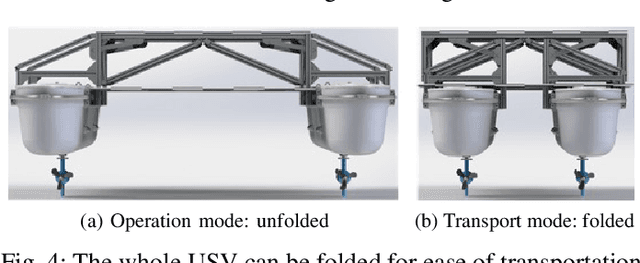
The Technology Innovation Institute in Abu Dhabi, United Arab Emirates, has recently finished the production and testing of a new unmanned surface vehicle, called Nukhada, specifically designed for autonomous survey, inspection, and support to underwater operations. This manuscript describes the main characteristics of the Nukhada USV, as well as some of the trials conducted during the development.
Underwater Robot Manipulation: Advances, Challenges and Prospective Ventures
Jan 09, 2022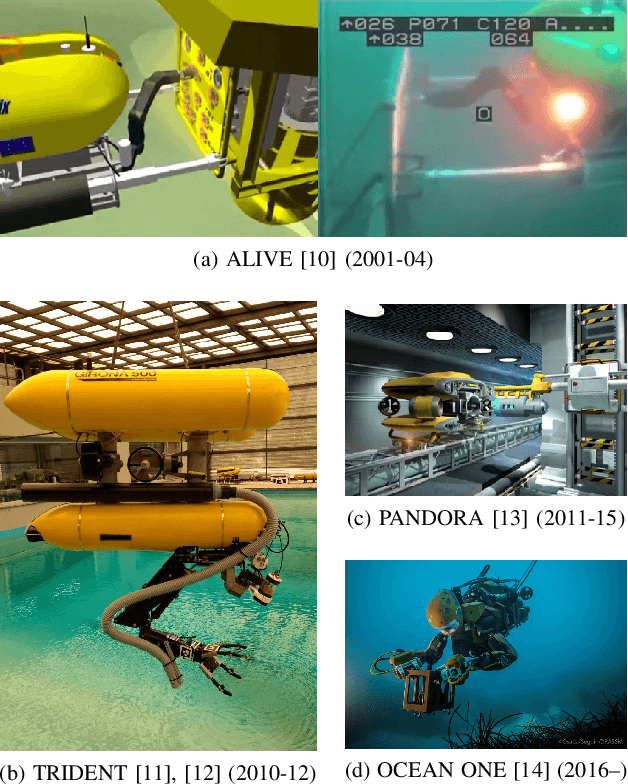

Underwater manipulation is one of the most remarkable ongoing research subjects in robotics. \acp{I-AUV} not only have to cope with the technical challenges associated with traditional manipulation tasks but do so while currents and waves perturb the stability of the vehicle, and low-light, turbid water conditions impede perceiving the surroundings. Certainly, the dynamic nature and our limited understanding of the marine environment hinder the autonomous performance of underwater robot manipulation. This manuscript provides a discussion on previous research and the limiting factors that impose on the long-envisioned prospects of autonomous underwater manipulation to finally highlight research directions that have the potential to improve the autonomy capabilities of I-AUV.
