 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNAS-GS: Noise-Aware Sonar Gaussian Splatting
Jan 09, 2026Underwater sonar imaging plays a crucial role in various applications, including autonomous navigation in murky water, marine archaeology, and environmental monitoring. However, the unique characteristics of sonar images, such as complex noise patterns and the lack of elevation information, pose significant challenges for 3D reconstruction and novel view synthesis. In this paper, we present NAS-GS, a novel Noise-Aware Sonar Gaussian Splatting framework specifically designed to address these challenges. Our approach introduces a Two-Ways Splatting technique that accurately models the dual directions for intensity accumulation and transmittance calculation inherent in sonar imaging, significantly improving rendering speed without sacrificing quality. Moreover, we propose a Gaussian Mixture Model (GMM) based noise model that captures complex sonar noise patterns, including side-lobes, speckle, and multi-path noise. This model enhances the realism of synthesized images while preventing 3D Gaussian overfitting to noise, thereby improving reconstruction accuracy. We demonstrate state-of-the-art performance on both simulated and real-world large-scale offshore sonar scenarios, achieving superior results in novel view synthesis and 3D reconstruction.
Digital Beamforming Enhanced Radar Odometry
Mar 17, 2025Radar has become an essential sensor for autonomous navigation, especially in challenging environments where camera and LiDAR sensors fail. 4D single-chip millimeter-wave radar systems, in particular, have drawn increasing attention thanks to their ability