 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Session Ground Texture SLAM in Low-Dynamic Environments
May 19, 2026The simultaneous localization and mapping community has introduced a growing number of systems adapted for multi-session operations where the operational environment features low-dynamic changes that impact mapping, such as surface wear, weather phenomena, or seasonal change. These systems allow for lifelong operations by a robot within these environments. There is also growing interest in operations in environments where the unique ground texture is the only mapping feature available for use. These ground texture systems are not yet targeted for multi-session low-dynamic-change environments though. This work explores the impact of three different techniques on trajectory estimation accuracy in these multi-session low-dynamic ground texture environments. Of the three, the use of Kullback-Leibler Divergence, as a similarity score and a bias influencing loop closure confidence, is found to have the most success. We show an analysis of all three methods and a deeper exploration of the impact of Kullback-Leibler Divergence. We also introduce a dataset for use by the robotics community that contains multi-session images where the ground changes between sessions and also high-accuracy pose information for use in evaluation.
Variable-Resolution Virtual Maps for Autonomous Exploration with Unmanned Surface Vehicles (USVs)
Mar 24, 2026Autonomous exploration by unmanned surface vehicles (USVs) in near-shore waters requires reliable localisation and consistent mapping over extended areas, but this is challenged by GNSS degradation, environment-induced localisation uncertainty, and limited on-board computation. Virtual map-based methods explicitly model localisation and mapping uncertainty by tightly coupling factor-graph SLAM with a map uncertainty criterion. However, their storage and computational costs scale poorly with fixed-resolution workspace discretisations, leading to inefficiency in large near-shore environments. Moreover, overvaluing feature-sparse open-water regions can increase the risk of SLAM failure as a result of imbalance between exploration and exploitation. To address these limitations, we propose a Variable-Resolution Virtual Map (VRVM), a computationally efficient method for representing map uncertainty using bivariate Gaussian virtual landmarks placed in the cells of an adaptive quadtree. The adaptive quadtree enables an area-weighted uncertainty representation that keeps coarse, far-field virtual landmarks deliberately uncertain while allocating higher resolution to information-dense regions, and reduces the sensitivity of the map valuation to local refinements of the tree. An expectation-maximisation (EM) planner is adopted to evaluate pose and map uncertainty along frontiers using the VRVM, balancing exploration and exploitation. We evaluate VRVM against several state-of-the-art exploration algorithms in the VRX Gazebo simulator, using a realistic marina environment across different testing scenarios with an increasing level of exploration difficulty. The results indicate that our method offers safer behaviour and better utilisation of on-board computation in GNSS-degraded near-shore environments.
Towards Versatile Opti-Acoustic Sensor Fusion and Volumetric Mapping
Mar 15, 2026Accurate 3D volumetric mapping is critical for autonomous underwater vehicles operating in obstacle-rich environments. Vision-based perception provides high-resolution data but fails in turbid conditions, while sonar is robust to lighting and turbidity but suffers from low resolution and elevation ambiguity. This paper presents a volumetric mapping framework that fuses a stereo sonar pair with a monocular camera to enable safe navigation under varying visibility conditions. Overlapping sonar fields of view resolve elevation ambiguity, producing fully defined 3D point clouds at each time step. The framework identifies regions of interest in camera images, associates them with corresponding sonar returns, and combines sonar range with camera-derived elevation cues to generate additional 3D points. Each 3D point is assigned a confidence value reflecting its reliability. These confidence-weighted points are fused using a Gaussian Process Volumetric Mapping framework that prioritizes the most reliable measurements. Experimental comparisons with other opti-acoustic and sonar-based approaches, along with field tests in a marina environment, demonstrate the method's effectiveness in capturing complex geometries and preserving critical information for robot navigation in both clear and turbid conditions. Our code is open-source to support community adoption.
