 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbove and Below: Heterogeneous Multi-robot SLAM Across Surface and Underwater Domains
May 10, 2026Multi-robot simultaneous localization and mapping (SLAM) is a fundamental task in multi-robot operations. Robots must have a common understanding of their location and that of their team members to complete coordinated actions. However, multi-robot SLAM between Uncrewed Surface Vessels (USVs) and Autonomous Underwater Vehicles (AUVs) has primarily been achieved through acoustic pinging between robots to retrieve range measurements; a measurement technique requires that robots to be in similar locations simultaneously, have an uninterrupted path for signal propagation, and may necessitate synchronized clocks. This is especially challenging in complex, cluttered maritime environments, where structures may impede signals. However, these same structures may be observable above and below the water's surface, presenting an opportunity for inter-robot SLAM loop closure between USV and AUV data streams. This work builds upon recent research on inter-robot SLAM loop closure between USV and AUV data, extending it to propose a centralized multi-robot SLAM system. Each robot performs its state estimation, and we detect loop closures between each AUV and the USV data. These inter-robot loop closures are used to merge each robot's state estimate into a centralized graph, yielding estimates for the whole time history of the USV and all AUVs in the system. Validation is performed using real-world perceptual data in three different environments. Results show improved errors for AUVs in the multi-robot SLAM system compared to single-robot SLAM over the same trajectories. To our knowledge, this is the first instance of a multi-robot SLAM system with AUVs and USVs built on loop closures rather than acoustic distance measurements.
Towards Versatile Opti-Acoustic Sensor Fusion and Volumetric Mapping
Mar 15, 2026Accurate 3D volumetric mapping is critical for autonomous underwater vehicles operating in obstacle-rich environments. Vision-based perception provides high-resolution data but fails in turbid conditions, while sonar is robust to lighting and turbidity but suffers from low resolution and elevation ambiguity. This paper presents a volumetric mapping framework that fuses a stereo sonar pair with a monocular camera to enable safe navigation under varying visibility conditions. Overlapping sonar fields of view resolve elevation ambiguity, producing fully defined 3D point clouds at each time step. The framework identifies regions of interest in camera images, associates them with corresponding sonar returns, and combines sonar range with camera-derived elevation cues to generate additional 3D points. Each 3D point is assigned a confidence value reflecting its reliability. These confidence-weighted points are fused using a Gaussian Process Volumetric Mapping framework that prioritizes the most reliable measurements. Experimental comparisons with other opti-acoustic and sonar-based approaches, along with field tests in a marina environment, demonstrate the method's effectiveness in capturing complex geometries and preserving critical information for robot navigation in both clear and turbid conditions. Our code is open-source to support community adoption.
DRACo-SLAM2: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar EquippedUnderwater Robot Teams with Object Graph Matching
Jul 31, 2025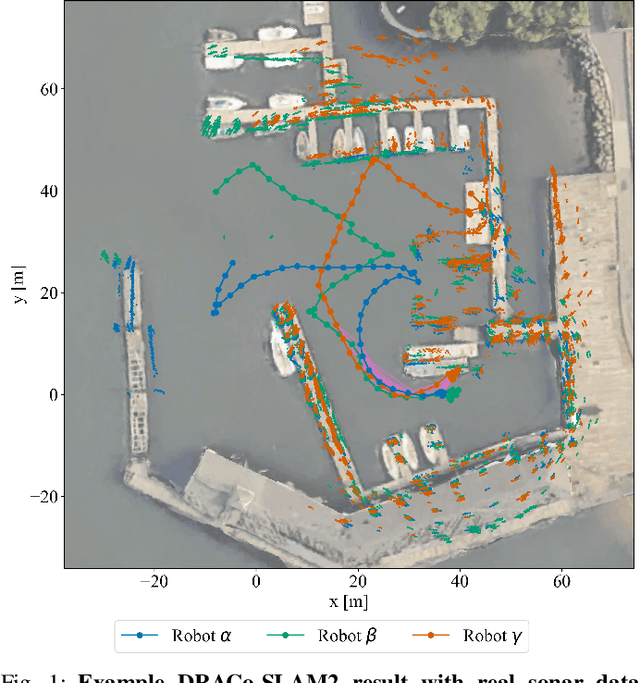
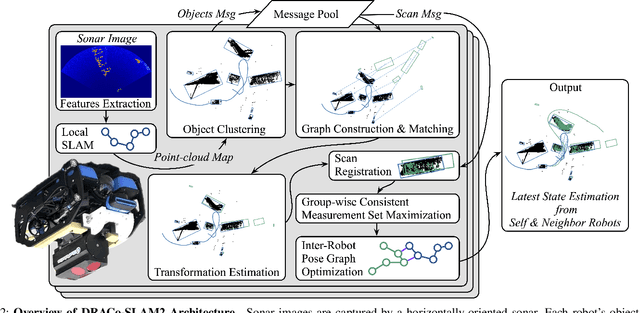