From market-ready ROVs to low-cost AUVs
Aug 12, 2021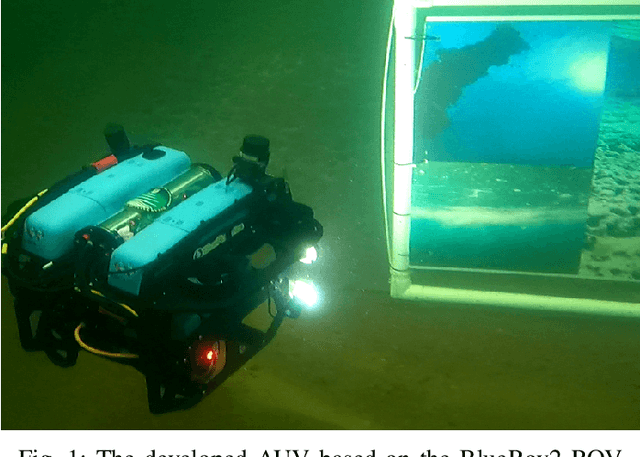
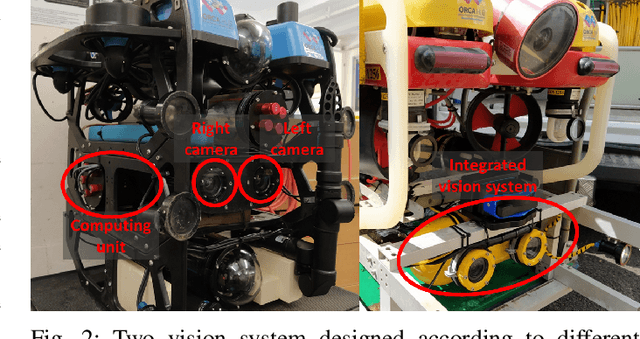
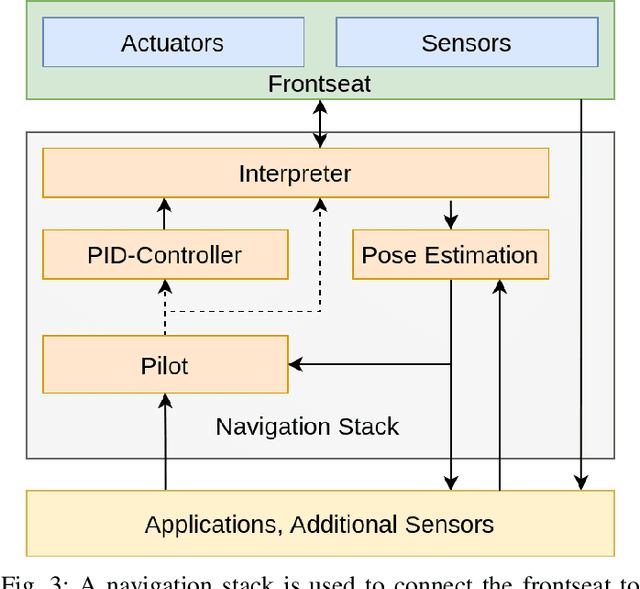
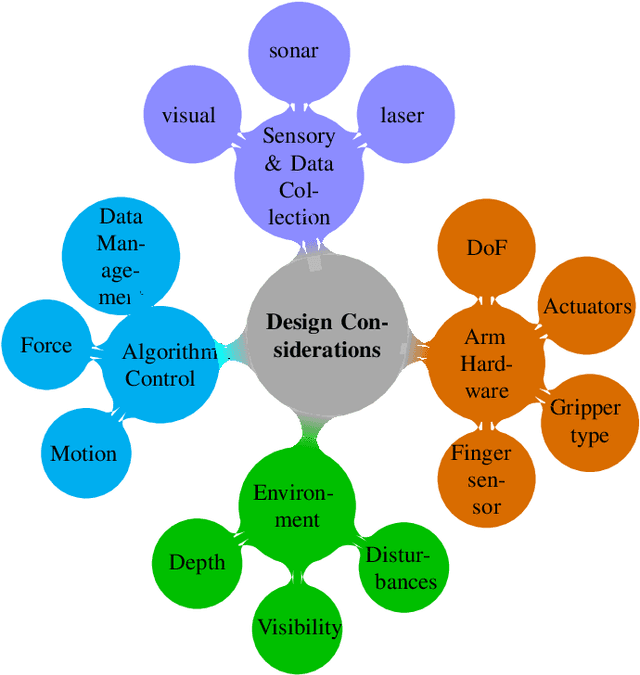
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.
