 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Planning with Incomplete Knowledge and Perceptual Information
Jul 20, 2022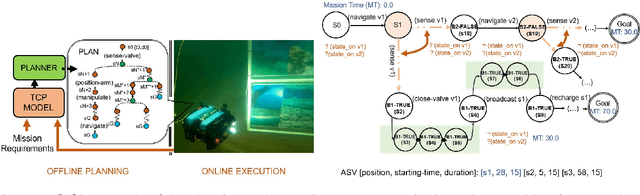

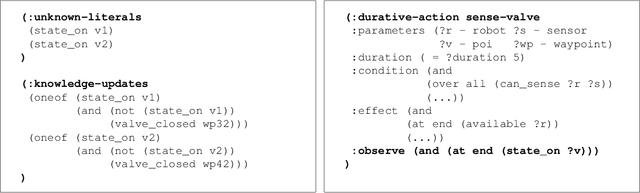
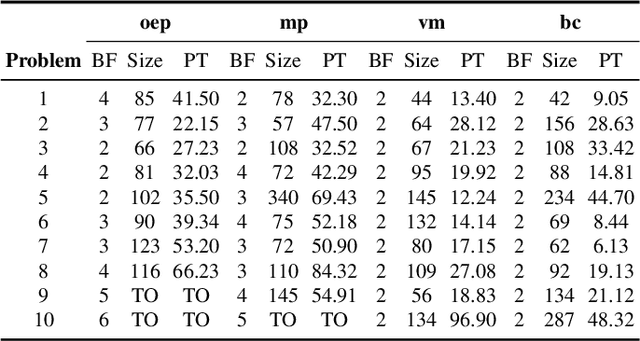
In real-world applications, the ability to reason about incomplete knowledge, sensing, temporal notions, and numeric constraints is vital. While several AI planners are capable of dealing with some of these requirements, they are mostly limited to problems with specific types of constraints. This paper presents a new planning approach that combines contingent plan construction within a temporal planning framework, offering solutions that consider numeric constraints and incomplete knowledge. We propose a small extension to the Planning Domain Definition Language (PDDL) to model (i) incomplete, (ii) knowledge sensing actions that operate over unknown propositions, and (iii) possible outcomes from non-deterministic sensing effects. We also introduce a new set of planning domains to evaluate our solver, which has shown good performance on a variety of problems.
* In Proceedings AREA 2022, arXiv:2207.09058
From market-ready ROVs to low-cost AUVs
Aug 12, 2021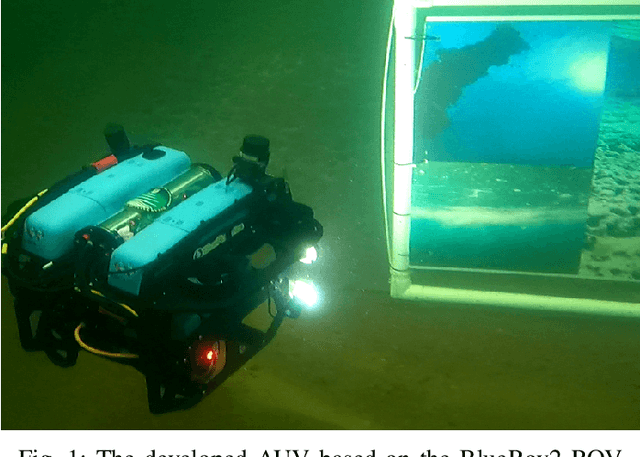
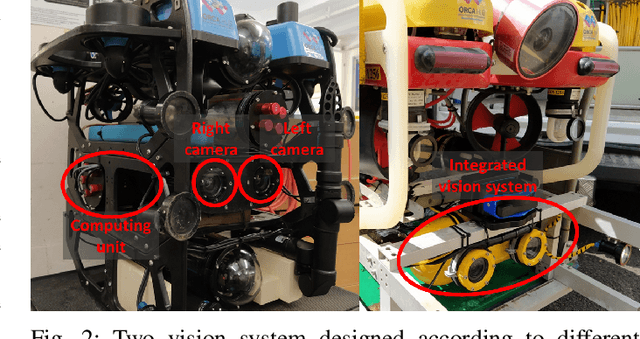
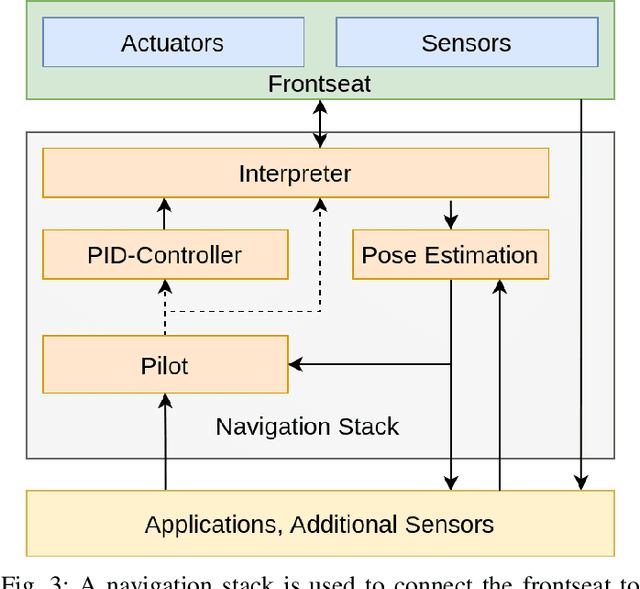
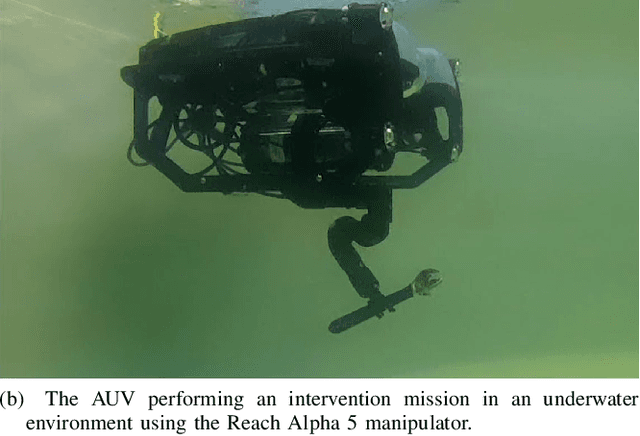
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.