to provide spatial and Doppler information with low hardware cost and power consumption. However, most single-chip radar systems using traditional signal processing, such as Fast Fourier Transform, suffer from limited spatial resolution in radar detection, significantly limiting the performance of radar-based odometry and Simultaneous Localization and Mapping (SLAM) systems. In this paper, we develop a novel radar signal processing pipeline that integrates spatial domain beamforming techniques, and extend it to 3D Direction of Arrival estimation. Experiments using public datasets are conducted to evaluate and compare the performance of our proposed signal processing pipeline against traditional methodologies. These tests specifically focus on assessing structural precision across diverse scenes and measuring odometry accuracy in different radar odometry systems. This research demonstrates the feasibility of achieving more accurate radar odometry by simply replacing the standard FFT-based processing with the proposed pipeline. The codes are available at GitHub*.
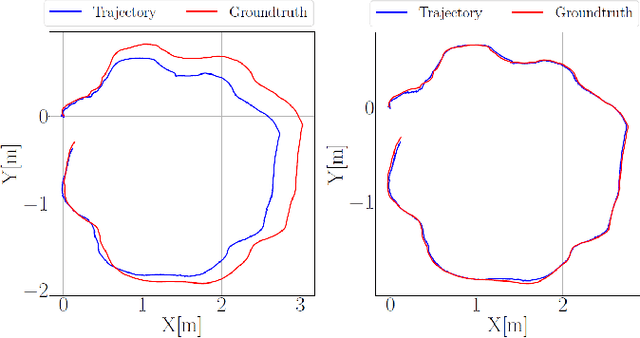
AQUA-SLAM: Tightly-Coupled Underwater Acoustic-Visual-Inertial SLAM with Sensor Calibration
Mar 14, 2025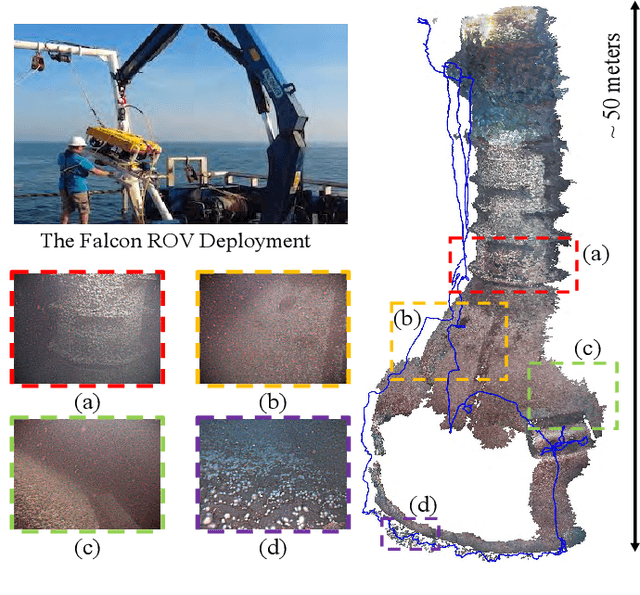


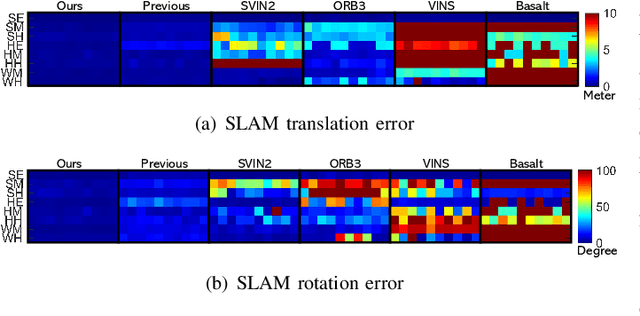
Underwater environments pose significant challenges for visual Simultaneous Localization and Mapping (SLAM) systems due to limited visibility, inadequate illumination, and sporadic loss of structural features in images. Addressing these challenges, this paper introduces a novel, tightly-coupled Acoustic-Visual-Inertial SLAM approach, termed AQUA-SLAM, to fuse a Doppler Velocity