We present DRACo-SLAM2, a distributed SLAM framework for underwater robot teams equipped with multibeam imaging sonar. This framework improves upon the original DRACo-SLAM by introducing a novel representation of sonar maps as object graphs and utilizing object graph matching to achieve time-efficient inter-robot loop closure detection without relying on prior geometric information. To better-accommodate the needs and characteristics of underwater scan matching, we propose incremental Group-wise Consistent Measurement Set Maximization (GCM), a modification of Pairwise Consistent Measurement Set Maximization (PCM), which effectively handles scenarios where nearby inter-robot loop closures share similar registration errors. The proposed approach is validated through extensive comparative analyses on simulated and real-world datasets.
Large-Scale Dense 3D Mapping Using Submaps Derived From Orthogonal Imaging Sonars
Dec 04, 20243D situational awareness is critical for any autonomous system. However, when operating underwater, environmental conditions often dictate the use of acoustic sensors. These acoustic sensors are plagued by high noise and a lack of 3D information in sonar imagery, motivating the use of an orthogonal pair of imaging sonars to recover 3D perceptual data. Thus far, mapping systems in this area only use a subset of the available data at discrete timesteps and rely on object-level prior information in the environment to develop high-coverage 3D maps. Moreover, simple repeating objects must be present to build high-coverage maps. In this work, we propose a submap-based mapping system integrated with a simultaneous localization and mapping (SLAM) system to produce dense, 3D maps of complex unknown environments with varying densities of simple repeating objects. We compare this submapping approach to our previous works in this area, analyzing simple and highly complex environments, such as submerged aircraft. We analyze the tradeoffs between a submapping-based approach and our previous work leveraging simple repeating objects. We show where each method is well-motivated and where they fall short. Importantly, our proposed use of submapping achieves an advance in underwater situational awareness with wide aperture multi-beam imaging sonar, moving toward generalized large-scale dense 3D mapping capability for fully unknown complex environments.
Unlocking the Archives: Using Large Language Models to Transcribe Handwritten Historical Documents
Nov 02, 2024



This study demonstrates that Large Language Models (LLMs) can transcribe historical handwritten documents with significantly higher accuracy than specialized Handwritten Text Recognition (HTR) software, while being faster and more cost-effective. We introduce an open-source software tool called Transcription Pearl that leverages these capabilities to automatically transcribe and correct batches of handwritten documents using commercially available multimodal LLMs from OpenAI, Anthropic, and Google. In tests on a diverse corpus of 18th/19th century English language handwritten documents, LLMs achieved Character Error Rates (CER) of 5.7 to 7% and Word Error Rates (WER) of 8.9 to 15.9%, improvements of 14% and 32% respectively over specialized state-of-the-art HTR software like Transkribus. Most significantly, when LLMs were then used to correct those transcriptions as well as texts generated by conventional HTR software, they achieved near-human levels of accuracy, that is CERs as low as 1.8% and WERs of 3.5%. The LLMs also completed these tasks 50 times faster and at approximately 1/50th the cost of proprietary HTR programs. These results demonstrate that when LLMs are incorporated into software tools like Transcription Pearl, they provide an accessible, fast, and highly accurate method for mass transcription of historical handwritten documents, significantly streamlining the digitization process.
