 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Multi-Robot Navigation for Autonomous Surface Vehicles with Distributional Reinforcement Learning
Feb 19, 2024


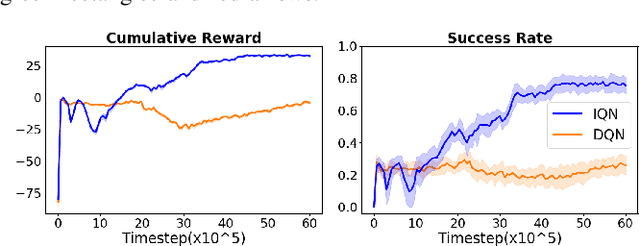
Collision avoidance algorithms for Autonomous Surface Vehicles (ASV) that follow the Convention on the International Regulations for Preventing Collisions at Sea (COLREGs) have been proposed in recent years. However, it may be difficult and unsafe to follow COLREGs in congested waters, where multiple ASVs are navigating in the presence of static obstacles and strong currents, due to the complex interactions. To address this problem, we propose a decentralized multi-ASV collision avoidance policy based on Distributional Reinforcement Learning, which considers the interactions among ASVs as well as with static obstacles and current flows. We evaluate the performance of the proposed Distributional RL based policy against a traditional RL-based policy and two classical methods, Artificial Potential Fields (APF) and Reciprocal Velocity Obstacles (RVO), in simulation experiments, which show that the proposed policy achieves superior performance in navigation safety, while requiring minimal travel time and energy. A variant of our framework that automatically adapts its risk sensitivity is also demonstrated to improve ASV safety in highly congested environments.
Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments
Feb 16, 2022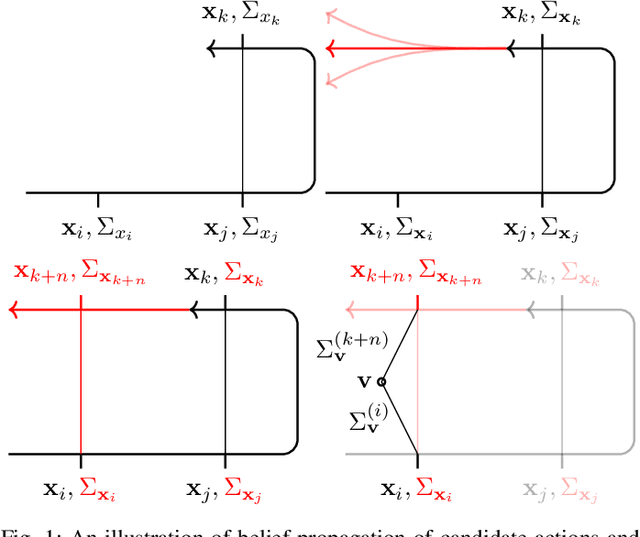
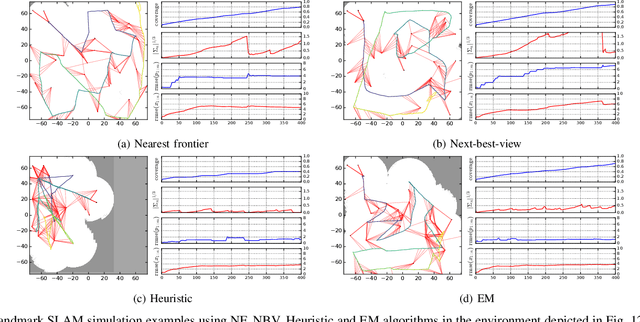
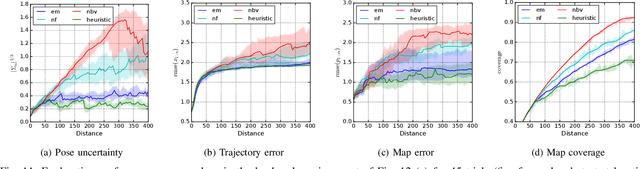
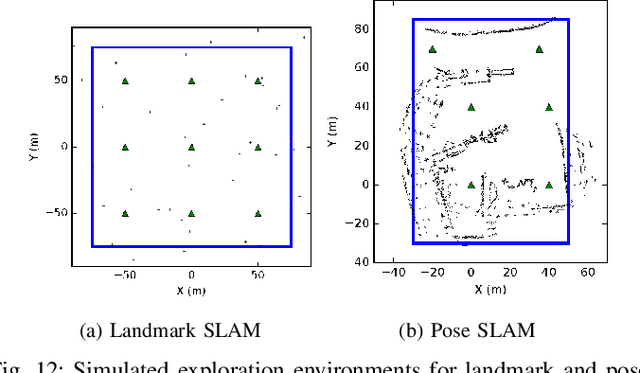
We consider the problem of autonomous mobile robot exploration in an unknown environment, taking into account a robot's coverage rate, map uncertainty, and state estimation uncertainty. This paper presents a novel exploration framework for underwater robots operating in cluttered environments, built upon simultaneous localization and mapping (SLAM) with imaging sonar. The proposed system comprises path generation, place recognition forecasting, belief propagation and utility evaluation using a virtual map, which estimates the uncertainty associated with map cells throughout a robot's workspace. We evaluate the performance of this framework in simulated experiments, showing that our algorithm maintains a high coverage rate during exploration while also maintaining low mapping and localization error. The real-world applicability of our framework is also demonstrated on an underwater remotely operated vehicle (ROV) exploring a harbor environment.