DRACo-SLAM2: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar EquippedUnderwater Robot Teams with Object Graph Matching
Jul 31, 2025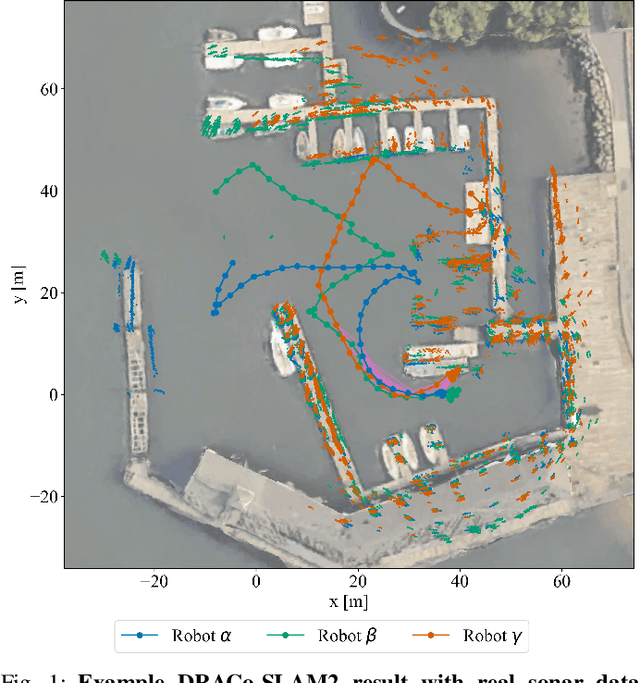
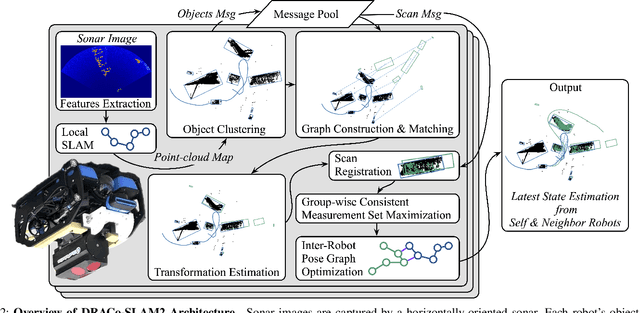
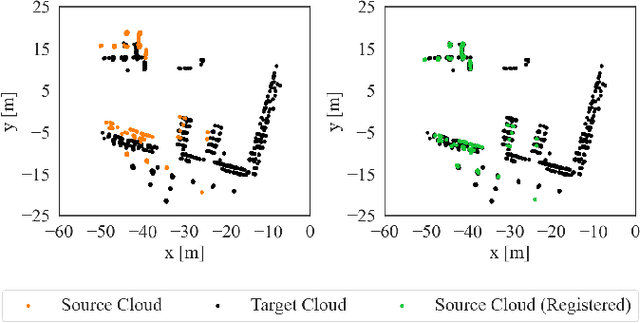
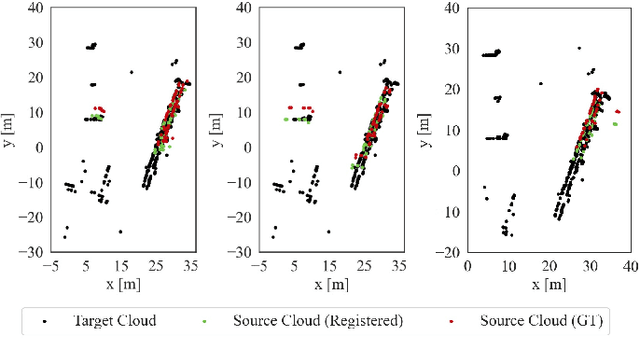
We present DRACo-SLAM2, a distributed SLAM framework for underwater robot teams equipped with multibeam imaging sonar. This framework improves upon the original DRACo-SLAM by introducing a novel representation of sonar maps as object graphs and utilizing object graph matching to achieve time-efficient inter-robot loop closure detection without relying on prior geometric information. To better-accommodate the needs and characteristics of underwater scan matching, we propose incremental Group-wise Consistent Measurement Set Maximization (GCM), a modification of Pairwise Consistent Measurement Set Maximization (PCM), which effectively handles scenarios where nearby inter-robot loop closures share similar registration errors. The proposed approach is validated through extensive comparative analyses on simulated and real-world datasets.
