 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based Lidar Super-resolution for Ground Vehicles
Paper and Code

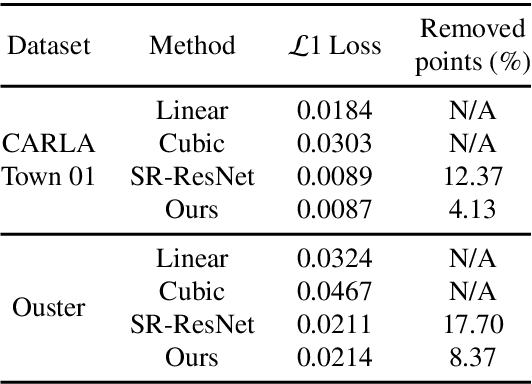
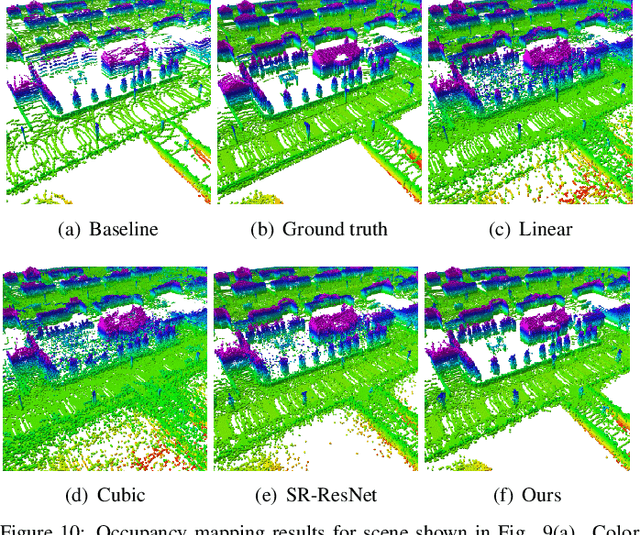
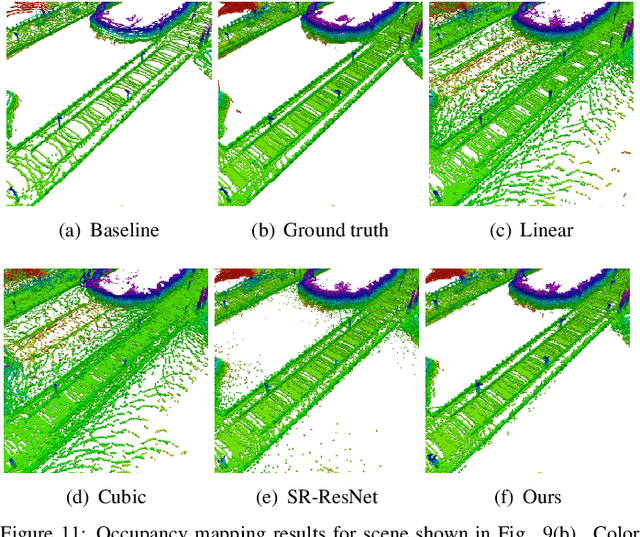
We propose a methodology for lidar super-resolution with ground vehicles driving on roadways, which relies completely on a driving simulator to enhance, via deep learning, the apparent resolution of a physical lidar. To increase the resolution of the point cloud captured by a sparse 3D lidar, we convert this problem from 3D Euclidean space into an image super-resolution problem in 2D image space, which is solved using a deep convolutional neural network. By projecting a point cloud onto a range image, we are able to efficiently enhance the resolution of such an image using a deep neural network. Typically, the training of a deep neural network requires vast real-world data. Our approach does not require any real-world data, as we train the network purely using computer-generated data. Thus our method is applicable to the enhancement of any type of 3D lidar theoretically. By novelly applying Monte-Carlo dropout in the network and removing the predictions with high uncertainty, our method produces high accuracy point clouds comparable with the observations of a real high resolution lidar. We present experimental results applying our method to several simulated and real-world datasets. We argue for the method's potential benefits in real-world robotics applications such as occupancy mapping and terrain modeling.