Overhead Image Factors for Underwater Sonar-based SLAM
Feb 11, 2022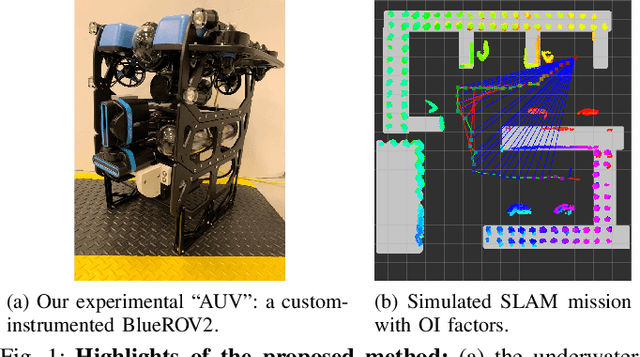
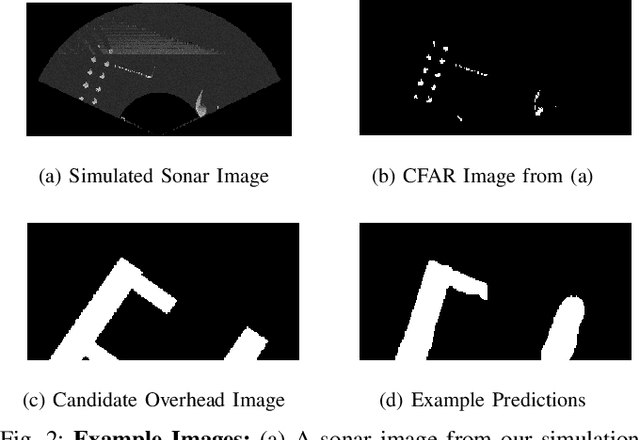
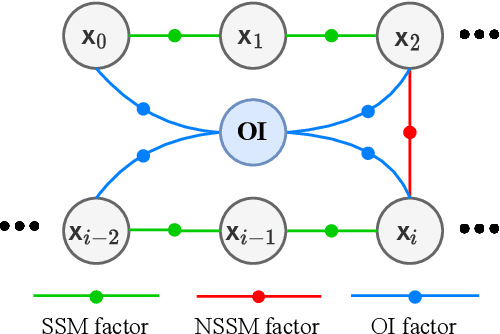
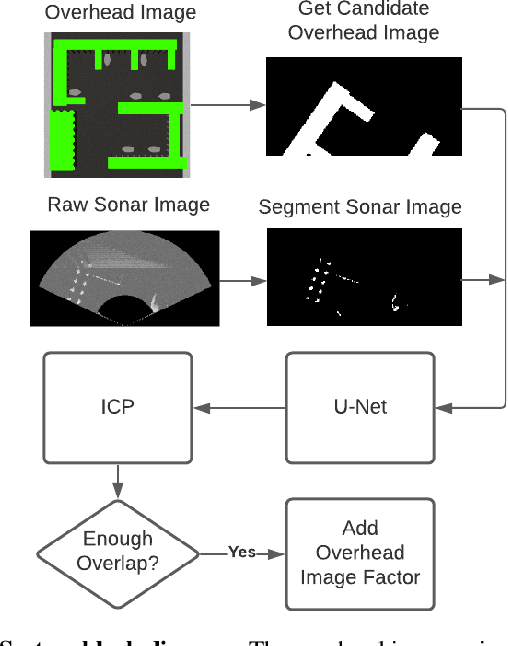
Simultaneous localization and mapping (SLAM) is a critical capability for any autonomous underwater vehicle (AUV). However, robust, accurate state estimation is still a work in progress when using low-cost sensors. We propose enhancing a typical low-cost sensor package using widely available and often free prior information; overhead imagery. Given an AUV's sonar image and a partially overlapping, globally-referenced overhead image, we propose using a convolutional neural network (CNN) to generate a synthetic overhead image predicting the above-surface appearance of the sonar image contents. We then use this synthetic overhead image to register our observations to the provided global overhead image. Once registered, the transformation is introduced as a factor into a pose SLAM factor graph. We use a state-of-the-art simulation environment to perform validation over a series of benchmark trajectories and quantitatively show the improved accuracy of robot state estimation using the proposed approach. We also show qualitative outcomes from a real AUV field deployment. Video attachment: https://youtu.be/_uWljtp58ks