Large-Scale Dense 3D Mapping Using Submaps Derived From Orthogonal Imaging Sonars
Dec 04, 20243D situational awareness is critical for any autonomous system. However, when operating underwater, environmental conditions often dictate the use of acoustic sensors. These acoustic sensors are plagued by high noise and a lack of 3D information in sonar imagery, motivating the use of an orthogonal pair of imaging sonars to recover 3D perceptual data. Thus far, mapping systems in this area only use a subset of the available data at discrete timesteps and rely on object-level prior information in the environment to develop high-coverage 3D maps. Moreover, simple repeating objects must be present to build high-coverage maps. In this work, we propose a submap-based mapping system integrated with a simultaneous localization and mapping (SLAM) system to produce dense, 3D maps of complex unknown environments with varying densities of simple repeating objects. We compare this submapping approach to our previous works in this area, analyzing simple and highly complex environments, such as submerged aircraft. We analyze the tradeoffs between a submapping-based approach and our previous work leveraging simple repeating objects. We show where each method is well-motivated and where they fall short. Importantly, our proposed use of submapping achieves an advance in underwater situational awareness with wide aperture multi-beam imaging sonar, moving toward generalized large-scale dense 3D mapping capability for fully unknown complex environments.
A Bimanual Teleoperation Framework for Light Duty Underwater Vehicle-Manipulator Systems
Apr 04, 2024In an effort to lower the barrier to entry in underwater manipulation, this paper presents an open-source, user-friendly framework for bimanual teleoperation of a light-duty underwater vehicle-manipulator system (UVMS). This framework allows for the control of the vehicle along with two manipulators and their end-effectors using two low-cost haptic devices. The UVMS kinematics are derived in order to create an independent resolved motion rate controller for each manipulator, which optimally controls the joint positions to achieve a desired end-effector pose. This desired pose is computed in real-time using a teleoperation controller developed to process the dual haptic device input from the user. A physics-based simulation environment is used to implement this framework for two example tasks as well as provide data for error analysis of user commands. The first task illustrates the functionality of the framework through motion control of the vehicle and manipulators using only the haptic devices. The second task is to grasp an object using both manipulators simultaneously, demonstrating precision and coordination using the framework. The framework code is available at https://github.com/stevens-armlab/uvms_bimanual_sim.
MAC: Maximizing Algebraic Connectivity for Graph Sparsification
Mar 28, 2024



Simultaneous localization and mapping (SLAM) is a critical capability in autonomous navigation, but memory and computational limits make long-term application of common SLAM techniques impractical; a robot must be able to determine what information should be retained and what can safely be forgotten. In graph-based SLAM, the number of edges (measurements) in a pose graph determines both the memory requirements of storing a robot's observations and the computational expense of algorithms deployed for performing state estimation using those observations, both of which can grow unbounded during long-term navigation. Motivated by these challenges, we propose a new general purpose approach to sparsify graphs in a manner that maximizes algebraic connectivity, a key spectral property of graphs which has been shown to control the estimation error of pose graph SLAM solutions. Our algorithm, MAC (for maximizing algebraic connectivity), is simple and computationally inexpensive, and admits formal post hoc performance guarantees on the quality of the solution that it provides. In application to the problem of pose-graph SLAM, we show on several benchmark datasets that our approach quickly produces high-quality sparsification results which retain the connectivity of the graph and, in turn, the quality of corresponding SLAM solutions.
