 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWireless teleoperation of HSURF artificial fish in complex paths
Jul 06, 2024In this paper we show the application of the new robotic multi-platform system HSURF to a specific use case of teleoperation, aimed at monitoring and inspection. The HSURF system, consists of 3 different kinds of platforms: floater, sinker and robotic fishes. The collaborative control of the 3 platforms allows a remotely based operator to control the fish in order to visit and inspect several targets underwater following a complex trajectory. A shared autonomy solution shows to be the most suitable, in order to minimize the effect of limited bandwidth and relevant delay intrinsic to acoustic communications. The control architecture is described and preliminary results of the acoustically teleoperated visits of multiple targets in a testing pool are provided.
Nukhada USV: a Robot for Autonomous Surveying and Support to Underwater Operations
Jan 10, 2022
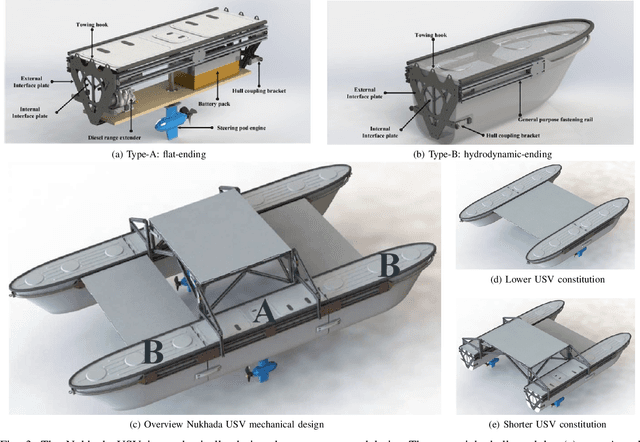
The Technology Innovation Institute in Abu Dhabi, United Arab Emirates, has recently finished the production and testing of a new unmanned surface vehicle, called Nukhada, specifically designed for autonomous survey, inspection, and support to underwater operations. This manuscript describes the main characteristics of the Nukhada USV, as well as some of the trials conducted during the development.