 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom market-ready ROVs to low-cost AUVs
Aug 12, 2021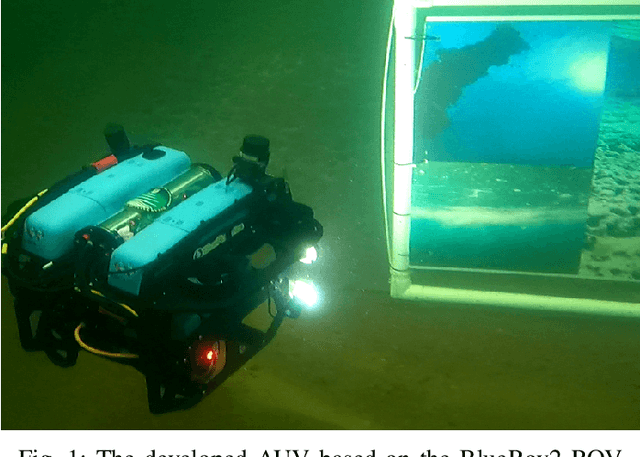
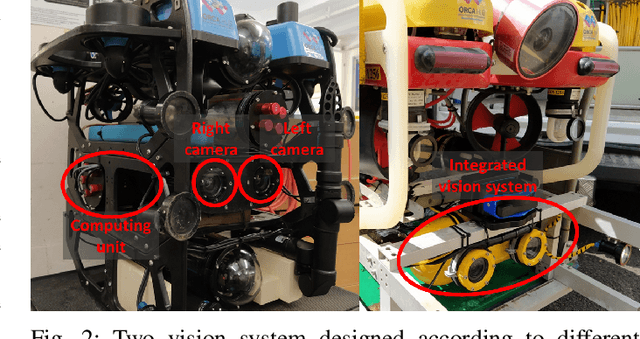
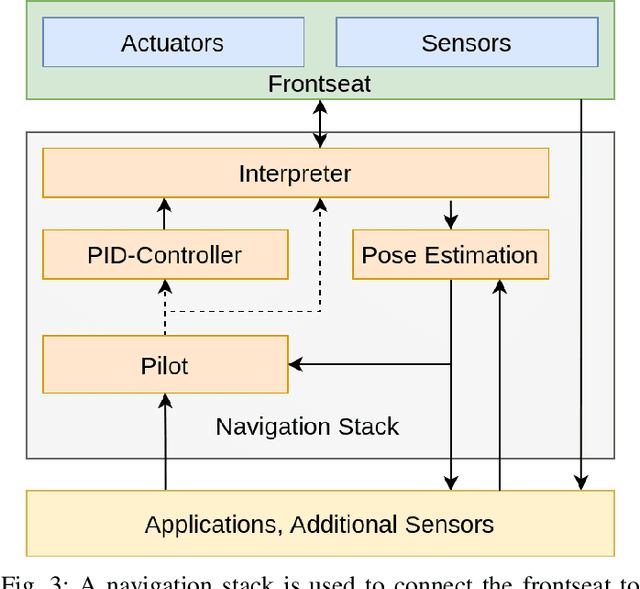
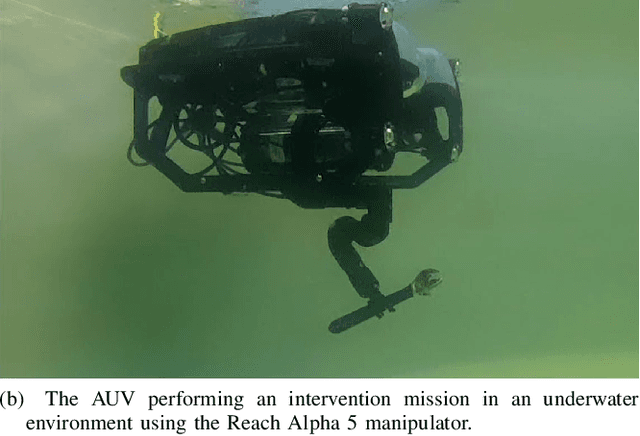
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.
Underwater Image Haze Removal and Color Correction with an Underwater-ready Dark Channel Prior
Jul 11, 2018
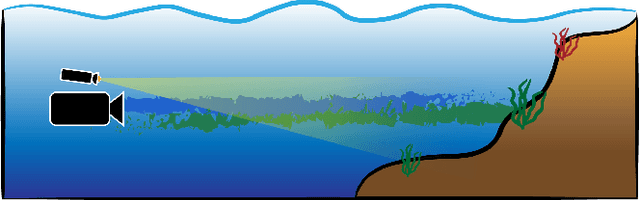
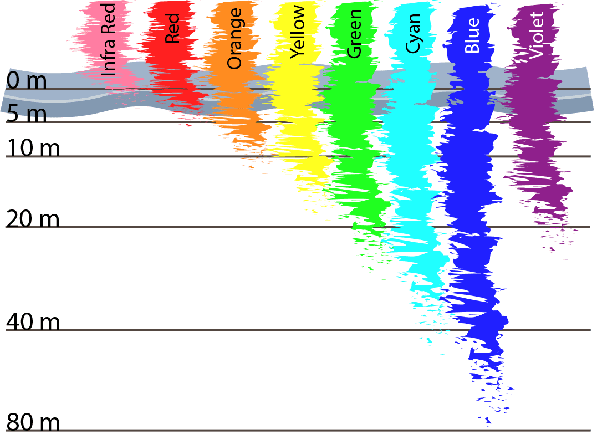
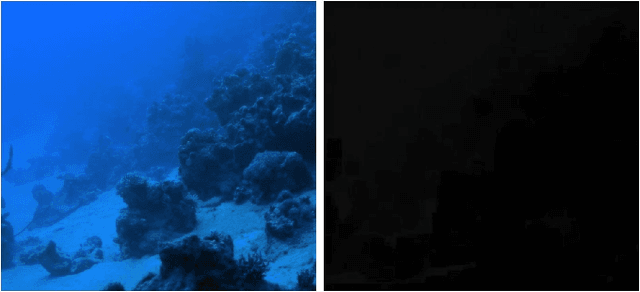
Underwater images suffer from extremely unfavourable conditions. Light is heavily attenuated and scattered. Attenuation creates change in hue, scattering causes so called veiling light. General state of the art methods for enhancing image quality are either unreliable or cannot be easily used in underwater operations. On the other hand there is a well known method for haze removal in air, called Dark Channel Prior. Even though there are known adaptations of this method to underwater applications, they do not always work correctly. This work elaborates and improves upon the initial concept presented in [1]. A modification to the Dark Channel Prior is proposed that allows for an easy application to underwater images. It is also shown that our method outperforms competing solutions based on the Dark Channel Prior. Experiments on real-life data collected within the DexROV project are also presented, showing the robustness and high performance of the proposed algorithm.