Real-Time Planning Under Uncertainty for AUVs Using Virtual Maps
Mar 07, 2024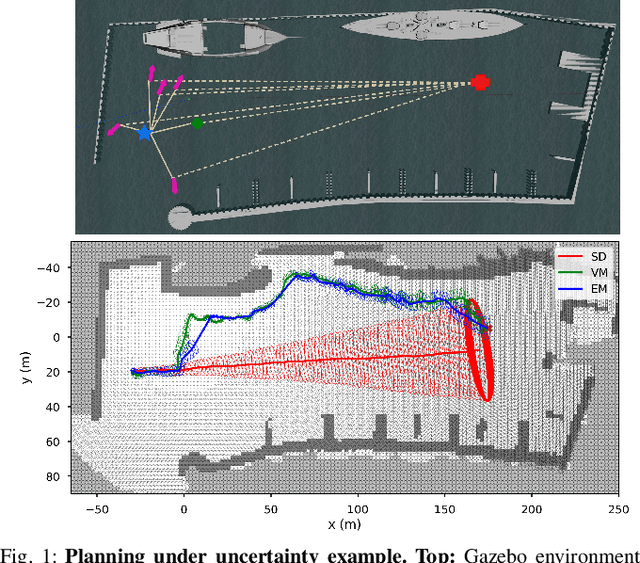
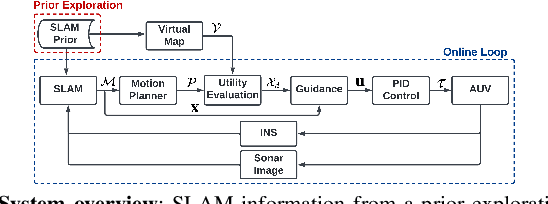
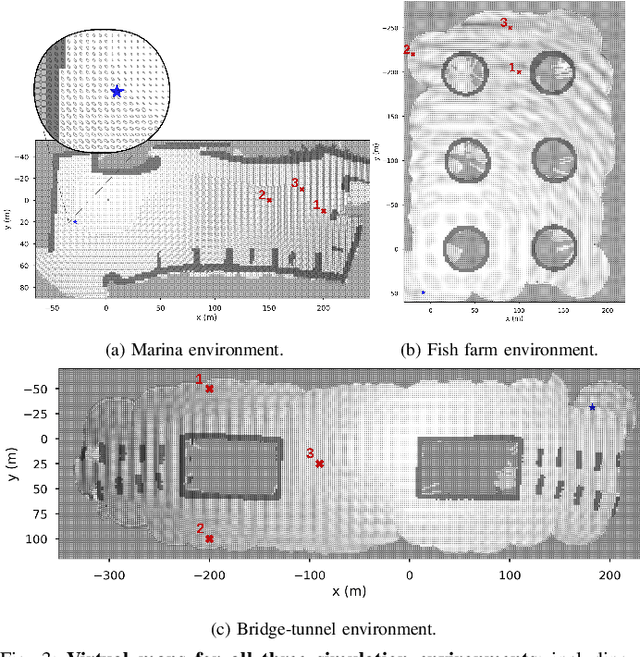
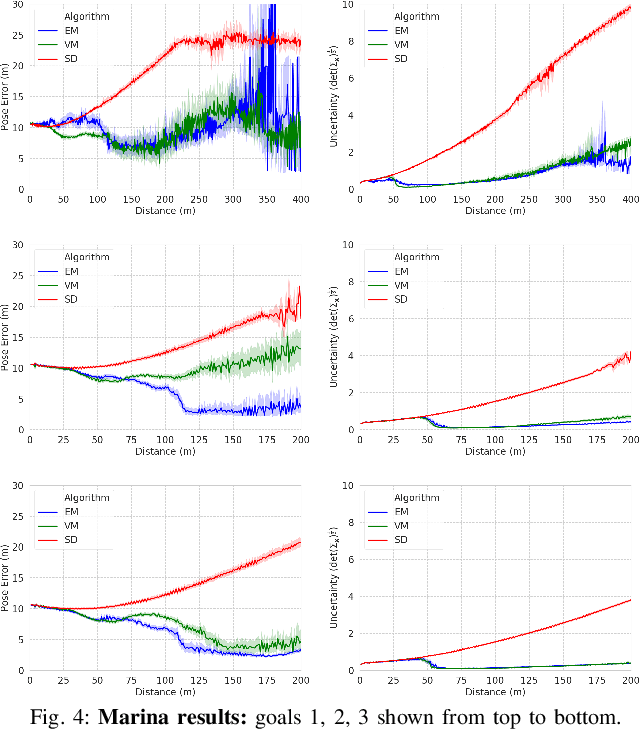
Reliable localization is an essential capability for marine robots navigating in GPS-denied environments. SLAM, commonly used to mitigate dead reckoning errors, still fails in feature-sparse environments or with limited-range sensors. Pose estimation can be improved by incorporating the uncertainty prediction of future poses into the planning process and choosing actions that reduce uncertainty. However, performing belief propagation is computationally costly, especially when operating in large-scale environments. This work proposes a computationally efficient planning under uncertainty frame-work suitable for large-scale, feature-sparse environments. Our strategy leverages SLAM graph and occupancy map data obtained from a prior exploration phase to create a virtual map, describing the uncertainty of each map cell using a multivariate Gaussian. The virtual map is then used as a cost map in the planning phase, and performing belief propagation at each step is avoided. A receding horizon planning strategy is implemented, managing a goal-reaching and uncertainty-reduction tradeoff. Simulation experiments in a realistic underwater environment validate this approach. Experimental comparisons against a full belief propagation approach and a standard shortest-distance approach are conducted.
Multi-Robot Autonomous Exploration and Mapping Under Localization Uncertainty with Expectation-Maximization
Mar 06, 2024