Building Affordance Relations for Robotic Agents - A Review
May 14, 2021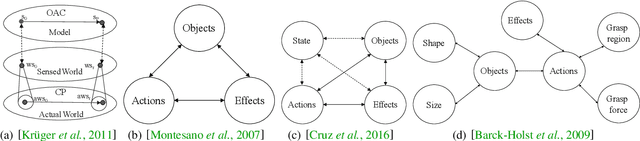

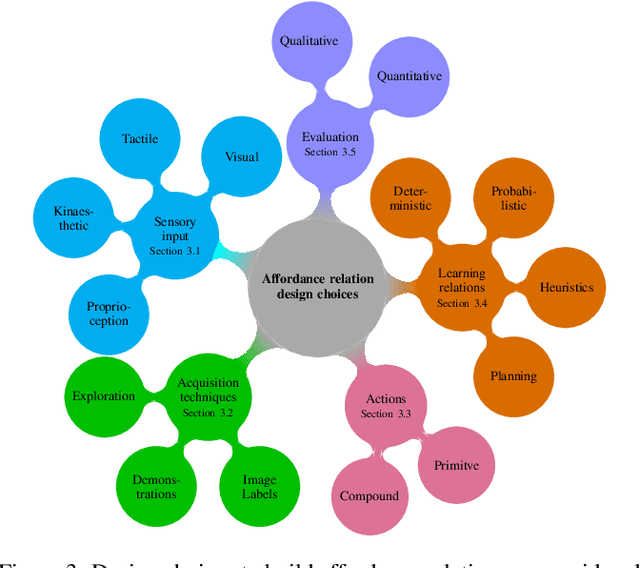
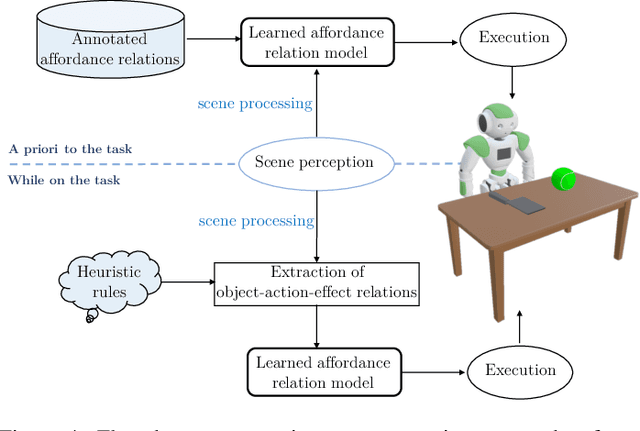
Affordances describe the possibilities for an agent to perform actions with an object. While the significance of the affordance concept has been previously studied from varied perspectives, such as psychology and cognitive science, these approaches are not always sufficient to enable direct transfer, in the sense of implementations, to artificial intelligence (AI)-based systems and robotics. However, many efforts have been made to pragmatically employ the concept of affordances, as it represents great potential for AI agents to effectively bridge perception to action. In this survey, we review and find common ground amongst different strategies that use the concept of affordances within robotic tasks, and build on these methods to provide guidance for including affordances as a mechanism to improve autonomy. To this end, we outline common design choices for building representations of affordance relations, and their implications on the generalisation capabilities of an agent when facing previously unseen scenarios. Finally, we identify and discuss a range of interesting research directions involving affordances that have the potential to improve the capabilities of an AI agent.
Path Planning for Manipulation using Experience-driven Random Trees
Feb 28, 2021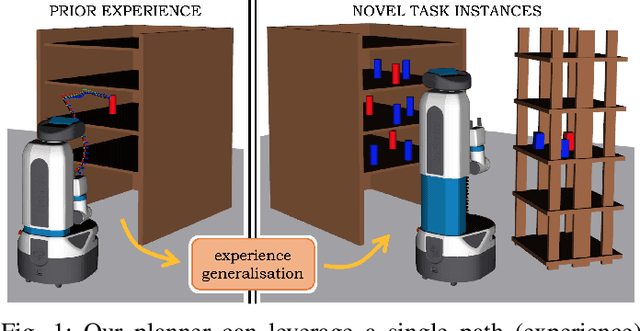
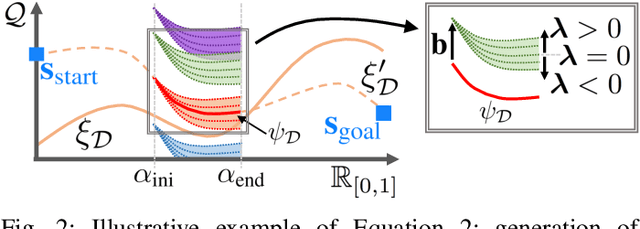

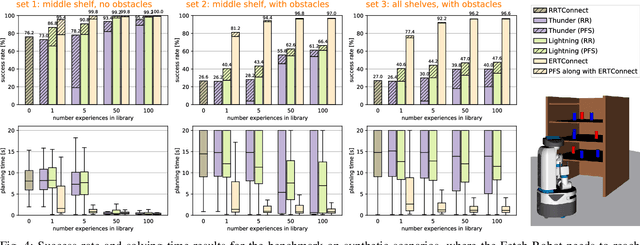
Robotic systems may frequently come across similar manipulation planning problems that result in similar motion plans. Instead of planning each problem from scratch, it is preferable to leverage previously computed motion plans, i.e., experiences, to ease the planning. Different approaches have been proposed to exploit prior information on novel task instances. These methods, however, rely on a vast repertoire of experiences and fail when none relates closely to the current problem. Thus, an open challenge is the ability to generalise prior experiences to task instances that do not necessarily resemble the prior. This work tackles the above challenge with the proposition that experiences are "decomposable" and "malleable", i.e., parts of an experience are suitable to relevantly explore the connectivity of the robot-task space even in non-experienced regions. Two new planners result from this insight: experience-driven random trees (ERT) and its bi-directional version ERTConnect. These planners adopt a tree sampling-based strategy that incrementally extracts and modulates parts of a single path experience to compose a valid motion plan. We demonstrate our method on task instances that significantly differ from the prior experiences, and compare with related state-of-the-art experience-based planners. While their repairing strategies fail to generalise priors of tens of experiences, our planner, with a single experience, significantly outperforms them in both success rate and planning time. Our planners are implemented and freely available in the Open Motion Planning Library.