Real-Time Planning Under Uncertainty for AUVs Using Virtual Maps
Mar 07, 2024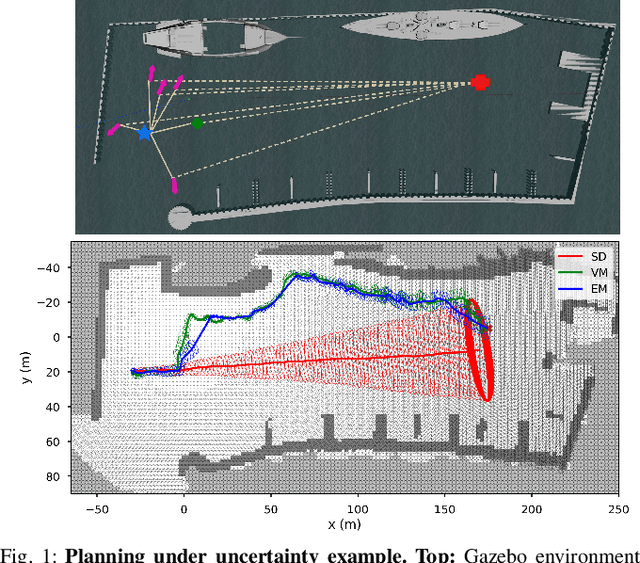
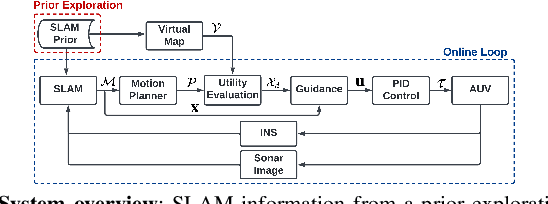
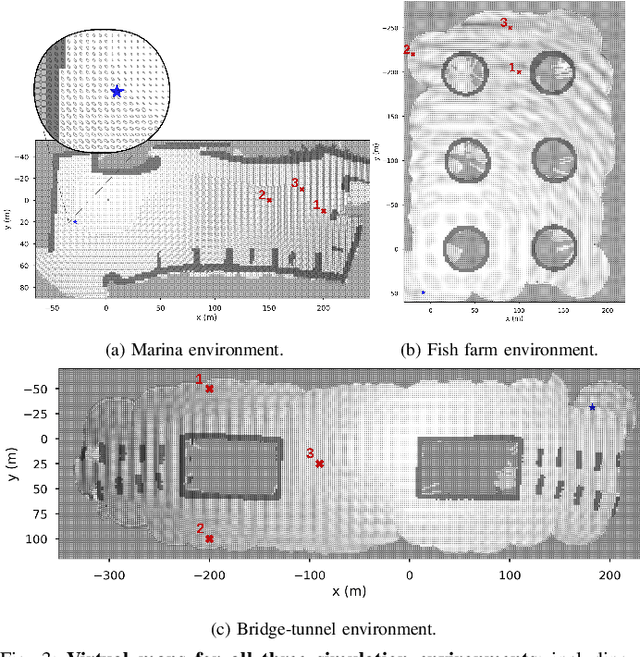
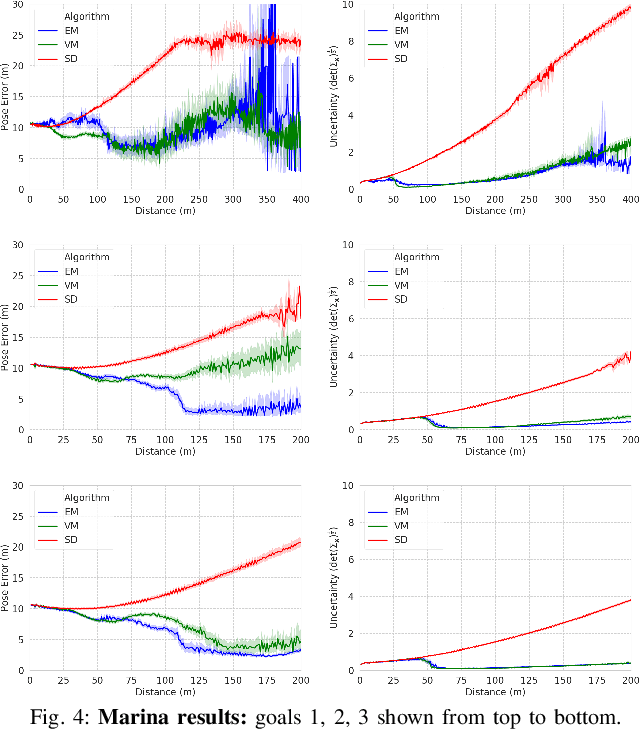
Reliable localization is an essential capability for marine robots navigating in GPS-denied environments. SLAM, commonly used to mitigate dead reckoning errors, still fails in feature-sparse environments or with limited-range sensors. Pose estimation can be improved by incorporating the uncertainty prediction of future poses into the planning process and choosing actions that reduce uncertainty. However, performing belief propagation is computationally costly, especially when operating in large-scale environments. This work proposes a computationally efficient planning under uncertainty frame-work suitable for large-scale, feature-sparse environments. Our strategy leverages SLAM graph and occupancy map data obtained from a prior exploration phase to create a virtual map, describing the uncertainty of each map cell using a multivariate Gaussian. The virtual map is then used as a cost map in the planning phase, and performing belief propagation at each step is avoided. A receding horizon planning strategy is implemented, managing a goal-reaching and uncertainty-reduction tradeoff. Simulation experiments in a realistic underwater environment validate this approach. Experimental comparisons against a full belief propagation approach and a standard shortest-distance approach are conducted.