We propose an autonomous exploration algorithm designed for decentralized multi-robot teams, which takes into account map and localization uncertainties of range-sensing mobile robots. Virtual landmarks are used to quantify the combined impact of process noise and sensor noise on map uncertainty. Additionally, we employ an iterative expectation-maximization inspired algorithm to assess the potential outcomes of both a local robot's and its neighbors' next-step actions. To evaluate the effectiveness of our framework, we conduct a comparative analysis with state-of-the-art algorithms. The results of our experiments show the proposed algorithm's capacity to strike a balance between curbing map uncertainty and achieving efficient task allocation among robots.
Decentralized Multi-Robot Navigation for Autonomous Surface Vehicles with Distributional Reinforcement Learning
Feb 19, 2024


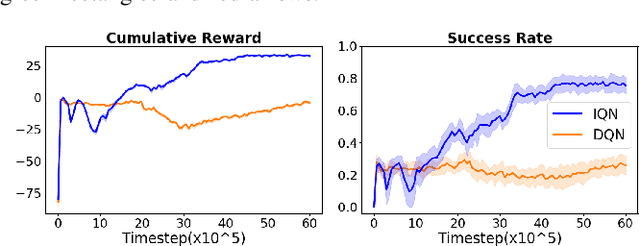
Collision avoidance algorithms for Autonomous Surface Vehicles (ASV) that follow the Convention on the International Regulations for Preventing Collisions at Sea (COLREGs) have been proposed in recent years. However, it may be difficult and unsafe to follow COLREGs in congested waters, where multiple ASVs are navigating in the presence of static obstacles and strong currents, due to the complex interactions. To address this problem, we propose a decentralized multi-ASV collision avoidance policy based on Distributional Reinforcement Learning, which considers the interactions among ASVs as well as with static obstacles and current flows. We evaluate the performance of the proposed Distributional RL based policy against a traditional RL-based policy and two classical methods, Artificial Potential Fields (APF) and Reciprocal Velocity Obstacles (RVO), in simulation experiments, which show that the proposed policy achieves superior performance in navigation safety, while requiring minimal travel time and energy. A variant of our framework that automatically adapts its risk sensitivity is also demonstrated to improve ASV safety in highly congested environments.