Affordance-Aware Handovers with Human Arm Mobility Constraints
Oct 29, 2020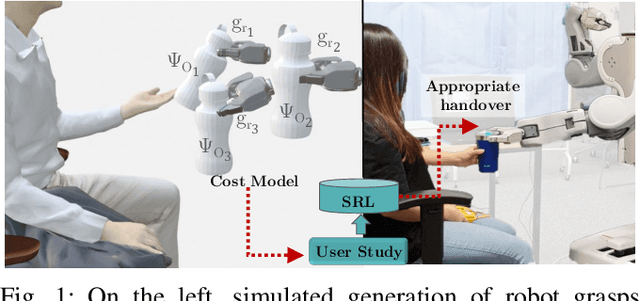
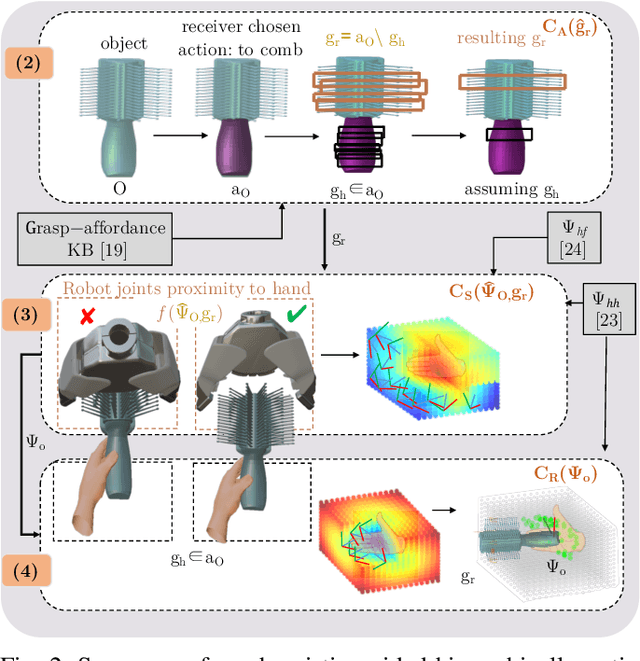
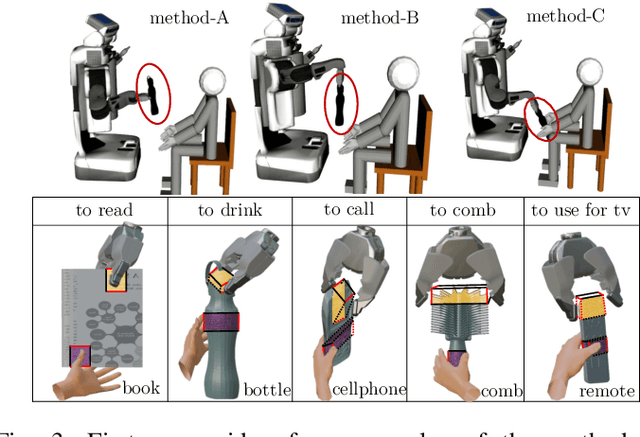
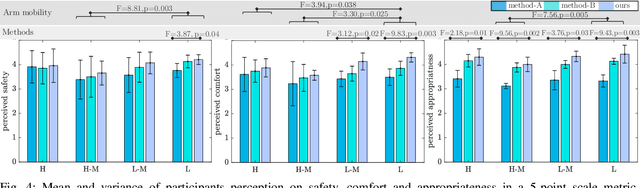
Reasoning about object handover configurations allows an assistive agent to estimate the appropriateness of handover for a receiver with different arm mobility capacities. While there are existing approaches to estimating the effectiveness of handovers, their findings are limited to users without arm mobility impairments and to specific objects. Therefore, current state-of-the-art approaches are unable to hand over novel objects to receivers with different arm mobility capacities. We propose a method that generalises handover behaviours to previously unseen objects, subject to the constraint of a user's arm mobility levels and the task context. We propose a heuristic-guided hierarchically optimised cost whose optimisation adapts object configurations for receivers with low arm mobility. This also ensures that the robot grasps consider the context of the user's upcoming task, i.e., the usage of the object. To understand preferences over handover configurations, we report on the findings of an online study, wherein we presented different handover methods, including ours, to $259$ users with different levels of arm mobility. We encapsulate these preferences in a SRL that is able to reason about the most suitable handover configuration given a receiver's arm mobility and upcoming task. We find that people's preferences over handover methods are correlated to their arm mobility capacities. In experiments with a PR2 robotic platform, we obtained an average handover accuracy of $90.8\%$ when generalising handovers to novel objects.
