 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable-Resolution Virtual Maps for Autonomous Exploration with Unmanned Surface Vehicles (USVs)
Mar 24, 2026Autonomous exploration by unmanned surface vehicles (USVs) in near-shore waters requires reliable localisation and consistent mapping over extended areas, but this is challenged by GNSS degradation, environment-induced localisation uncertainty, and limited on-board computation. Virtual map-based methods explicitly model localisation and mapping uncertainty by tightly coupling factor-graph SLAM with a map uncertainty criterion. However, their storage and computational costs scale poorly with fixed-resolution workspace discretisations, leading to inefficiency in large near-shore environments. Moreover, overvaluing feature-sparse open-water regions can increase the risk of SLAM failure as a result of imbalance between exploration and exploitation. To address these limitations, we propose a Variable-Resolution Virtual Map (VRVM), a computationally efficient method for representing map uncertainty using bivariate Gaussian virtual landmarks placed in the cells of an adaptive quadtree. The adaptive quadtree enables an area-weighted uncertainty representation that keeps coarse, far-field virtual landmarks deliberately uncertain while allocating higher resolution to information-dense regions, and reduces the sensitivity of the map valuation to local refinements of the tree. An expectation-maximisation (EM) planner is adopted to evaluate pose and map uncertainty along frontiers using the VRVM, balancing exploration and exploitation. We evaluate VRVM against several state-of-the-art exploration algorithms in the VRX Gazebo simulator, using a realistic marina environment across different testing scenarios with an increasing level of exploration difficulty. The results indicate that our method offers safer behaviour and better utilisation of on-board computation in GNSS-degraded near-shore environments.
Underwater Robotic Simulators Review for Autonomous System Development
Apr 08, 2025The increasing complexity of underwater robotic systems has led to a surge in simulation platforms designed to support perception, planning, and control tasks in marine environments. However, selecting the most appropriate underwater robotic simulator (URS) remains a challenge due to wide variations in fidelity, extensibility, and task suitability. This paper presents a comprehensive review and comparative analysis of five state-of-the-art, ROS-compatible, open-source URSs: Stonefish, DAVE, HoloOcean, MARUS, and UNav-Sim. Each simulator is evaluated across multiple criteria including sensor fidelity, environmental realism, sim-to-real capabilities, and research impact. We evaluate them across architectural design, sensor and physics modeling, task capabilities, and research impact. Additionally, we discuss ongoing challenges in sim-to-real transfer and highlight the need for standardization and benchmarking in the field. Our findings aim to guide practitioners in selecting effective simulation environments and inform future development of more robust and transferable URSs.
Dynamic Obstacle Avoidance of Unmanned Surface Vehicles in Maritime Environments Using Gaussian Processes Based Motion Planning
Dec 10, 2024During recent years, unmanned surface vehicles are extensively utilised in a variety of maritime applications such as the exploration of unknown areas, autonomous transportation, offshore patrol and others. In such maritime applications, unmanned surface vehicles executing relevant missions that might collide with potential static obstacles such as islands and reefs and dynamic obstacles such as other moving unmanned surface vehicles. To successfully accomplish these missions, motion planning algorithms that can generate smooth and collision-free trajectories to avoid both these static and dynamic obstacles in an efficient manner are essential. In this article, we propose a novel motion planning algorithm named the Dynamic Gaussian process motion planner 2, which successfully extends the application scope of the Gaussian process motion planner 2 into complex and dynamic environments with both static and dynamic obstacles. First, we introduce an approach to generate safe areas for dynamic obstacles using modified multivariate Gaussian distributions. Second, we introduce an approach to integrate real-time status information of dynamic obstacles into the modified multivariate Gaussian distributions. Therefore, the multivariate Gaussian distributions with real-time statuses of dynamic obstacles can be innovatively added into the optimisation process of factor graph to generate an optimised trajectory. The proposed Dynamic Gaussian process motion planner 2 algorithm has been validated in a series of benchmark simulations in the Matrix laboratory and a dynamic obstacle avoidance mission in a high-fidelity maritime environment in the Robotic operating system to demonstrate its functionality and practicability.
Local Navigation Among Movable Obstacles with Deep Reinforcement Learning
Mar 04, 2023



Autonomous robots would benefit a lot by gaining the ability to manipulate their environment to solve path planning tasks, known as the Navigation Among Movable Obstacle (NAMO) problem. In this paper, we present a deep reinforcement learning approach for solving NAMO locally, near narrow passages. We train parallel agents in physics simulation using an Advantage Actor-Critic based algorithm with a multi-modal neural network. We present an online policy that is able to push obstacles in a non-axial-aligned fashion, react to unexpected obstacle dynamics in real-time, and solve the local NAMO problem. Experimental validation in simulation shows that the presented approach generalises to unseen NAMO problems in unknown environments. We further demonstrate the implementation of the policy on a real quadrupedal robot, showing that the policy can deal with real-world sensor noises and uncertainties in unseen NAMO tasks.
A Fully-autonomous Framework of Unmanned Surface Vehicles in Maritime Environments using Gaussian Process Motion Planning
Apr 22, 2022
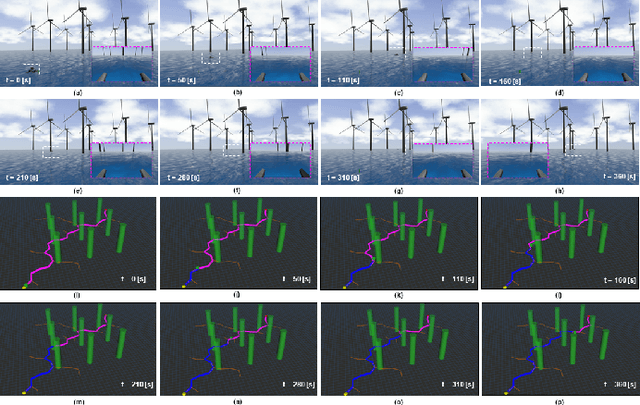


Unmanned surface vehicles (USVs) are of increasing importance to a growing number of sectors in the maritime industry, including offshore exploration, marine transportation and defence operations. A major factor in the growth in use and deployment of USVs is the increased operational flexibility that is offered through use of autonomous navigation systems that generate optimised trajectories. Unlike path planning in terrestrial environments, planning in the maritime environment is more demanding as there is need to assure mitigating action is taken against the significant, random and often unpredictable environmental influences from winds and ocean currents. With the focus of these necessary requirements as the main basis of motivation, this paper proposes a novel motion planner, denoted as GPMP2*, extending the application scope of the fundamental GP-based motion planner, GPMP2, into complex maritime environments. An interpolation strategy based on Monte-Carlo stochasticity has been innovatively added to GPMP2* to produce a new algorithm named GPMP2* with Monte-Carlo stochasticity (MC-GPMP2*), which can increase the diversity of the paths generated. In parallel with algorithm design, a ROS based fully-autonomous framework for an advanced unmanned surface vehicle, the WAM-V 20 USV, has been proposed. The practicability of the proposed motion planner as well as the fully-autonomous framework have been functionally validated in a simulated inspection missions for an offshore wind farm in ROS.