 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsSo3D: Inertial Navigation System and 3D Sonar SLAM for turbid environment inspection
Jan 09, 2026This paper presents InsSo3D, an accurate and efficient method for large-scale 3D Simultaneous Localisation and Mapping (SLAM) using a 3D Sonar and an Inertial Navigation System (INS). Unlike traditional sonar, which produces 2D images containing range and azimuth information but lacks elevation information, 3D Sonar produces a 3D point cloud, which therefore does not suffer from elevation ambiguity. We introduce a robust and modern SLAM framework adapted to the 3D Sonar data using INS as prior, detecting loop closure and performing pose graph optimisation. We evaluated InsSo3D performance inside a test tank with access to ground truth data and in an outdoor flooded quarry. Comparisons to reference trajectories and maps obtained from an underwater motion tracking system and visual Structure From Motion (SFM) demonstrate that InsSo3D efficiently corrects odometry drift. The average trajectory error is below 21cm during a 50-minute-long mission, producing a map of 10m by 20m with a 9cm average reconstruction error, enabling safe inspection of natural or artificial underwater structures even in murky water conditions.
NAS-GS: Noise-Aware Sonar Gaussian Splatting
Jan 09, 2026Underwater sonar imaging plays a crucial role in various applications, including autonomous navigation in murky water, marine archaeology, and environmental monitoring. However, the unique characteristics of sonar images, such as complex noise patterns and the lack of elevation information, pose significant challenges for 3D reconstruction and novel view synthesis. In this paper, we present NAS-GS, a novel Noise-Aware Sonar Gaussian Splatting framework specifically designed to address these challenges. Our approach introduces a Two-Ways Splatting technique that accurately models the dual directions for intensity accumulation and transmittance calculation inherent in sonar imaging, significantly improving rendering speed without sacrificing quality. Moreover, we propose a Gaussian Mixture Model (GMM) based noise model that captures complex sonar noise patterns, including side-lobes, speckle, and multi-path noise. This model enhances the realism of synthesized images while preventing 3D Gaussian overfitting to noise, thereby improving reconstruction accuracy. We demonstrate state-of-the-art performance on both simulated and real-world large-scale offshore sonar scenarios, achieving superior results in novel view synthesis and 3D reconstruction.