Self-Assessment of Grasp Affordance Transfer
Jul 04, 2020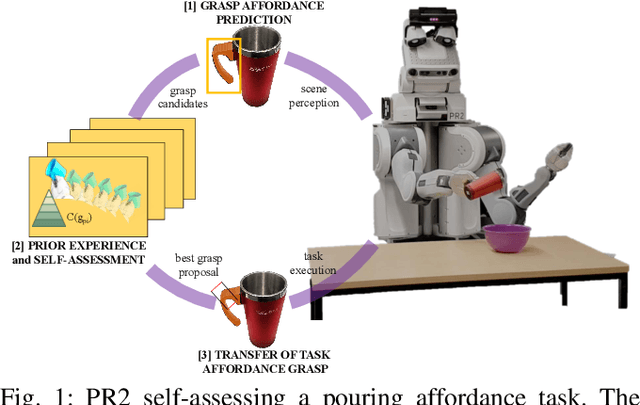
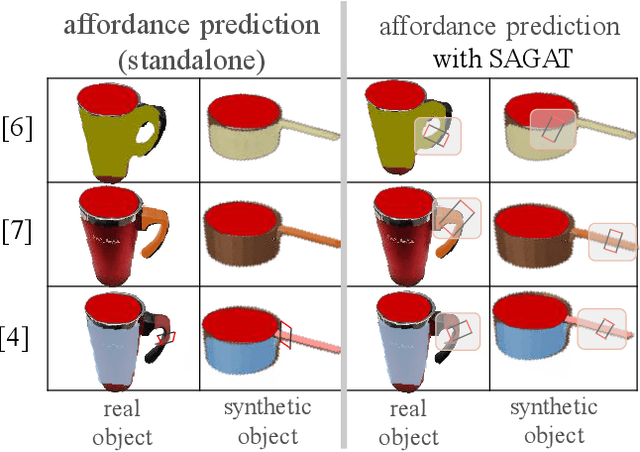
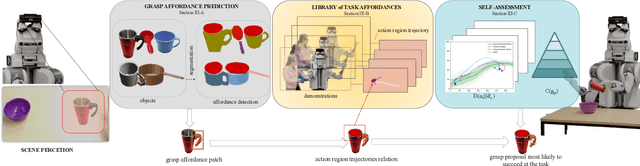
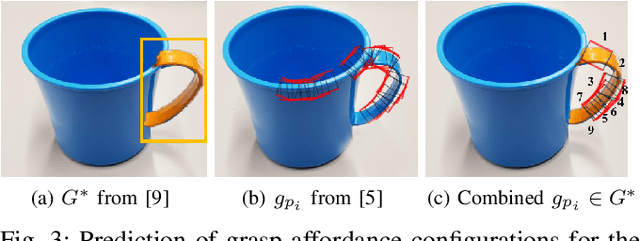
Reasoning about object grasp affordances allows an autonomous agent to estimate the most suitable grasp to execute a task. While current approaches for estimating grasp affordances are effective, their prediction is driven by hypotheses on visual features rather than an indicator of a proposal's suitability for an affordance task. Consequently, these works cannot guarantee any level of performance when executing a task and, in fact, not even ensure successful task completion. In this work, we present a pipeline for SAGAT based on prior experiences. We visually detect a grasp affordance region to extract multiple grasp affordance configuration candidates. Using these candidates, we forward simulate the outcome of executing the affordance task to analyse the relation between task outcome and grasp candidates. The relations are ranked by performance success with a heuristic confidence function and used to build a library of affordance task experiences. The library is later queried to perform one-shot transfer estimation of the best grasp configuration on new objects. Experimental evaluation shows that our method exhibits a significant performance improvement up to 11.7% against current state-of-the-art methods on grasp affordance detection. Experiments on a PR2 robotic platform demonstrate our method's highly reliable deployability to deal with real-world task affordance problems.
