 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Syllogistic Probe: Tracing the Evolution of Logic Reasoning in Large Language Models
Jan 24, 2026Human logic has gradually shifted from intuition-driven inference to rigorous formal systems. Motivated by recent advances in large language models (LLMs), we explore whether LLMs exhibit a similar evolution in the underlying logical framework. Using existential import as a probe, we for evaluate syllogism under traditional and modern logic. Through extensive experiments of testing SOTA LLMs on a new syllogism dataset, we have some interesting findings: (i) Model size scaling promotes the shift toward modern logic; (ii) Thinking serves as an efficient accelerator beyond parameter scaling; (iii) the Base model plays a crucial role in determining how easily and stably this shift can emerge. Beyond these core factors, we conduct additional experiments for in-depth analysis of properties of current LLMs on syllogistic reasoning.
Parallelism and Generation Order in Masked Diffusion Language Models: Limits Today, Potential Tomorrow
Jan 22, 2026Masked Diffusion Language Models (MDLMs) promise parallel token generation and arbitrary-order decoding, yet it remains unclear to what extent current models truly realize these capabilities. We characterize MDLM behavior along two dimensions -- parallelism strength and generation order -- using Average Finalization Parallelism (AFP) and Kendall's tau. We evaluate eight mainstream MDLMs (up to 100B parameters) on 58 benchmarks spanning knowledge, reasoning, and programming. The results show that MDLMs still lag behind comparably sized autoregressive models, mainly because parallel probabilistic modeling weakens inter-token dependencies. Meanwhile, MDLMs exhibit adaptive decoding behavior: their parallelism and generation order vary significantly with the task domain, the stage of reasoning, and whether the output is correct. On tasks that require "backward information" (e.g., Sudoku), MDLMs adopt a solution order that tends to fill easier Sudoku blanks first, highlighting their advantages. Finally, we provide theoretical motivation and design insights supporting a Generate-then-Edit paradigm, which mitigates dependency loss while retaining the efficiency of parallel decoding.
Underwater 3D Reconstruction Using Light Fields
Sep 05, 2021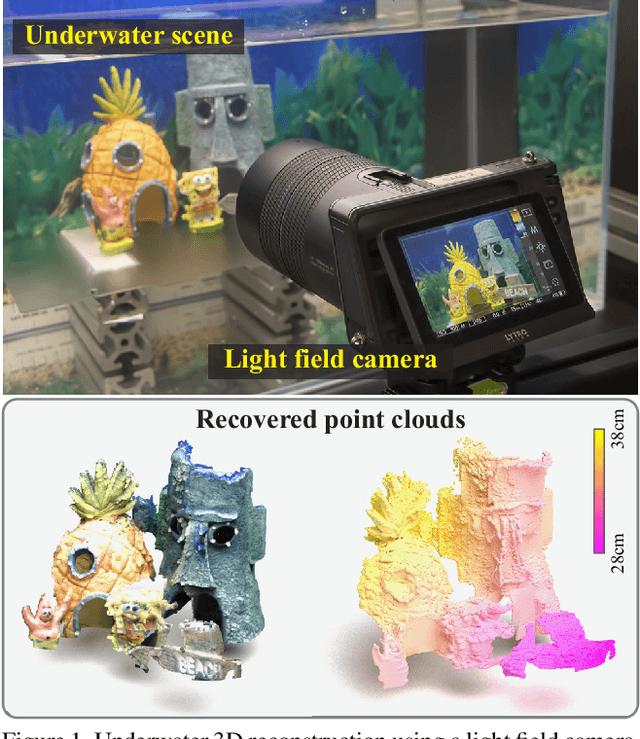
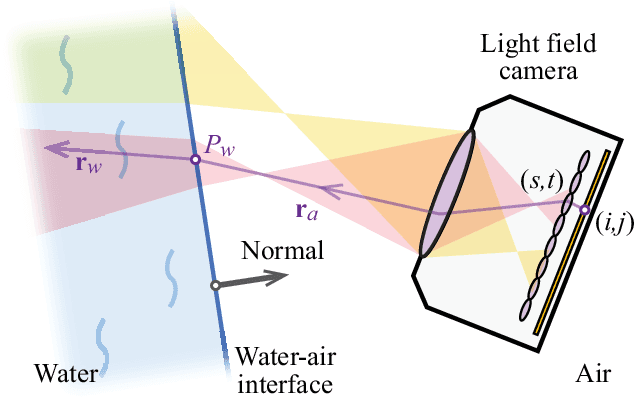
Underwater 3D reconstruction is challenging due to the refraction of light at the water-air interface (most electronic devices cannot be directly submerged in water). In this paper, we present an underwater 3D reconstruction solution using light field cameras. We first develop a light field camera calibration algorithm that simultaneously estimates the camera parameters and the geometry of the water-air interface. We then design a novel depth estimation algorithm for 3D reconstruction. Specifically, we match correspondences on curved epipolar lines caused by water refraction. We also observe that the view-dependent specular reflection is very weak in the underwater environment, resulting the angularly sampled rays in light field has uniform intensity. We therefore propose an angular uniformity constraint for depth optimization. We also develop a fast algorithm for locating the angular patches in presence of non-linear light paths. Extensive synthetic and real experiments demonstrate that our method can perform underwater 3D reconstruction with high accuracy.
