 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuess the Drift with LOP-UKF: LiDAR Odometry and Pacejka Model for Real-Time Racecar Sideslip Estimation
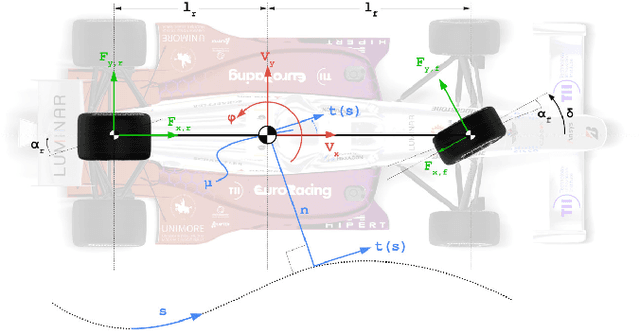
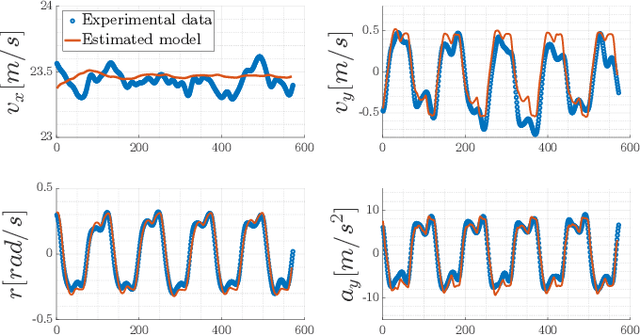
May 09, 2024The sideslip angle, crucial for vehicle safety and stability, is determined using both longitudinal and lateral velocities. However, measuring the lateral component often necessitates costly sensors, leading to its common estimation, a topic thoroughly explored in existing literature. This paper introduces LOP-UKF, a novel method for estimating vehicle lateral velocity by integrating Lidar Odometry with the Pacejka tire model predictions, resulting in a robust estimation via an Unscendent Kalman Filter (UKF). This combination represents a distinct alternative to more traditional methodologies, resulting in a reliable solution also in edge cases. We present experimental results obtained using the Dallara AV-21 across diverse circuits and track conditions, demonstrating the effectiveness of our method.
A Tricycle Model to Accurately Control an Autonomous Racecar with Locked Differential
Dec 22, 2023In this paper, we present a novel formulation to model the effects of a locked differential on the lateral dynamics of an autonomous open-wheel racecar. The model is used in a Model Predictive Controller in which we included a micro-steps discretization approach to accurately linearize the dynamics and produce a prediction suitable for real-time implementation. The stability analysis of the model is presented, as well as a brief description of the overall planning and control scheme which includes an offline trajectory generation pipeline, an online local speed profile planner, and a low-level longitudinal controller. An improvement of the lateral path tracking is demonstrated in preliminary experimental results that have been produced on a Dallara AV-21 during the first Indy Autonomous Challenge event on the Monza F1 racetrack. Final adjustments and tuning have been performed in a high-fidelity simulator demonstrating the effectiveness of the solution when performing close to the tire limits.
er.autopilot 1.0: The Full Autonomous Stack for Oval Racing at High Speeds
Oct 27, 2023



The Indy Autonomous Challenge (IAC) brought together for the first time in history nine autonomous racing teams competing at unprecedented speed and in head-to-head scenario, using independently developed software on open-wheel racecars. This paper presents the complete software architecture used by team TII EuroRacing (TII-ER), covering all the modules needed to avoid static obstacles, perform active overtakes and reach speeds above 75 m/s (270 km/h). In addition to the most common modules related to perception, planning, and control, we discuss the approaches used for vehicle dynamics modelling, simulation, telemetry, and safety. Overall results and the performance of each module are described, as well as the lessons learned during the first two events of the competition on oval tracks, where the team placed respectively second and third.