Online Mapping and Motion Planning under Uncertainty for Safe Navigation in Unknown Environments
May 26, 2020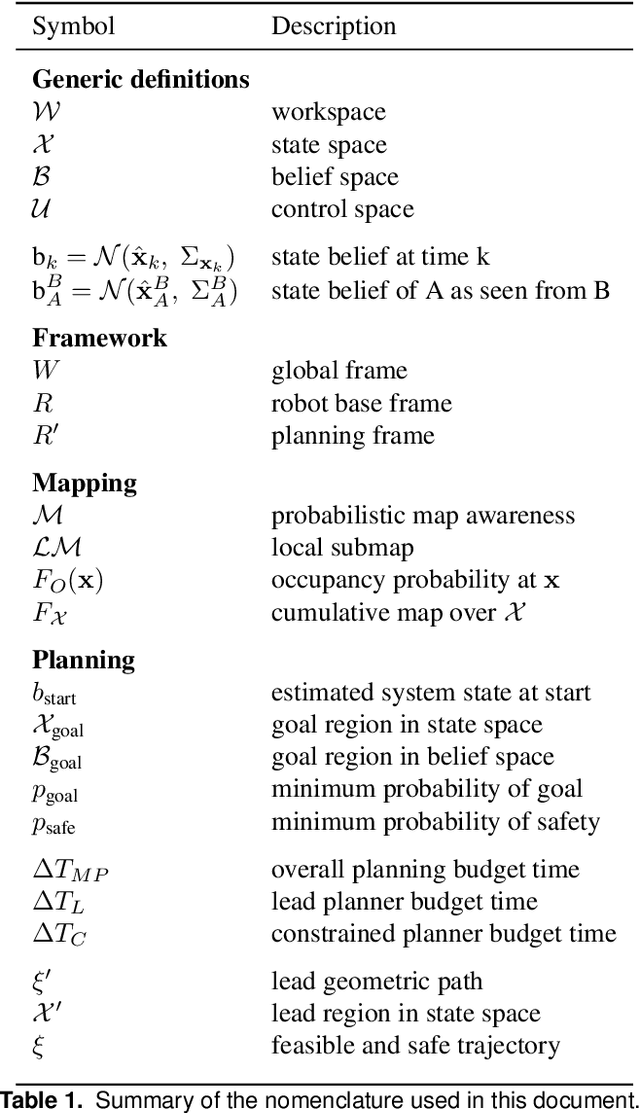
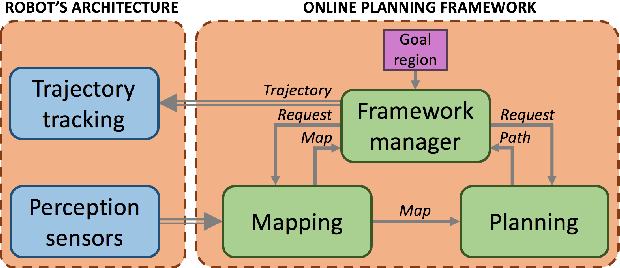
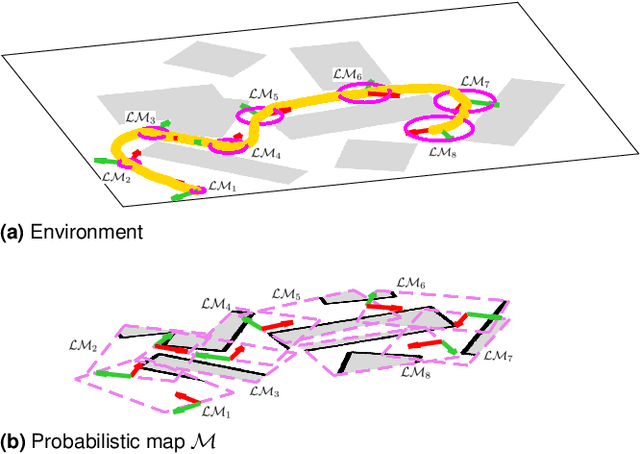
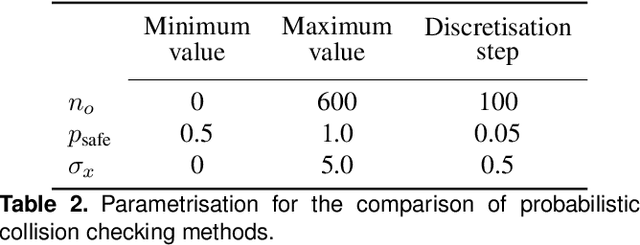
Safe autonomous navigation is an essential and challenging problem for robots operating in highly unstructured or completely unknown environments. Under these conditions, not only robotic systems must deal with limited localisation information, but also their manoeuvrability is constrained by their dynamics and often suffer from uncertainty. In order to cope with these constraints, this manuscript proposes an uncertainty-based framework for mapping and planning feasible motions online with probabilistic safety-guarantees. The proposed approach deals with the motion, probabilistic safety, and online computation constraints by: (i) incrementally mapping the surroundings to build an uncertainty-aware representation of the environment, and (ii) iteratively (re)planning trajectories to goal