Zero-Shot Reinforcement Learning on Graphs for Autonomous Exploration Under Uncertainty
May 11, 2021

This paper studies the problem of autonomous exploration under localization uncertainty for a mobile robot with 3D range sensing. We present a framework for self-learning a high-performance exploration policy in a single simulation environment, and transferring it to other environments, which may be physical or virtual. Recent work in transfer learning achieves encouraging performance by domain adaptation and domain randomization to expose an agent to scenarios that fill the inherent gaps in sim2sim and sim2real approaches. However, it is inefficient to train an agent in environments with randomized conditions to learn the important features of its current state. An agent can use domain knowledge provided by human experts to learn efficiently. We propose a novel approach that uses graph neural networks in conjunction with deep reinforcement learning, enabling decision-making over graphs containing relevant exploration information provided by human experts to predict a robot's optimal sensing action in belief space. The policy, which is trained only in a single simulation environment, offers a real-time, scalable, and transferable decision-making strategy, resulting in zero-shot transfer to other simulation environments and even real-world environments.
Autonomous Exploration Under Uncertainty via Deep Reinforcement Learning on Graphs
Jul 24, 2020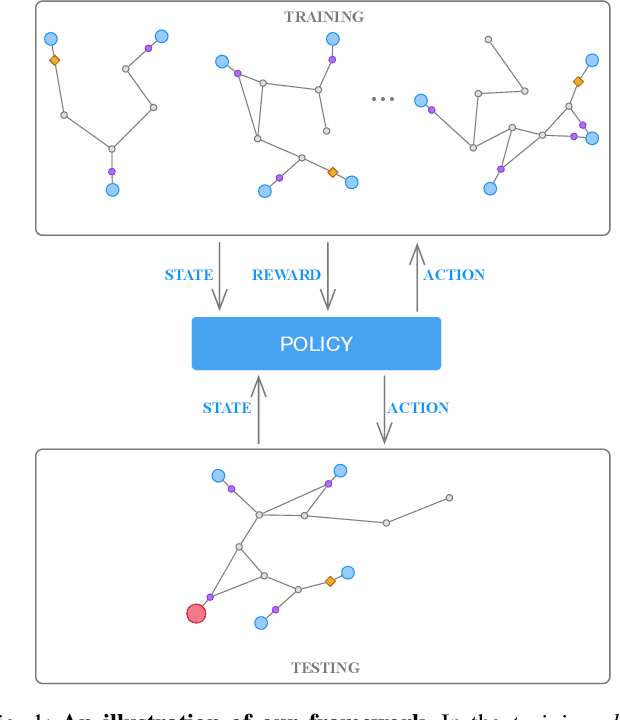
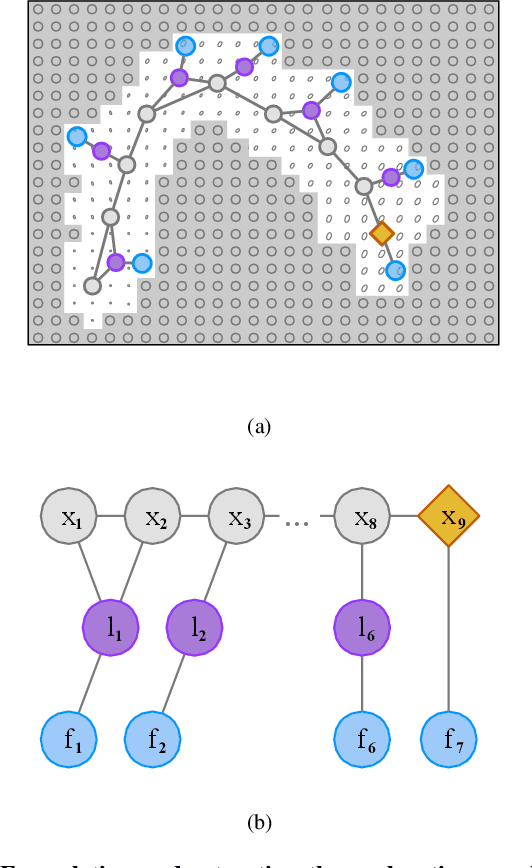
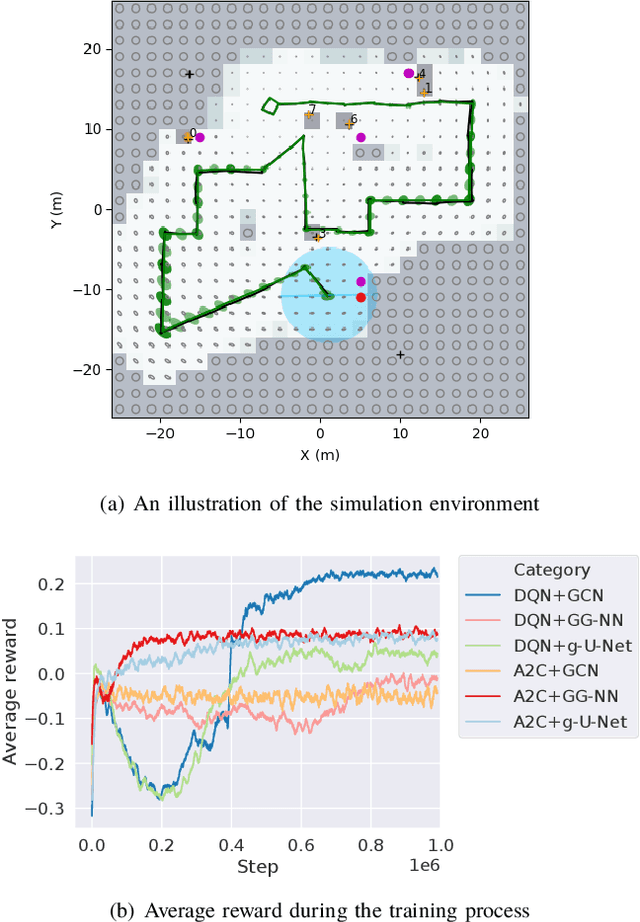
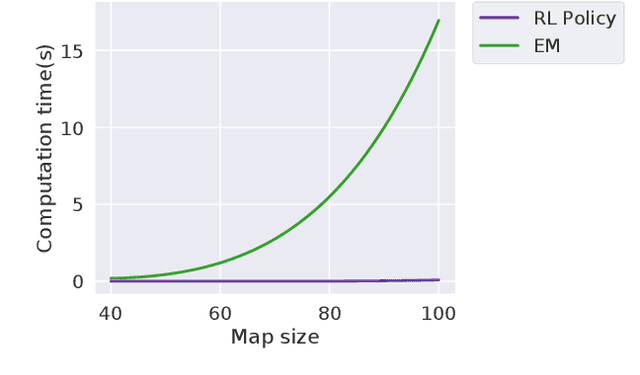
We consider an autonomous exploration problem in which a range-sensing mobile robot is tasked with accurately mapping the landmarks in an a priori unknown environment efficiently in real-time; it must choose sensing actions that both curb localization uncertainty and achieve information gain. For this problem, belief space planning methods that forward-simulate robot sensing and estimation may often fail in real-time implementation, scaling poorly with increasing size of the state, belief and action spaces. We propose a novel approach that uses graph neural networks (GNNs) in conjunction with deep reinforcement learning (DRL), enabling decision-making over graphs containing exploration information to predict a robot's optimal sensing action in belief space. The policy, which is trained in different random environments without human intervention, offers a real-time, scalable decision-making process whose high-performance exploratory sensing actions yield accurate maps and high rates of information gain.