VISO: Robust Underwater Visual-Inertial-Sonar SLAM with Photometric Rendering for Dense 3D Reconstruction
Jan 03, 2026Visual challenges in underwater environments significantly hinder the accuracy of vision-based localisation and the high-fidelity dense reconstruction. In this paper, we propose VISO, a robust underwater SLAM system that fuses a stereo camera, an inertial measurement unit (IMU), and a 3D sonar to achieve accurate 6-DoF localisation and enable efficient dense 3D reconstruction with high photometric fidelity. We introduce a coarse-to-fine online calibration approach for extrinsic parameters estimation between the 3D sonar and the camera. Additionally, a photometric rendering strategy is proposed for the 3D sonar point cloud to enrich the sonar map with visual information. Extensive experiments in a laboratory tank and an open lake demonstrate that VISO surpasses current state-of-the-art underwater and visual-based SLAM algorithms in terms of localisation robustness and accuracy, while also exhibiting real-time dense 3D reconstruction performance comparable to the offline dense mapping method.
From market-ready ROVs to low-cost AUVs
Aug 12, 2021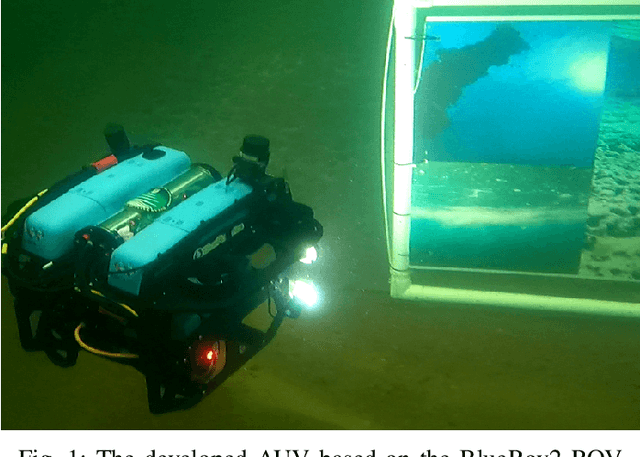
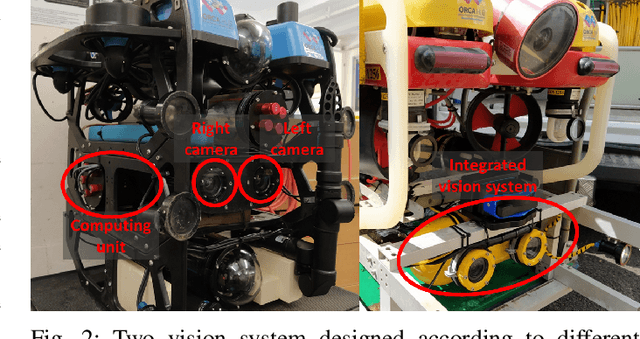
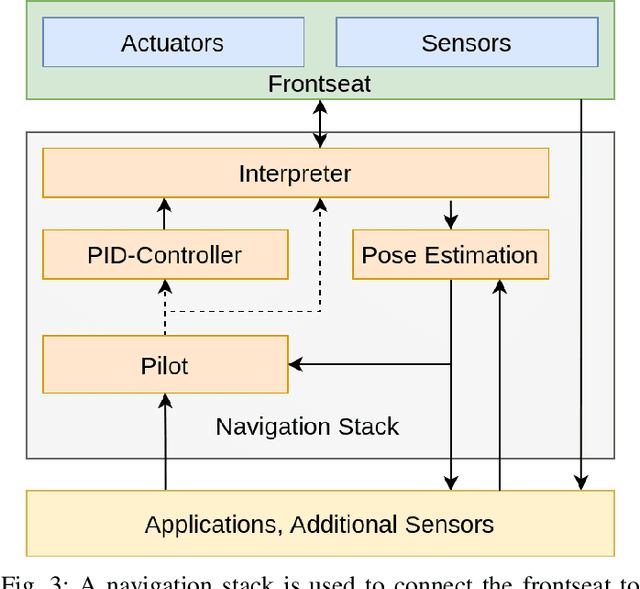
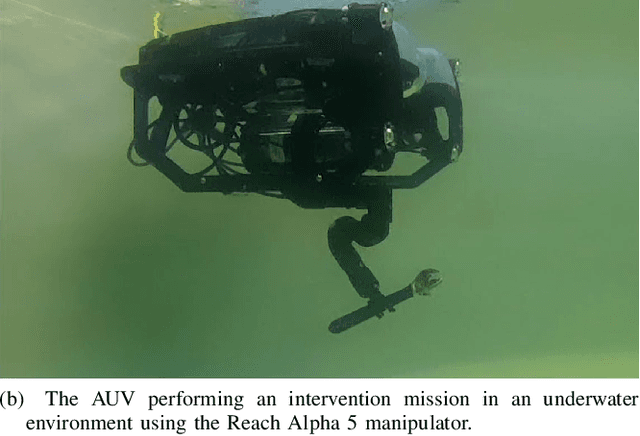
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.
Underwater inspection and intervention dataset
Jul 28, 2021
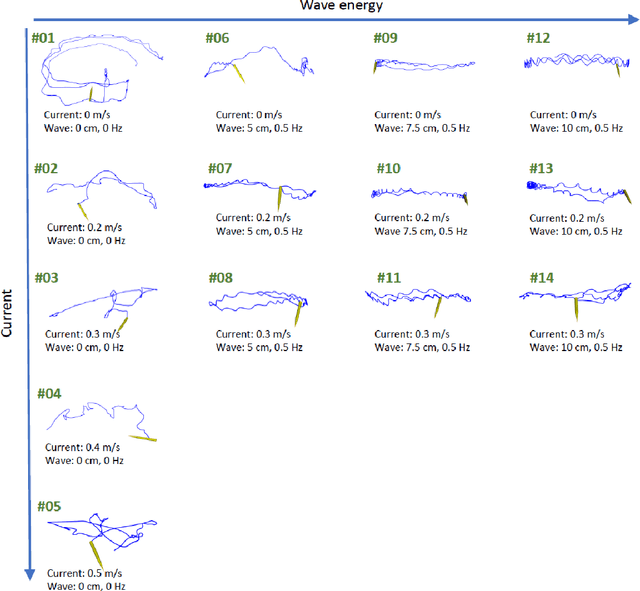
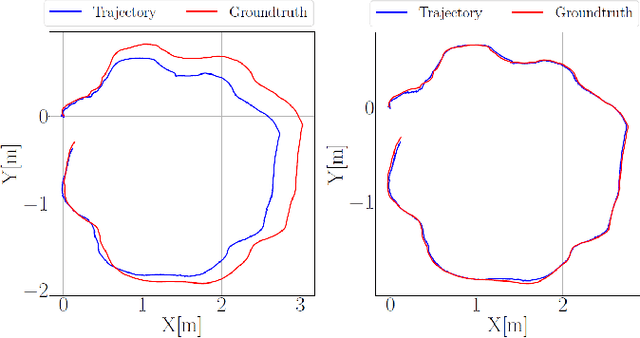
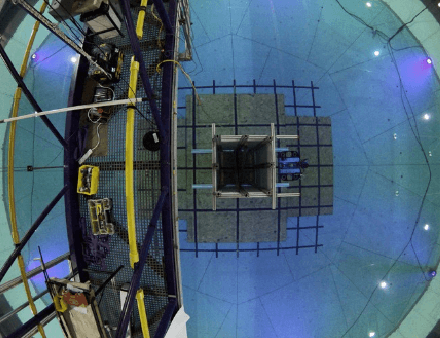
This paper presents a novel dataset for the development of visual navigation and simultaneous localisation and mapping (SLAM) algorithms as well as for underwater intervention tasks. It differs from existing datasets as it contains ground truth for the vehicle's position captured by an underwater motion tracking system. The dataset contains distortion-free and rectified stereo images along with the calibration parameters of the stereo camera setup. Furthermore, the experiments were performed and recorded in a controlled environment, where current and waves could be generated allowing the dataset to cover a wide range of conditions - from calm water to waves and currents of significant strength.