that are kinodynamically feasible and probabilistically safe through a multi-layered sampling-based planner in the belief space. In-depth empirical analyses illustrate some important properties of this approach, namely, (a) the multi-layered planning strategy enables rapid exploration of the high-dimensional belief space while preserving asymptotic optimality and completeness guarantees, and (b) the proposed routine for probabilistic collision checking results in tighter probability bounds in comparison to other uncertainty-aware planners in the literature. Furthermore, real-world in-water experimental evaluation on a non-holonomic torpedo-shaped autonomous underwater vehicle and simulated trials in the Stairwell scenario of the DARPA Subterranean Challenge 2019 on a quadrotor unmanned aerial vehicle demonstrate the efficacy of the method as well as its suitability for systems with limited on-board computational power.
Affordances in Robotic Tasks -- A Survey
Apr 15, 2020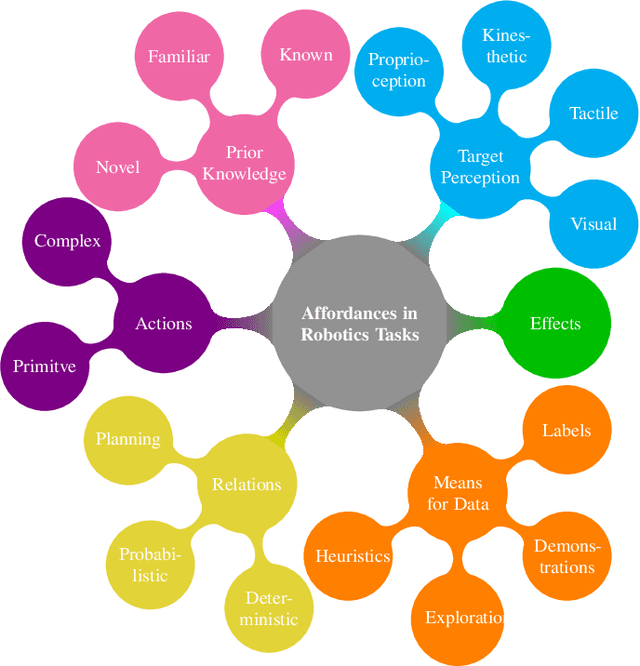
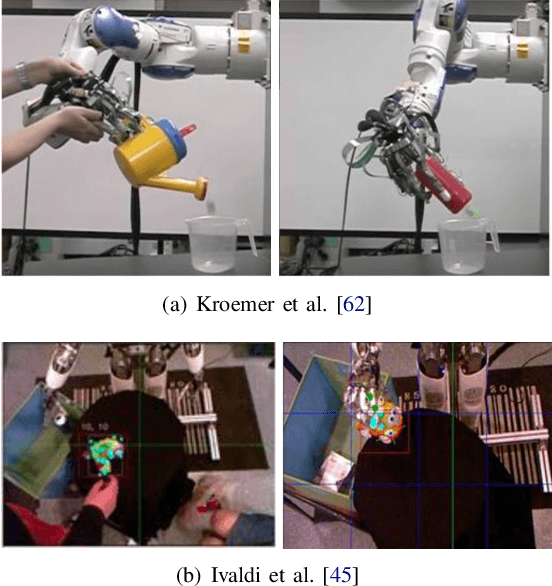
