 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuess the Drift with LOP-UKF: LiDAR Odometry and Pacejka Model for Real-Time Racecar Sideslip Estimation
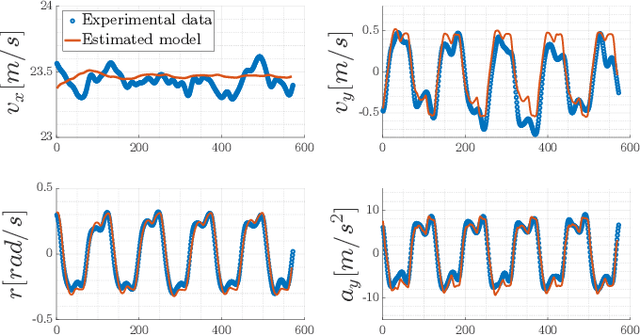
May 09, 2024The sideslip angle, crucial for vehicle safety and stability, is determined using both longitudinal and lateral velocities. However, measuring the lateral component often necessitates costly sensors, leading to its common estimation, a topic thoroughly explored in existing literature. This paper introduces LOP-UKF, a novel method for estimating vehicle lateral velocity by integrating Lidar Odometry with the Pacejka tire model predictions, resulting in a robust estimation via an Unscendent Kalman Filter (UKF). This combination represents a distinct alternative to more traditional methodologies, resulting in a reliable solution also in edge cases. We present experimental results obtained using the Dallara AV-21 across diverse circuits and track conditions, demonstrating the effectiveness of our method.
er.autopilot 1.0: The Full Autonomous Stack for Oval Racing at High Speeds
Oct 27, 2023



The Indy Autonomous Challenge (IAC) brought together for the first time in history nine autonomous racing teams competing at unprecedented speed and in head-to-head scenario, using independently developed software on open-wheel racecars. This paper presents the complete software architecture used by team TII EuroRacing (TII-ER), covering all the modules needed to avoid static obstacles, perform active overtakes and reach speeds above 75 m/s (270 km/h). In addition to the most common modules related to perception, planning, and control, we discuss the approaches used for vehicle dynamics modelling, simulation, telemetry, and safety. Overall results and the performance of each module are described, as well as the lessons learned during the first two events of the competition on oval tracks, where the team placed respectively second and third.
Uncovering the Background-Induced bias in RGB based 6-DoF Object Pose Estimation
Apr 17, 2023In recent years, there has been a growing trend of using data-driven methods in industrial settings. These kinds of methods often process video images or parts, therefore the integrity of such images is crucial. Sometimes datasets, e.g. consisting of images, can be sophisticated for various reasons. It becomes critical to understand how the manipulation of video and images can impact the effectiveness of a machine learning method. Our case study aims precisely to analyze the Linemod dataset, considered the state of the art in 6D pose estimation context. That dataset presents images accompanied by ArUco markers; it is evident that such markers will not be available in real-world contexts. We analyze how the presence of the markers affects the pose estimation accuracy, and how this bias may be mitigated through data augmentation and other methods. Our work aims to show how the presence of these markers goes to modify, in the testing phase, the effectiveness of the deep learning method used. In particular, we will demonstrate, through the tool of saliency maps, how the focus of the neural network is captured in part by these ArUco markers. Finally, a new dataset, obtained by applying geometric tools to Linemod, will be proposed in order to demonstrate our hypothesis and uncovering the bias. Our results demonstrate the potential for bias in 6DOF pose estimation networks, and suggest methods for reducing this bias when training with markers.
Model-Based Underwater 6D Pose Estimation from RGB
Feb 14, 2023



Object pose estimation underwater allows an autonomous system to perform tracking and intervention tasks. Nonetheless, underwater target pose estimation is remarkably challenging due to, among many factors, limited visibility, light scattering, cluttered environments, and constantly varying water conditions. An approach is to employ sonar or laser sensing to acquire 3D data, but besides being costly, the resulting data is normally noisy. For this reason, the community has focused on extracting pose estimates from RGB input. However, the literature is scarce and exhibits low detection accuracy. In this work, we propose an approach consisting of a 2D object detection and a 6D pose estimation that reliably obtains object poses in different underwater scenarios. To test our pipeline, we collect and make available a dataset of 4 objects in 10 different real scenes with annotations for object detection and pose estimation. We test our proposal in real and synthetic settings and compare its performance with similar end-to-end methodologies for 6D object pose estimation. Our dataset contains some challenging objects with symmetrical shapes and poor texture. Regardless of such object characteristics, our proposed method outperforms stat-of-the-art pose accuracy by ~8%. We finally demonstrate the reliability of our pose estimation pipeline by doing experiments with an underwater manipulation in a reaching task.
