 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater Robotic Simulators Review for Autonomous System Development
Apr 08, 2025The increasing complexity of underwater robotic systems has led to a surge in simulation platforms designed to support perception, planning, and control tasks in marine environments. However, selecting the most appropriate underwater robotic simulator (URS) remains a challenge due to wide variations in fidelity, extensibility, and task suitability. This paper presents a comprehensive review and comparative analysis of five state-of-the-art, ROS-compatible, open-source URSs: Stonefish, DAVE, HoloOcean, MARUS, and UNav-Sim. Each simulator is evaluated across multiple criteria including sensor fidelity, environmental realism, sim-to-real capabilities, and research impact. We evaluate them across architectural design, sensor and physics modeling, task capabilities, and research impact. Additionally, we discuss ongoing challenges in sim-to-real transfer and highlight the need for standardization and benchmarking in the field. Our findings aim to guide practitioners in selecting effective simulation environments and inform future development of more robust and transferable URSs.
Underwater Human-Robot and Human-Swarm Interaction: A Review and Perspective
Jun 18, 2024



There has been a growing interest in extending the capabilities of autonomous underwater vehicles (AUVs) in subsea missions, particularly in integrating underwater human-robot interaction (UHRI) for control. UHRI and its subfield,underwater gesture recognition (UGR), play a significant role in enhancing diver-robot communication for marine research. This review explores the latest developments in UHRI and examines its promising applications for multi-robot systems. With the developments in UGR, opportunities are presented for underwater robots to work alongside human divers to increase their functionality. Human gestures creates a seamless and safe collaborative environment where divers and robots can interact more efficiently. By highlighting the state-of-the-art in this field, we can potentially encourage advancements in underwater multi-robot system (UMRS) blending the natural communication channels of human-robot interaction with the multi-faceted coordination capabilities of underwater swarms,thus enhancing robustness in complex aquatic environments.
Model-Based Underwater 6D Pose Estimation from RGB
Feb 14, 2023



Object pose estimation underwater allows an autonomous system to perform tracking and intervention tasks. Nonetheless, underwater target pose estimation is remarkably challenging due to, among many factors, limited visibility, light scattering, cluttered environments, and constantly varying water conditions. An approach is to employ sonar or laser sensing to acquire 3D data, but besides being costly, the resulting data is normally noisy. For this reason, the community has focused on extracting pose estimates from RGB input. However, the literature is scarce and exhibits low detection accuracy. In this work, we propose an approach consisting of a 2D object detection and a 6D pose estimation that reliably obtains object poses in different underwater scenarios. To test our pipeline, we collect and make available a dataset of 4 objects in 10 different real scenes with annotations for object detection and pose estimation. We test our proposal in real and synthetic settings and compare its performance with similar end-to-end methodologies for 6D object pose estimation. Our dataset contains some challenging objects with symmetrical shapes and poor texture. Regardless of such object characteristics, our proposed method outperforms stat-of-the-art pose accuracy by ~8%. We finally demonstrate the reliability of our pose estimation pipeline by doing experiments with an underwater manipulation in a reaching task.
Underwater Robot Manipulation: Advances, Challenges and Prospective Ventures
Jan 09, 2022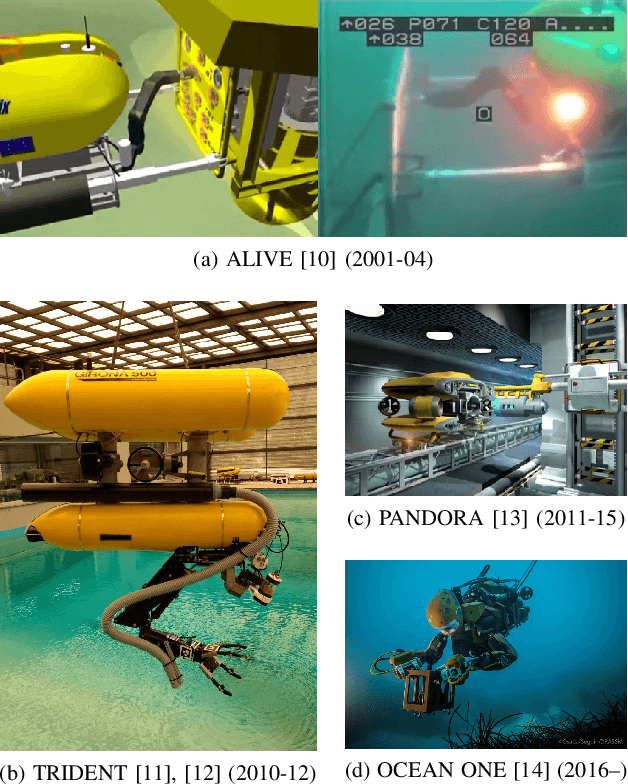

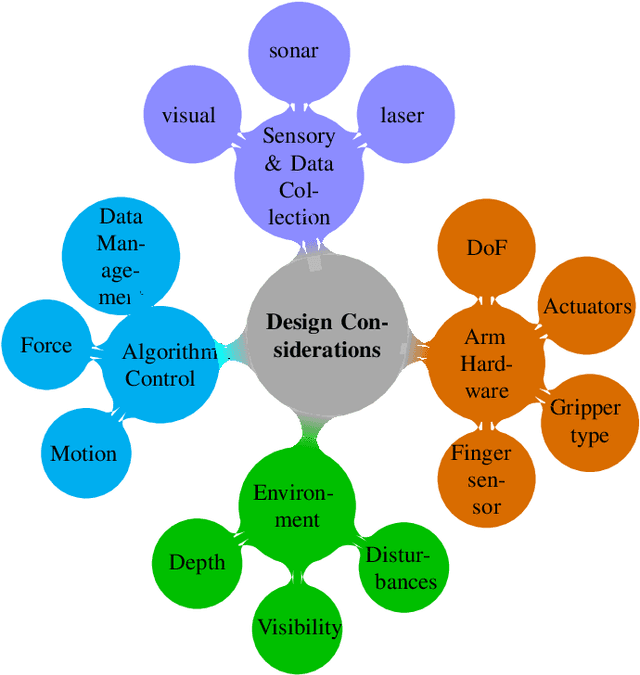
Underwater manipulation is one of the most remarkable ongoing research subjects in robotics. \acp{I-AUV} not only have to cope with the technical challenges associated with traditional manipulation tasks but do so while currents and waves perturb the stability of the vehicle, and low-light, turbid water conditions impede perceiving the surroundings. Certainly, the dynamic nature and our limited understanding of the marine environment hinder the autonomous performance of underwater robot manipulation. This manuscript provides a discussion on previous research and the limiting factors that impose on the long-envisioned prospects of autonomous underwater manipulation to finally highlight research directions that have the potential to improve the autonomy capabilities of I-AUV.