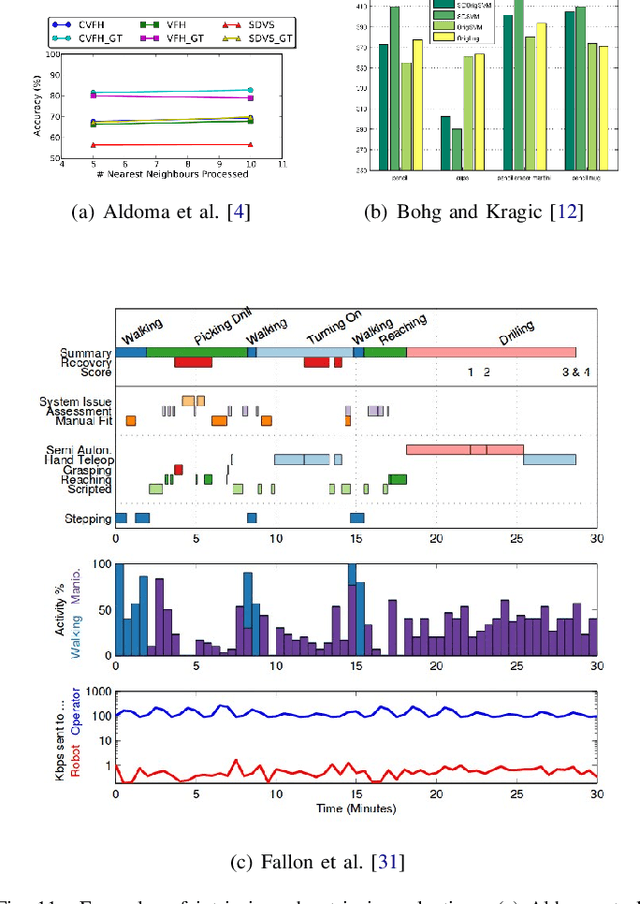
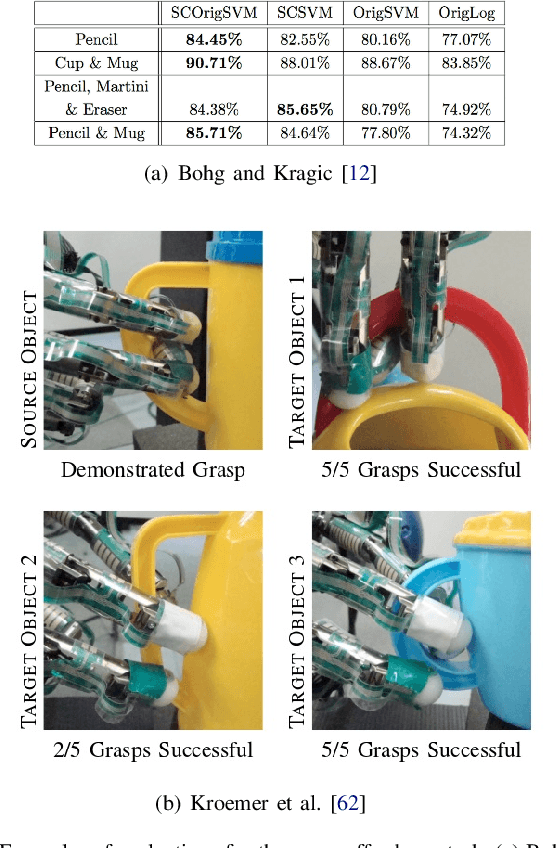
Affordances are key attributes of what must be perceived by an autonomous robotic agent in order to effectively interact with novel objects. Historically, the concept derives from the literature in psychology and cognitive science, where affordances are discussed in a way that makes it hard for the definition to be directly transferred to computational specifications useful for robots. This review article is focused specifically on robotics, so we discuss the related literature from this perspective. In this survey, we classify the literature and try to find common ground amongst different approaches with a view to application in robotics. We propose a categorisation based on the level of prior knowledge that is assumed to build the relationship among different affordance components that matter for a particular robotic task. We also identify areas for future improvement and discuss possible directions that are likely to be fruitful in terms of impact on robotics practice.