Robust Unmanned Surface Vehicle Navigation with Distributional Reinforcement Learning
Jul 30, 2023Autonomous navigation of Unmanned Surface Vehicles (USV) in marine environments with current flows is challenging, and few prior works have addressed the sensorbased navigation problem in such environments under no prior knowledge of the current flow and obstacles. We propose a Distributional Reinforcement Learning (RL) based local path planner that learns return distributions which capture the uncertainty of action outcomes, and an adaptive algorithm that automatically tunes the level of sensitivity to the risk in the environment. The proposed planner achieves a more stable learning performance and converges to safer policies than a traditional RL based planner. Computational experiments demonstrate that comparing to a traditional RL based planner and classical local planning methods such as Artificial Potential Fields and the Bug Algorithm, the proposed planner is robust against environmental flows, and is able to plan trajectories that are superior in safety, time and energy consumption.
DRACo-SLAM: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar Equipped Underwater Robot Teams
Oct 03, 2022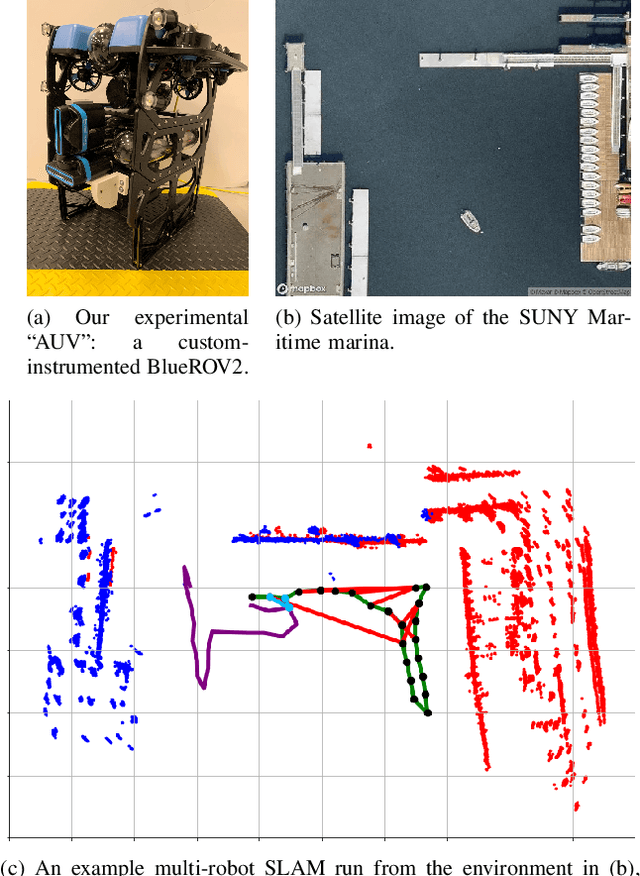
An essential task for a multi-robot system is generating a common understanding of the environment and relative poses between robots. Cooperative tasks can be executed only when a vehicle has knowledge of its own state and the states of the team members. However, this has primarily been achieved with direct rendezvous between underwater robots, via inter-robot ranging. We propose a novel distributed multi-robot simultaneous localization and mapping (SLAM) framework for underwater robots using imaging sonar-based perception. By passing only scene descriptors between robots, we do not need to pass raw sensor data unless there is a likelihood of inter-robot loop closure. We utilize pairwise consistent measurement set maximization (PCM), making our system robust to erroneous loop closures. The functionality of our system is demonstrated using two real-world datasets, one with three robots and another with two robots. We show that our system effectively estimates the trajectories of the multi-robot system and keeps the bandwidth requirements of inter-robot communication low. To our knowledge, this paper describes the first instance of multi-robot SLAM using real imaging sonar data (which we implement offline, using simulated communication). Code link: https://github.com/jake3991/DRACo-SLAM.
Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments
Feb 16, 2022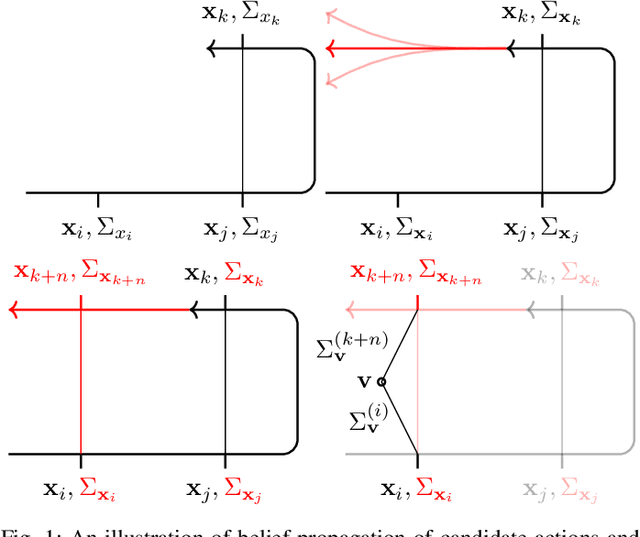
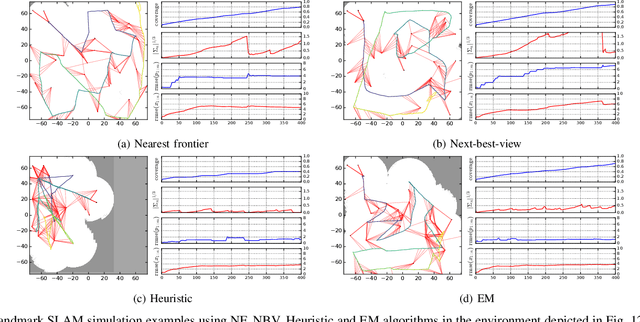
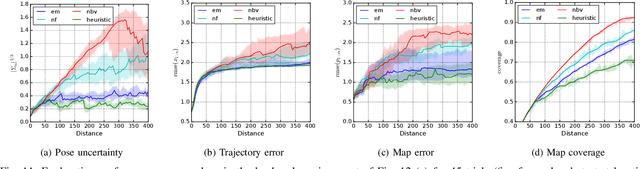
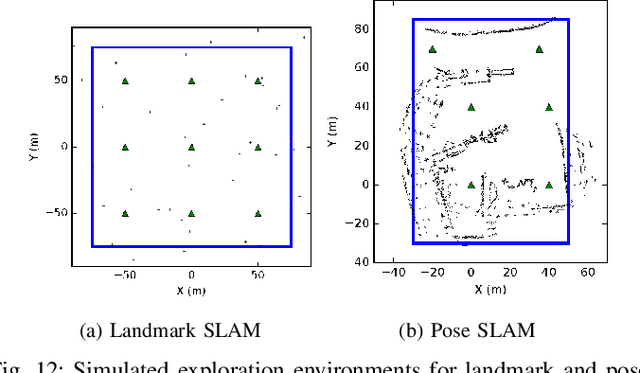
We consider the problem of autonomous mobile robot exploration in an unknown environment, taking into account a robot's coverage rate, map uncertainty, and state estimation uncertainty. This paper presents a novel exploration framework for underwater robots operating in cluttered environments, built upon simultaneous localization and mapping (SLAM) with imaging sonar. The proposed system comprises path generation, place recognition forecasting, belief propagation and utility evaluation using a virtual map, which estimates the uncertainty associated with map cells throughout a robot's workspace. We evaluate the performance of this framework in simulated experiments, showing that our algorithm maintains a high coverage rate during exploration while also maintaining low mapping and localization error. The real-world applicability of our framework is also demonstrated on an underwater remotely operated vehicle (ROV) exploring a harbor environment.