Simulation-based Lidar Super-resolution for Ground Vehicles
Apr 10, 2020
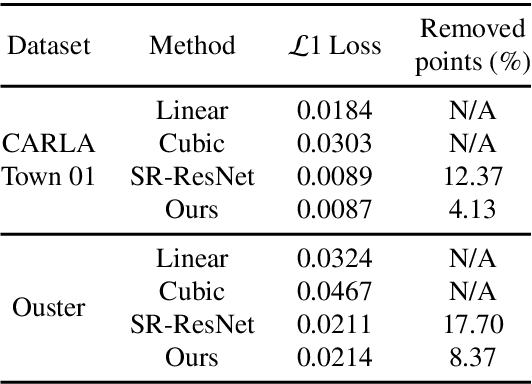
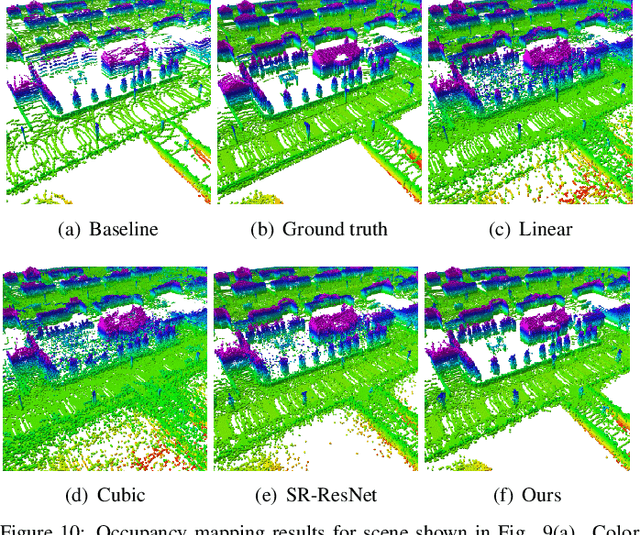
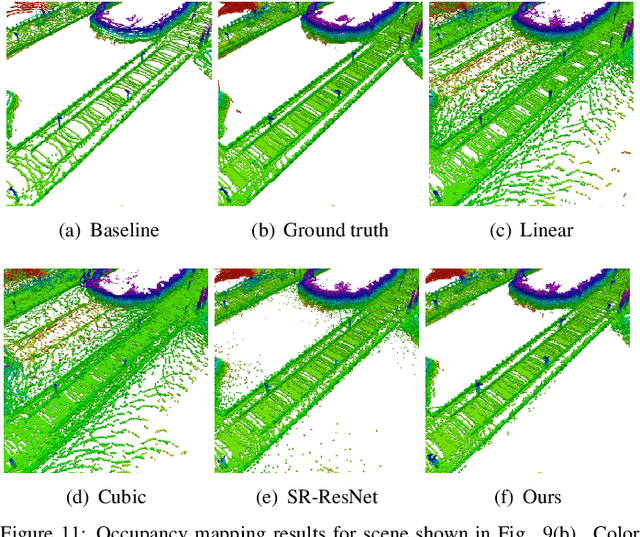
We propose a methodology for lidar super-resolution with ground vehicles driving on roadways, which relies completely on a driving simulator to enhance, via deep learning, the apparent resolution of a physical lidar. To increase the resolution of the point cloud captured by a sparse 3D lidar, we convert this problem from 3D Euclidean space into an image super-resolution problem in 2D image space, which is solved using a deep convolutional neural network. By projecting a point cloud onto a range image, we are able to efficiently enhance the resolution of such an image using a deep neural network. Typically, the training of a deep neural network requires vast real-world data. Our approach does not require any real-world data, as we train the network purely using computer-generated data. Thus our method is applicable to the enhancement of any type of 3D lidar theoretically. By novelly applying Monte-Carlo dropout in the network and removing the predictions with high uncertainty, our method produces high accuracy point clouds comparable with the observations of a real high resolution lidar. We present experimental results applying our method to several simulated and real-world datasets. We argue for the method's potential benefits in real-world robotics applications such as occupancy mapping and terrain modeling.