 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRACo-SLAM: Distributed Robust Acoustic Communication-efficient SLAM for Imaging Sonar Equipped Underwater Robot Teams
Paper and Code
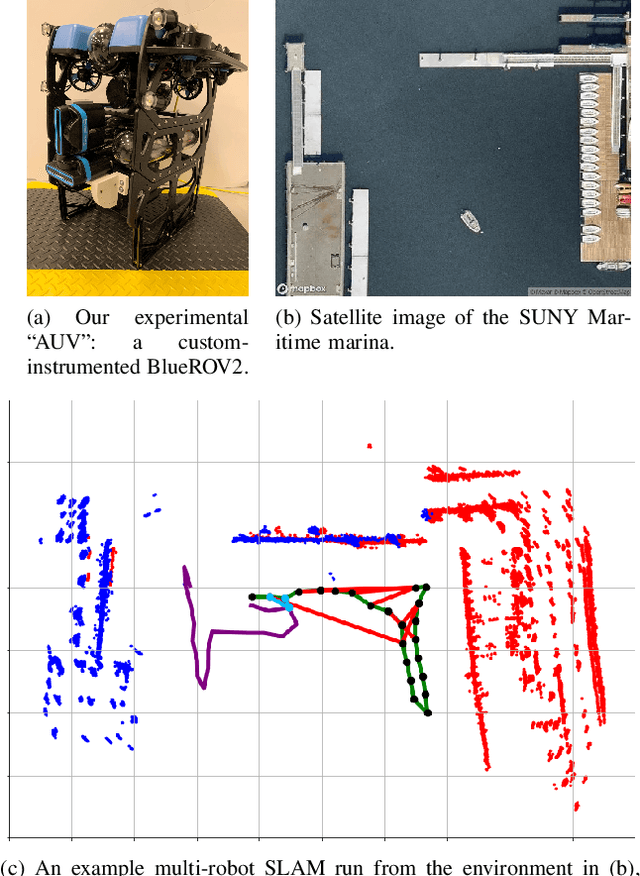
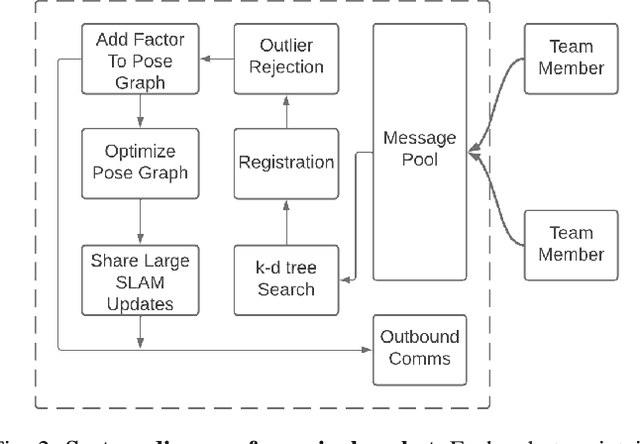
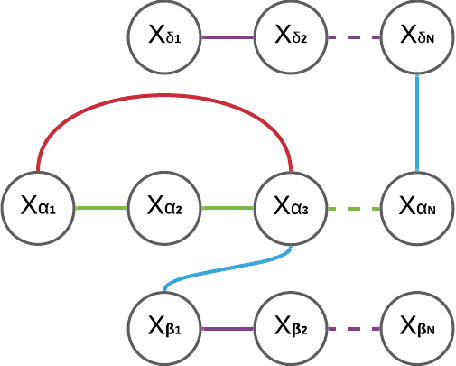
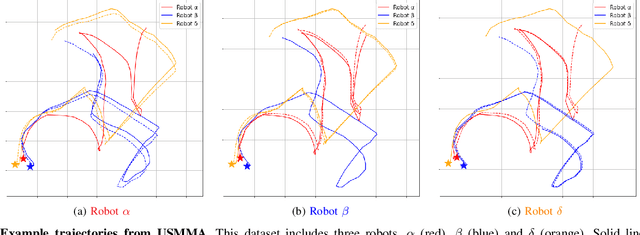
An essential task for a multi-robot system is generating a common understanding of the environment and relative poses between robots. Cooperative tasks can be executed only when a vehicle has knowledge of its own state and the states of the team members. However, this has primarily been achieved with direct rendezvous between underwater robots, via inter-robot ranging. We propose a novel distributed multi-robot simultaneous localization and mapping (SLAM) framework for underwater robots using imaging sonar-based perception. By passing only scene descriptors between robots, we do not need to pass raw sensor data unless there is a likelihood of inter-robot loop closure. We utilize pairwise consistent measurement set maximization (PCM), making our system robust to erroneous loop closures. The functionality of our system is demonstrated using two real-world datasets, one with three robots and another with two robots. We show that our system effectively estimates the trajectories of the multi-robot system and keeps the bandwidth requirements of inter-robot communication low. To our knowledge, this paper describes the first instance of multi-robot SLAM using real imaging sonar data (which we implement offline, using simulated communication). Code link: https://github.com/jake3991/DRACo-SLAM.