Motion Planning and Control for Multi Vehicle Autonomous Racing at High Speeds
Jul 22, 2022

This paper presents a multi-layer motion planning and control architecture for autonomous racing, capable of avoiding static obstacles, performing active overtakes, and reaching velocities above 75 $m/s$. The used offline global trajectory generation and the online model predictive controller are highly based on optimization and dynamic models of the vehicle, where the tires and camber effects are represented in an extended version of the basic Pacejka Magic Formula. The proposed single-track model is identified and validated using multi-body motorsport libraries which allow simulating the vehicle dynamics properly, especially useful when real experimental data are missing. The fundamental regularization terms and constraints of the controller are tuned to reduce the rate of change of the inputs while assuring an acceptable velocity and path tracking. The motion planning strategy consists of a Fren\'et-Frame-based planner which considers a forecast of the opponent produced by a Kalman filter. The planner chooses the collision-free path and velocity profile to be tracked on a 3 seconds horizon to realize different goals such as following and overtaking. The proposed solution has been applied on a Dallara AV-21 racecar and tested at oval race tracks achieving lateral accelerations up to 25 $m/s^{2}$.
Fast and Accurate Error Simulation for CNNs against Soft Errors
Jun 04, 2022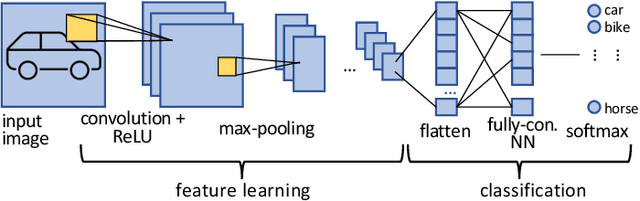
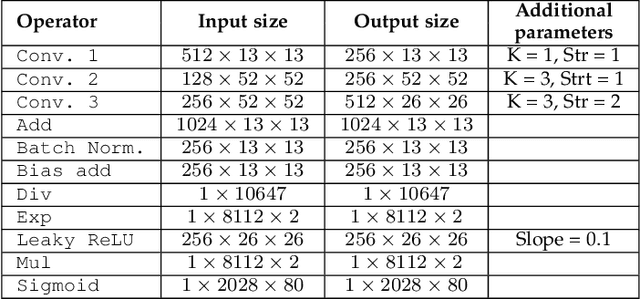
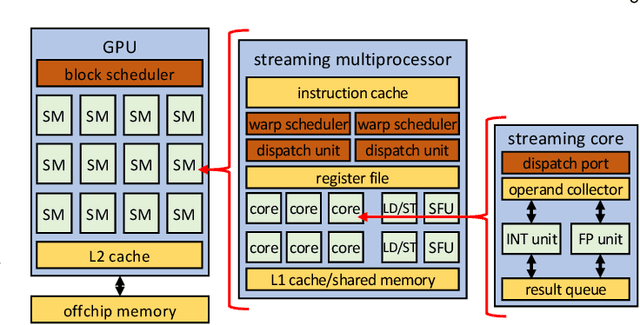
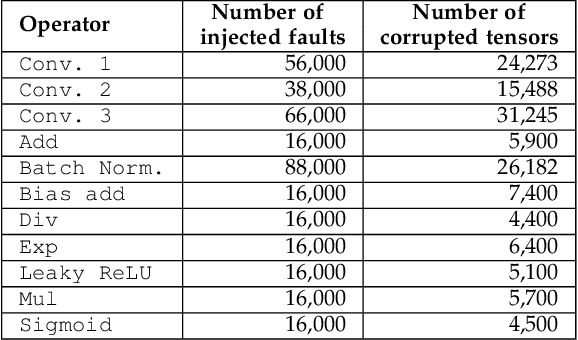
The great quest for adopting AI-based computation for safety-/mission-critical applications motivates the interest towards methods for assessing the robustness of the application w.r.t. not only its training/tuning but also errors due to faults, in particular soft errors, affecting the underlying hardware. Two strategies exist: architecture-level fault injection and application-level functional error simulation. We present a framework for the reliability analysis of Convolutional Neural Networks (CNNs) via an error simulation engine that exploits a set of validated error models extracted from a detailed fault injection campaign. These error models are defined based on the corruption patterns of the output of the CNN operators induced by faults and bridge the gap between fault injection and error simulation, exploiting the advantages of both approaches. We compared our methodology against SASSIFI for the accuracy of functional error simulation w.r.t. fault injection, and against TensorFI in terms of speedup for the error simulation strategy. Experimental results show that our methodology achieves about 99\% accuracy of the fault effects w.r.t. SASSIFI, and a speedup ranging from 44x up to 63x w.r.t. TensorFI, that only implements a limited set of error models.