Motion Planning and Control for Multi Vehicle Autonomous Racing at High Speeds
Jul 22, 2022
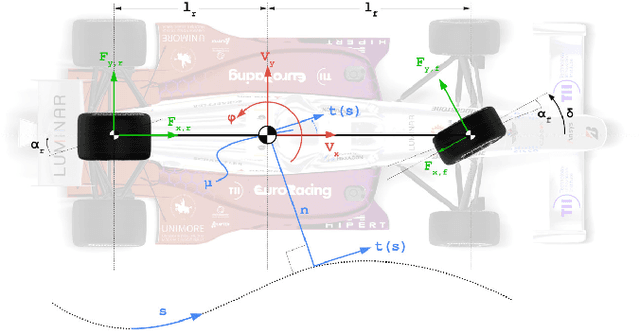

This paper presents a multi-layer motion planning and control architecture for autonomous racing, capable of avoiding static obstacles, performing active overtakes, and reaching velocities above 75 $m/s$. The used offline global trajectory generation and the online model predictive controller are highly based on optimization and dynamic models of the vehicle, where the tires and camber effects are represented in an extended version of the basic Pacejka Magic Formula. The proposed single-track model is identified and validated using multi-body motorsport libraries which allow simulating the vehicle dynamics properly, especially useful when real experimental data are missing. The fundamental regularization terms and constraints of the controller are tuned to reduce the rate of change of the inputs while assuring an acceptable velocity and path tracking. The motion planning strategy consists of a Fren\'et-Frame-based planner which considers a forecast of the opponent produced by a Kalman filter. The planner chooses the collision-free path and velocity profile to be tracked on a 3 seconds horizon to realize different goals such as following and overtaking. The proposed solution has been applied on a Dallara AV-21 racecar and tested at oval race tracks achieving lateral accelerations up to 25 $m/s^{2}$.
All You Can Embed: Natural Language based Vehicle Retrieval with Spatio-Temporal Transformers
Jun 18, 2021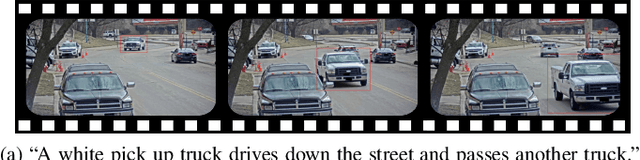
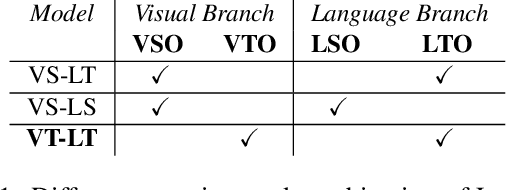
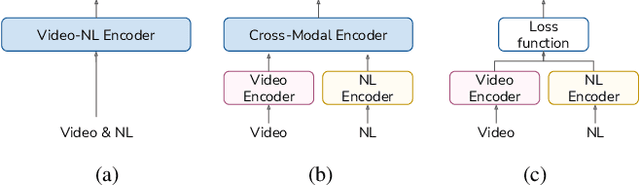
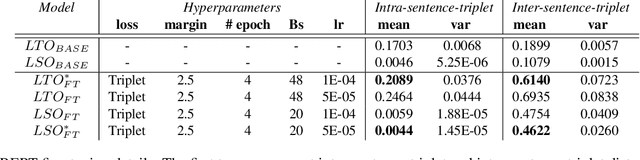
Combining Natural Language with Vision represents a unique and interesting challenge in the domain of Artificial Intelligence. The AI City Challenge Track 5 for Natural Language-Based Vehicle Retrieval focuses on the problem of combining visual and textual information, applied to a smart-city use case. In this paper, we present All You Can Embed (AYCE), a modular solution to correlate single-vehicle tracking sequences with natural language. The main building blocks of the proposed architecture are (i) BERT to provide an embedding of the textual descriptions, (ii) a convolutional backbone along with a Transformer model to embed the visual information. For the training of the retrieval model, a variation of the Triplet Margin Loss is proposed to learn a distance measure between the visual and language embeddings. The code is publicly available at https://github.com/cscribano/AYCE_2021.