Overhead Image Factors for Underwater Sonar-based SLAM
Feb 11, 2022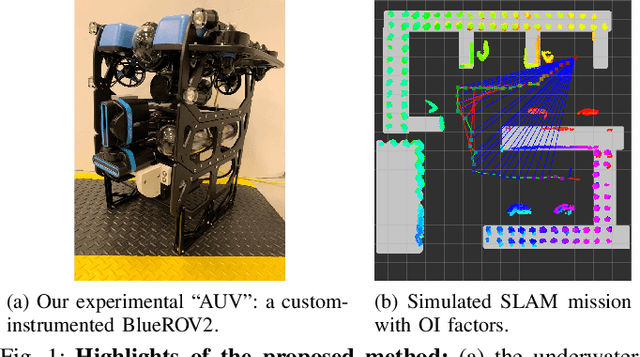
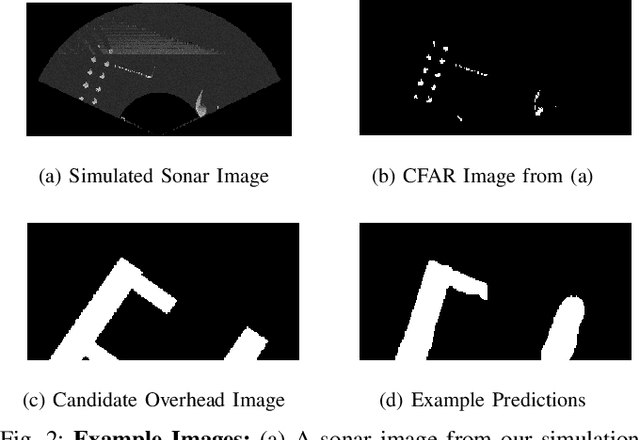
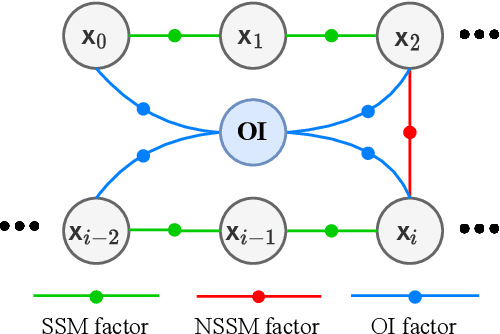
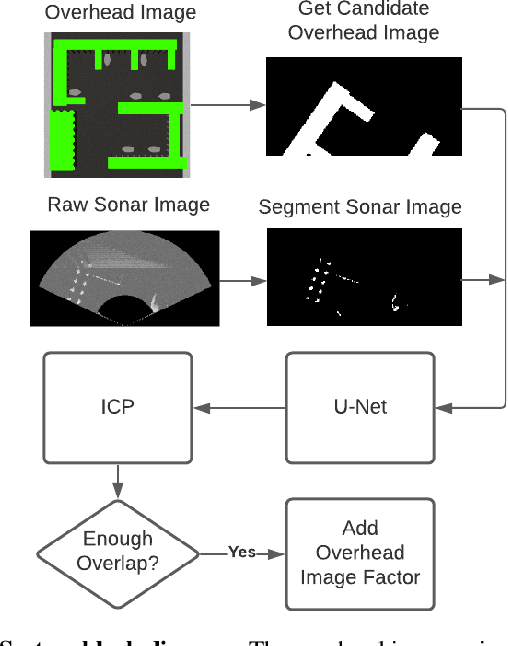
Simultaneous localization and mapping (SLAM) is a critical capability for any autonomous underwater vehicle (AUV). However, robust, accurate state estimation is still a work in progress when using low-cost sensors. We propose enhancing a typical low-cost sensor package using widely available and often free prior information; overhead imagery. Given an AUV's sonar image and a partially overlapping, globally-referenced overhead image, we propose using a convolutional neural network (CNN) to generate a synthetic overhead image predicting the above-surface appearance of the sonar image contents. We then use this synthetic overhead image to register our observations to the provided global overhead image. Once registered, the transformation is introduced as a factor into a pose SLAM factor graph. We use a state-of-the-art simulation environment to perform validation over a series of benchmark trajectories and quantitatively show the improved accuracy of robot state estimation using the proposed approach. We also show qualitative outcomes from a real AUV field deployment. Video attachment: https://youtu.be/_uWljtp58ks