 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments
Dec 10, 2024With the development of science and technology, mobile robots are playing a significant important role in the new round of world revolution. Further, mobile robots might assist or replace human beings in a great number of areas. To increase the degree of automation for mobile robots, advanced motion planners need to be integrated into them to cope with various environments. Complex maze environments are common in the potential application scenarios of different mobile robots. This article proposes a novel motion planner named the rapidly exploring random tree based Gaussian process motion planner 2, which aims to tackle the motion planning problem for mobile robots in complex maze environments. To be more specific, the proposed motion planner successfully combines the advantages of a trajectory optimisation motion planning algorithm named the Gaussian process motion planner 2 and a sampling-based motion planning algorithm named the rapidly exploring random tree. To validate the performance and practicability of the proposed motion planner, we have tested it in several simulations in the Matrix laboratory and applied it on a marine mobile robot in a virtual scenario in the Robotic operating system.
Dynamic Obstacle Avoidance of Unmanned Surface Vehicles in Maritime Environments Using Gaussian Processes Based Motion Planning
Dec 10, 2024During recent years, unmanned surface vehicles are extensively utilised in a variety of maritime applications such as the exploration of unknown areas, autonomous transportation, offshore patrol and others. In such maritime applications, unmanned surface vehicles executing relevant missions that might collide with potential static obstacles such as islands and reefs and dynamic obstacles such as other moving unmanned surface vehicles. To successfully accomplish these missions, motion planning algorithms that can generate smooth and collision-free trajectories to avoid both these static and dynamic obstacles in an efficient manner are essential. In this article, we propose a novel motion planning algorithm named the Dynamic Gaussian process motion planner 2, which successfully extends the application scope of the Gaussian process motion planner 2 into complex and dynamic environments with both static and dynamic obstacles. First, we introduce an approach to generate safe areas for dynamic obstacles using modified multivariate Gaussian distributions. Second, we introduce an approach to integrate real-time status information of dynamic obstacles into the modified multivariate Gaussian distributions. Therefore, the multivariate Gaussian distributions with real-time statuses of dynamic obstacles can be innovatively added into the optimisation process of factor graph to generate an optimised trajectory. The proposed Dynamic Gaussian process motion planner 2 algorithm has been validated in a series of benchmark simulations in the Matrix laboratory and a dynamic obstacle avoidance mission in a high-fidelity maritime environment in the Robotic operating system to demonstrate its functionality and practicability.
Reliable Academic Conference Question Answering: A Study Based on Large Language Model
Oct 19, 2023



The rapid growth of computer science has led to a proliferation of research presented at academic conferences, fostering global scholarly communication. Researchers consistently seek accurate, current information about these events at all stages. This data surge necessitates an intelligent question-answering system to efficiently address researchers' queries and ensure awareness of the latest advancements. The information of conferences is usually published on their official website, organized in a semi-structured way with a lot of text. To address this need, we have developed the ConferenceQA dataset for 7 diverse academic conferences with human annotations. Firstly, we employ a combination of manual and automated methods to organize academic conference data in a semi-structured JSON format. Subsequently, we annotate nearly 100 question-answer pairs for each conference. Each pair is classified into four different dimensions. To ensure the reliability of the data, we manually annotate the source of each answer. In light of recent advancements, Large Language Models (LLMs) have demonstrated impressive performance in various NLP tasks. They have demonstrated impressive capabilities in information-seeking question answering after instruction fine-tuning, and as such, we present our conference QA study based on LLM. Due to hallucination and outdated knowledge of LLMs, we adopt retrieval based methods to enhance LLMs' question-answering abilities. We have proposed a structure-aware retrieval method, specifically designed to leverage inherent structural information during the retrieval process. Empirical validation on the ConferenceQA dataset has demonstrated the effectiveness of this method. The dataset and code are readily accessible on https://github.com/zjukg/ConferenceQA.
A Fully-autonomous Framework of Unmanned Surface Vehicles in Maritime Environments using Gaussian Process Motion Planning
Apr 22, 2022
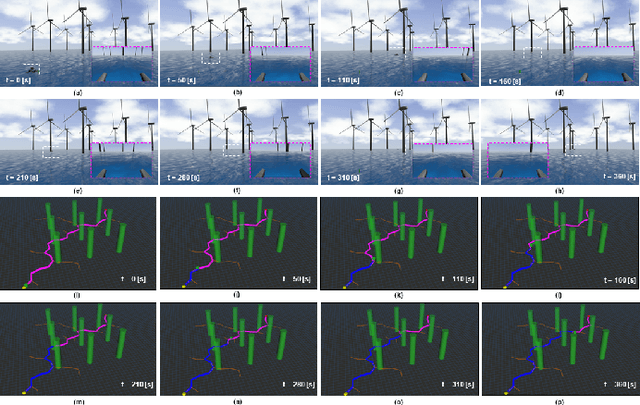


Unmanned surface vehicles (USVs) are of increasing importance to a growing number of sectors in the maritime industry, including offshore exploration, marine transportation and defence operations. A major factor in the growth in use and deployment of USVs is the increased operational flexibility that is offered through use of autonomous navigation systems that generate optimised trajectories. Unlike path planning in terrestrial environments, planning in the maritime environment is more demanding as there is need to assure mitigating action is taken against the significant, random and often unpredictable environmental influences from winds and ocean currents. With the focus of these necessary requirements as the main basis of motivation, this paper proposes a novel motion planner, denoted as GPMP2*, extending the application scope of the fundamental GP-based motion planner, GPMP2, into complex maritime environments. An interpolation strategy based on Monte-Carlo stochasticity has been innovatively added to GPMP2* to produce a new algorithm named GPMP2* with Monte-Carlo stochasticity (MC-GPMP2*), which can increase the diversity of the paths generated. In parallel with algorithm design, a ROS based fully-autonomous framework for an advanced unmanned surface vehicle, the WAM-V 20 USV, has been proposed. The practicability of the proposed motion planner as well as the fully-autonomous framework have been functionally validated in a simulated inspection missions for an offshore wind farm in ROS.