Risk Ranked Recall: Collision Safety Metric for Object Detection Systems in Autonomous Vehicles
Jun 08, 2021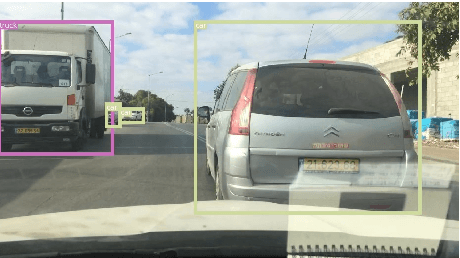
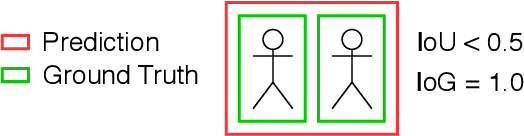
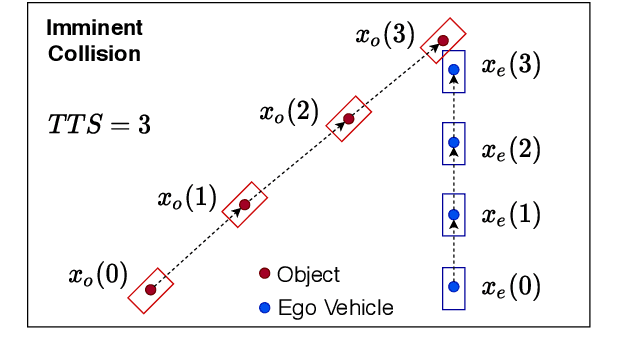

Commonly used metrics for evaluation of object detection systems (precision, recall, mAP) do not give complete information about their suitability of use in safety critical tasks, like obstacle detection for collision avoidance in Autonomous Vehicles (AV). This work introduces the Risk Ranked Recall ($R^3$) metrics for object detection systems. The $R^3$ metrics categorize objects within three ranks. Ranks are assigned based on an objective cyber-physical model for the risk of collision. Recall is measured for each rank.
Mise en abyme with artificial intelligence: how to predict the accuracy of NN, applied to hyper-parameter tuning
Jun 28, 2019
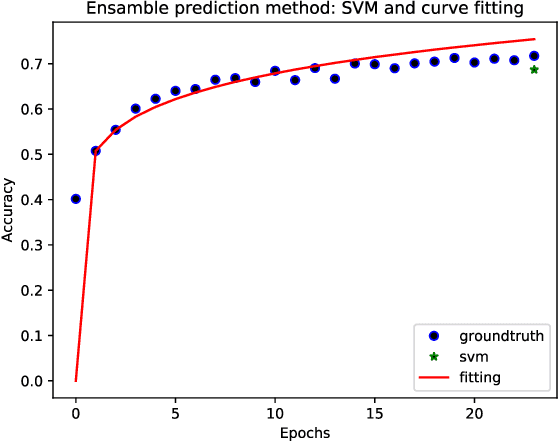
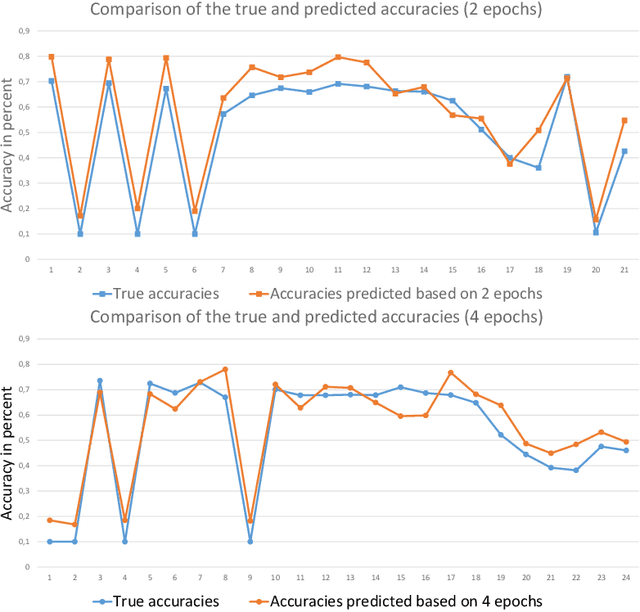
In the context of deep learning, the costliest phase from a computational point of view is the full training of the learning algorithm. However, this process is to be used a significant number of times during the design of a new artificial neural network, leading therefore to extremely expensive operations. Here, we propose a low-cost strategy to predict the accuracy of the algorithm, based only on its initial behaviour. To do so, we train the network of interest up to convergence several times, modifying its characteristics at each training. The initial and final accuracies observed during this beforehand process are stored in a database. We then make use of both curve fitting and Support Vector Machines techniques, the latter being trained on the created database, to predict the accuracy of the network, given its accuracy on the primary iterations of its learning. This approach can be of particular interest when the space of the characteristics of the network is notably large or when its full training is highly time-consuming. The results we obtained are promising and encouraged us to apply this strategy to a topical issue: hyper-parameter optimisation (HO). In particular, we focused on the HO of a convolutional neural network for the classification of the databases MNIST and CIFAR-10. By using our method of prediction, and an algorithm implemented by us for a probabilistic exploration of the hyper-parameter space, we were able to find the hyper-parameter settings corresponding to the optimal accuracies already known in literature, at a quite low-cost.
* The research leading to these results has received funding from the European Union's Horizon 2020 Programme under the CLASS Project (https://class-project.eu/), grant agreement n 780622