Log (DVL), a stereo camera, and an Inertial Measurement Unit (IMU) within a graph optimization framework. Moreover, we propose an efficient sensor calibration technique, encompassing multi-sensor extrinsic calibration (among the DVL, camera and IMU) and DVL transducer misalignment calibration, with a fast linear approximation procedure for real-time online execution. The proposed methods are extensively evaluated in a tank environment with ground truth, and validated for offshore applications in the North Sea. The results demonstrate that our method surpasses current state-of-the-art underwater and visual-inertial SLAM systems in terms of localization accuracy and robustness. The proposed system will be made open-source for the community.
CURL: Continuous, Ultra-compact Representation for LiDAR
May 12, 2022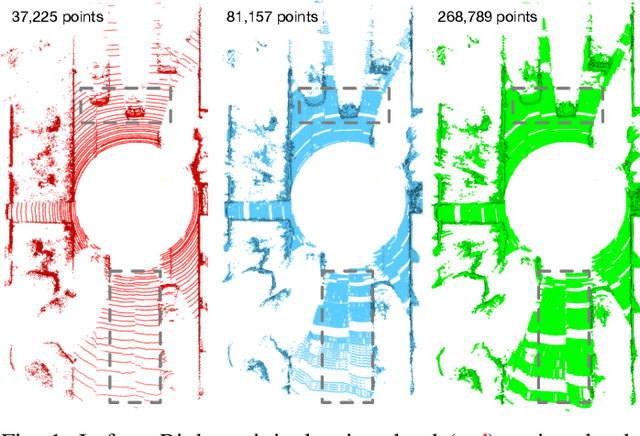
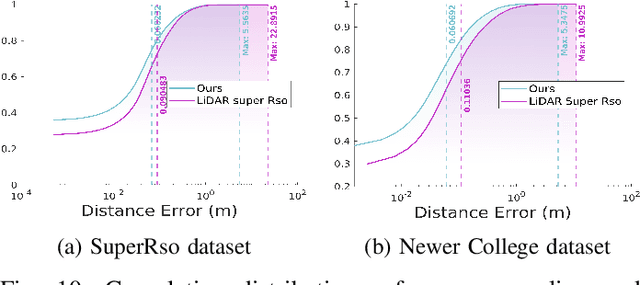
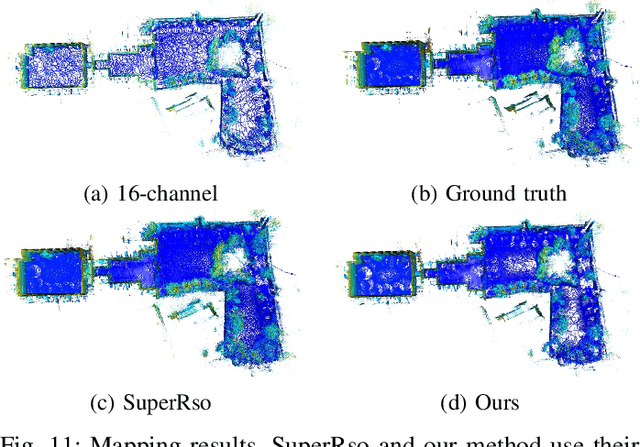
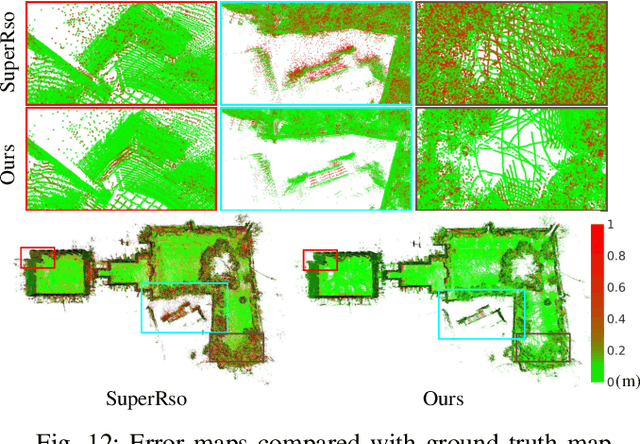
Increasing the density of the 3D LiDAR point cloud is appealing for many applications in robotics. However, high-density LiDAR sensors are usually costly and still limited to a level of coverage per scan (e.g., 128 channels). Meanwhile, denser point cloud scans and maps mean larger volumes to store and longer times to transmit. Existing works focus on either improving point cloud density or compressing its size. This paper aims to design a novel 3D point cloud representation that can continuously increase point cloud density while reducing its storage and transmitting size. The pipeline of the proposed Continuous, Ultra-compact Representation of LiDAR (CURL) includes four main steps: meshing, upsampling, encoding, and continuous reconstruction. It is capable of transforming a 3D LiDAR scan or map into a compact spherical harmonics representation which can be used or transmitted in low latency to continuously reconstruct a much denser 3D point cloud. Extensive experiments on four public datasets, covering college gardens, city streets, and indoor rooms, demonstrate that much denser 3D point clouds can be accurately reconstructed using the proposed CURL representation while achieving up to 80% storage space-saving. We open-source the CURL codes for the community.
From market-ready ROVs to low-cost AUVs
Aug 12, 2021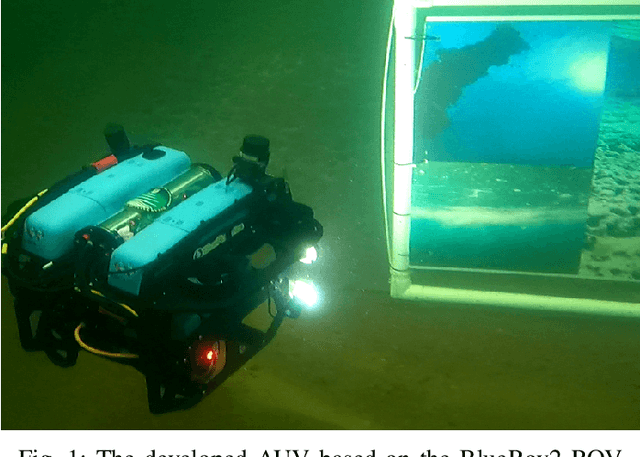
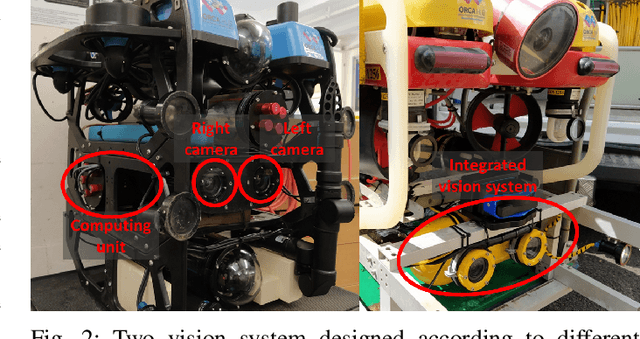
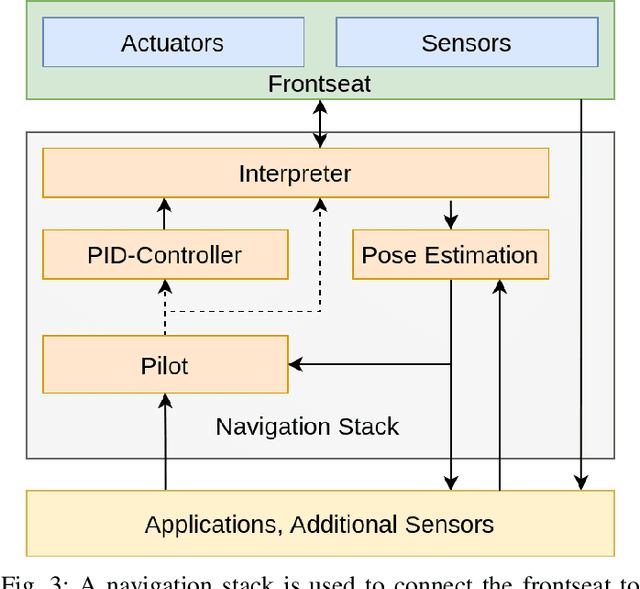
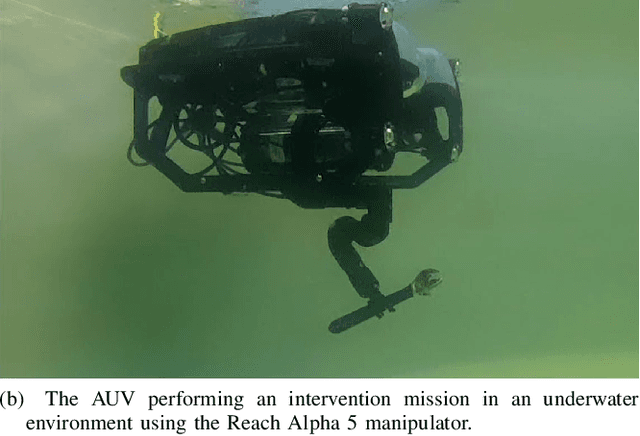
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.
Underwater inspection and intervention dataset
Jul 28, 2021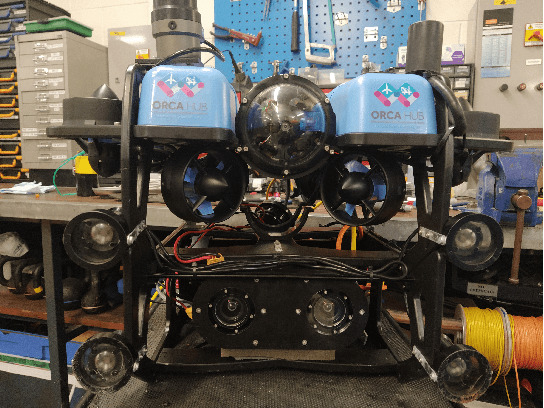
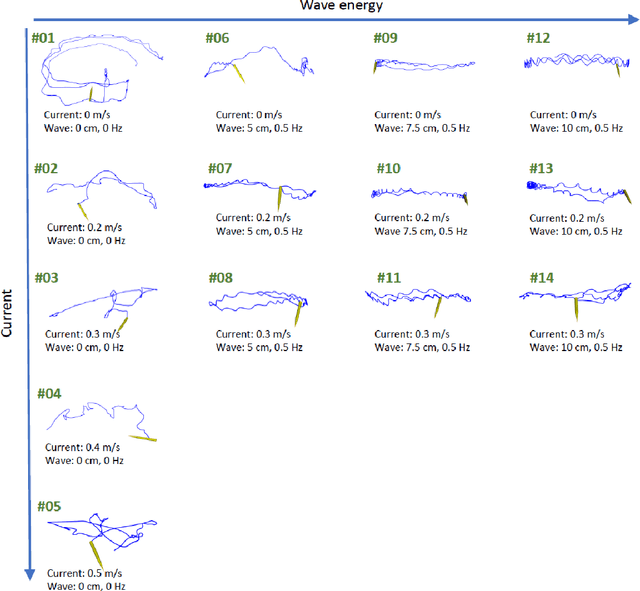
This paper presents a novel dataset for the development of visual navigation and simultaneous localisation and mapping (SLAM) algorithms as well as for underwater intervention tasks. It differs from existing datasets as it contains ground truth for the vehicle's position captured by an underwater motion tracking system. The dataset contains distortion-free and rectified stereo images along with the calibration parameters of the stereo camera setup. Furthermore, the experiments were performed and recorded in a controlled environment, where current and waves could be generated allowing the dataset to cover a wide range of conditions - from calm water to waves and currents of significant strength.