Next-generation perception system for automated defects detection in composite laminates via polarized computational imaging
Aug 24, 2021

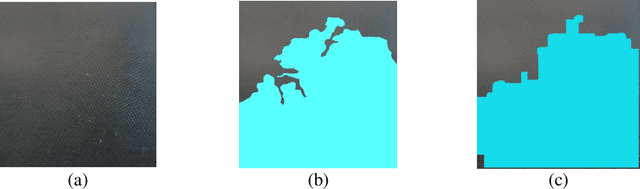

Finishing operations on large-scale composite components like wind turbine blades, including trimming and sanding, often require multiple workers and part repositioning. In the composites manufacturing industry, automation of such processes is challenging, as manufactured part geometry may be inconsistent and task completion is based on human judgment and experience. Implementing a mobile, collaborative robotic system capable of performing finishing tasks in dynamic and uncertain environments would improve quality and lower manufacturing costs. To complete the given tasks, the collaborative robotic team must properly understand the environment and detect irregularities in the manufactured parts. In this paper, we describe the initial implementation and demonstration of a polarized computational imaging system to identify defects in composite laminates. As the polarimetric images are highly relevant to the surface micro-geometry, they can be used to detect surface defects that are not visible in conventional color images. The proposed vision system successfully identifies defect types and surface characteristics (e.g., pinholes, voids, scratches, resin flash) for different glass fiber and carbon fiber laminates.
Non-Lambertian Surface Shape and Reflectance Reconstruction Using Concentric Multi-Spectral Light Field
Apr 19, 2019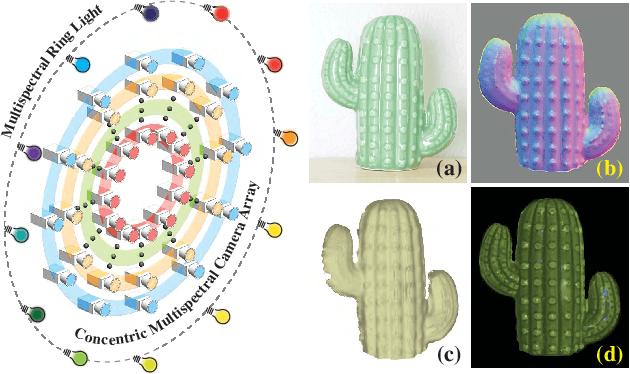
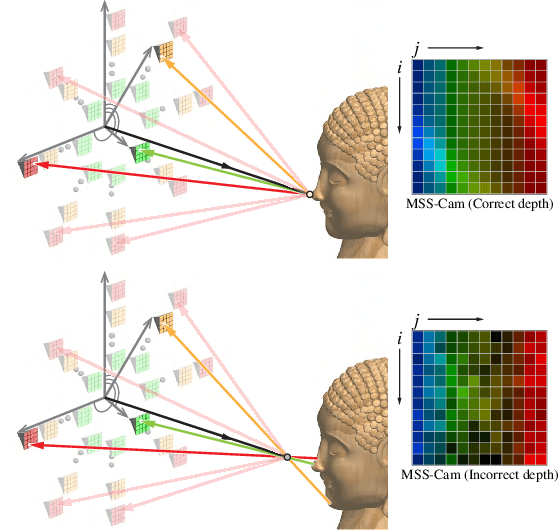
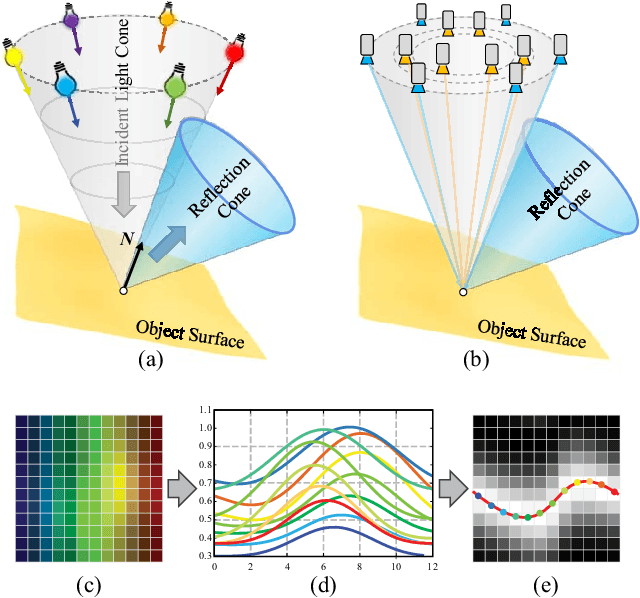
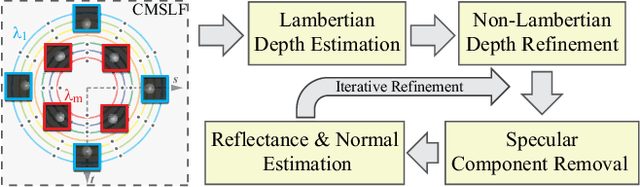
Recovering the shape and reflectance of non-Lambertian surfaces remains a challenging problem in computer vision since the view-dependent appearance invalidates traditional photo-consistency constraint. In this paper, we introduce a novel concentric multi-spectral light field (CMSLF) design that is able to recover the shape and reflectance of surfaces with arbitrary material in one shot. Our CMSLF system consists of an array of cameras arranged on concentric circles where each ring captures a specific spectrum. Coupled with a multi-spectral ring light, we are able to sample viewpoint and lighting variations in a single shot via spectral multiplexing. We further show that such concentric camera/light setting results in a unique pattern of specular changes across views that enables robust depth estimation. We formulate a physical-based reflectance model on CMSLF to estimate depth and multi-spectral reflectance map without imposing any surface prior. Extensive synthetic and real experiments show that our method outperforms state-of-the-art light field-based techniques, especially in non-Lambertian scenes.