 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeer.autopilot 1.0: The Full Autonomous Stack for Oval Racing at High Speeds
Oct 27, 2023



The Indy Autonomous Challenge (IAC) brought together for the first time in history nine autonomous racing teams competing at unprecedented speed and in head-to-head scenario, using independently developed software on open-wheel racecars. This paper presents the complete software architecture used by team TII EuroRacing (TII-ER), covering all the modules needed to avoid static obstacles, perform active overtakes and reach speeds above 75 m/s (270 km/h). In addition to the most common modules related to perception, planning, and control, we discuss the approaches used for vehicle dynamics modelling, simulation, telemetry, and safety. Overall results and the performance of each module are described, as well as the lessons learned during the first two events of the competition on oval tracks, where the team placed respectively second and third.
Motion Planning and Control for Multi Vehicle Autonomous Racing at High Speeds
Jul 22, 2022
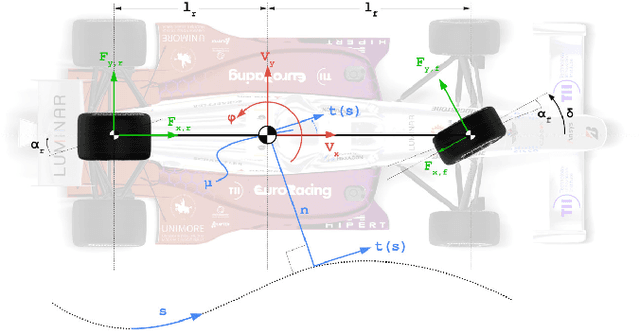

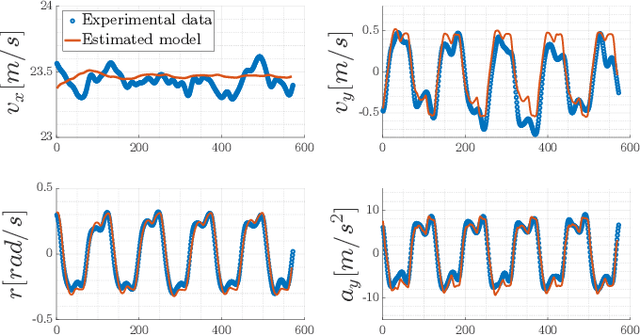
This paper presents a multi-layer motion planning and control architecture for autonomous racing, capable of avoiding static obstacles, performing active overtakes, and reaching velocities above 75 $m/s$. The used offline global trajectory generation and the online model predictive controller are highly based on optimization and dynamic models of the vehicle, where the tires and camber effects are represented in an extended version of the basic Pacejka Magic Formula. The proposed single-track model is identified and validated using multi-body motorsport libraries which allow simulating the vehicle dynamics properly, especially useful when real experimental data are missing. The fundamental regularization terms and constraints of the controller are tuned to reduce the rate of change of the inputs while assuring an acceptable velocity and path tracking. The motion planning strategy consists of a Fren\'et-Frame-based planner which considers a forecast of the opponent produced by a Kalman filter. The planner chooses the collision-free path and velocity profile to be tracked on a 3 seconds horizon to realize different goals such as following and overtaking. The proposed solution has been applied on a Dallara AV-21 racecar and tested at oval race tracks achieving lateral accelerations up to 25 $m/s^{2}$.