 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNext-generation perception system for automated defects detection in composite laminates via polarized computational imaging
Aug 24, 2021

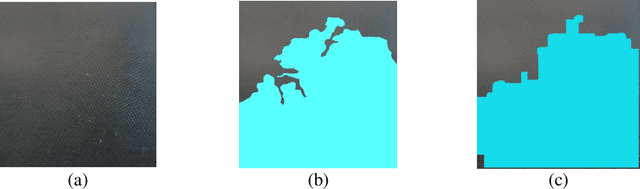

Finishing operations on large-scale composite components like wind turbine blades, including trimming and sanding, often require multiple workers and part repositioning. In the composites manufacturing industry, automation of such processes is challenging, as manufactured part geometry may be inconsistent and task completion is based on human judgment and experience. Implementing a mobile, collaborative robotic system capable of performing finishing tasks in dynamic and uncertain environments would improve quality and lower manufacturing costs. To complete the given tasks, the collaborative robotic team must properly understand the environment and detect irregularities in the manufactured parts. In this paper, we describe the initial implementation and demonstration of a polarized computational imaging system to identify defects in composite laminates. As the polarimetric images are highly relevant to the surface micro-geometry, they can be used to detect surface defects that are not visible in conventional color images. The proposed vision system successfully identifies defect types and surface characteristics (e.g., pinholes, voids, scratches, resin flash) for different glass fiber and carbon fiber laminates.
From market-ready ROVs to low-cost AUVs
Aug 12, 2021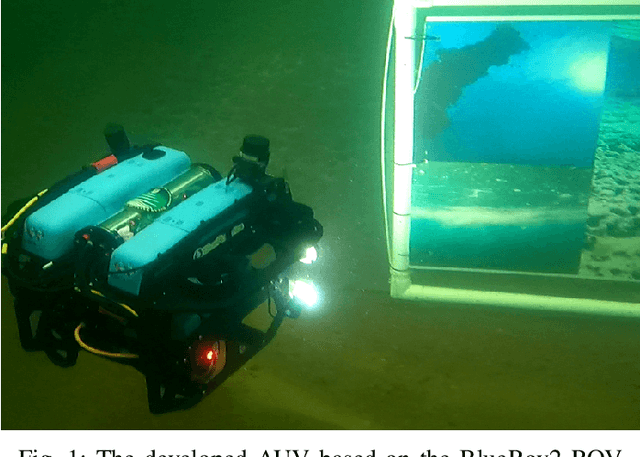
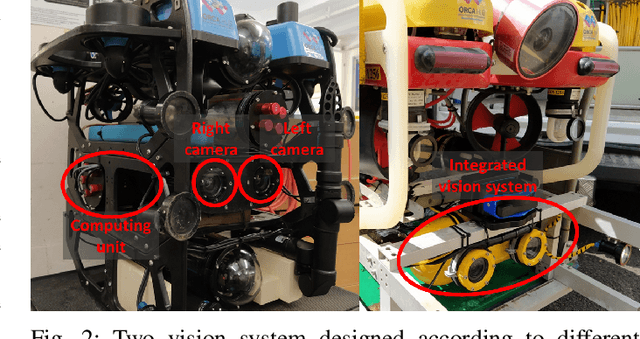
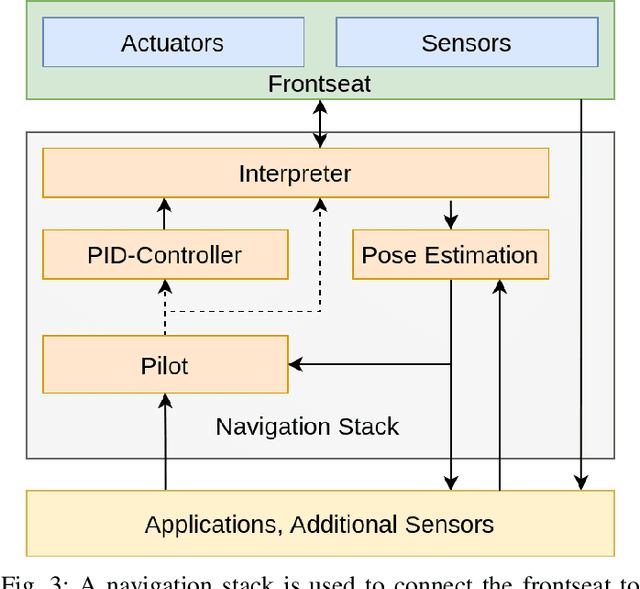
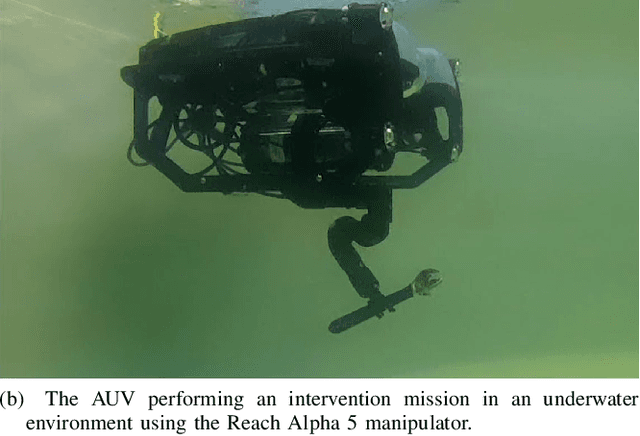
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.