 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFauna Sprout: A lightweight, approachable, developer-ready humanoid robot
Jan 26, 2026Recent advances in learned control, large-scale simulation, and generative models have accelerated progress toward general-purpose robotic controllers, yet the field still lacks platforms suitable for safe, expressive, long-term deployment in human environments. Most existing humanoids are either closed industrial systems or academic prototypes that are difficult to deploy and operate around people, limiting progress in robotics. We introduce Sprout, a developer platform designed to address these limitations through an emphasis on safety, expressivity, and developer accessibility. Sprout adopts a lightweight form factor with compliant control, limited joint torques, and soft exteriors to support safe operation in shared human spaces. The platform integrates whole-body control, manipulation with integrated grippers, and virtual-reality-based teleoperation within a unified hardware-software stack. An expressive head further enables social interaction -- a domain that remains underexplored on most utilitarian humanoids. By lowering physical and technical barriers to deployment, Sprout expands access to capable humanoid platforms and provides a practical basis for developing embodied intelligence in real human environments.
Mobile Manipulation Platform for Autonomous Indoor Inspections in Low-Clearance Areas
Sep 19, 2023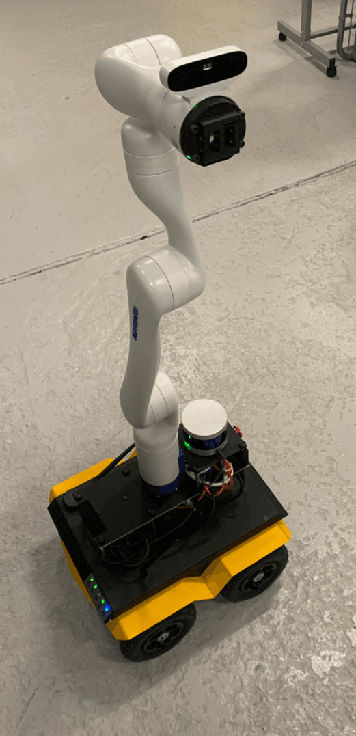
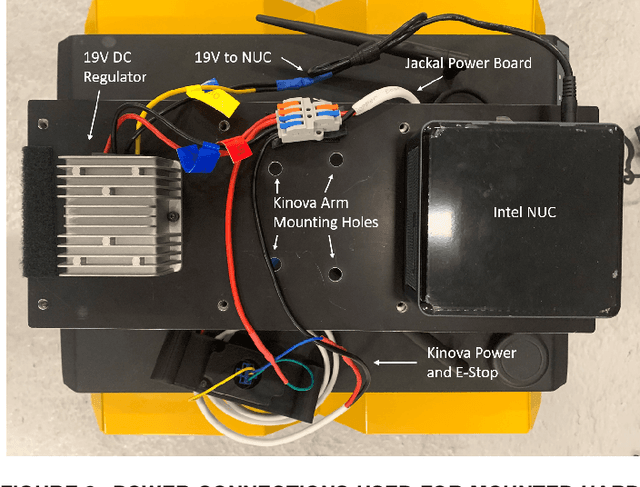
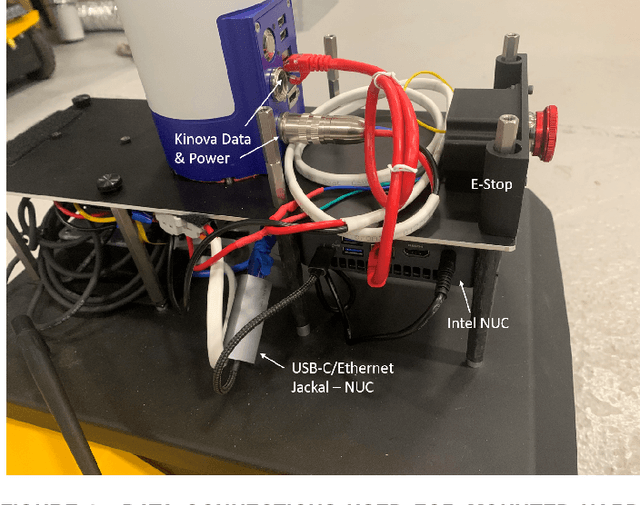
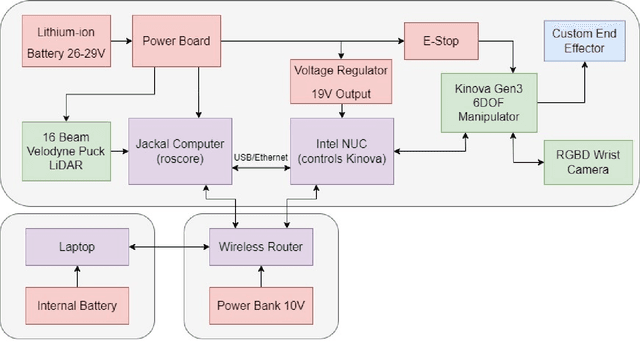
Mobile manipulators have been used for inspection, maintenance and repair tasks over the years, but there are some key limitations. Stability concerns typically require mobile platforms to be large in order to handle far-reaching manipulators, or for the manipulators to have drastically reduced workspaces to fit onto smaller mobile platforms. Therefore we propose a combination of two widely-used robots, the Clearpath Jackal unmanned ground vehicle and the Kinova Gen3 six degree-of-freedom manipulator. The Jackal has a small footprint and works well in low-clearance indoor environments. Extensive testing of localization, navigation and mapping using LiDAR sensors makes the Jackal a well developed mobile platform suitable for mobile manipulation. The Gen3 has a long reach with reasonable power consumption for manipulation tasks. A wrist camera for RGB-D sensing and a customizable end effector interface makes the Gen3 suitable for a myriad of manipulation tasks. Typically these features would result in an unstable platform, however with a few minor hardware and software modifications, we have produced a stable, high-performance mobile manipulation platform with significant mobility, reach, sensing, and maneuverability for indoor inspection tasks, without degradation of the component robots' individual capabilities. These assertions were investigated with hardware via semi-autonomous navigation to waypoints in a busy indoor environment, and high-precision self-alignment alongside planar structures for intervention tasks.
A Robust and Rapidly Deployable Waypoint Navigation Architecture for Long-Duration Operations in GPS-Denied Environments
Aug 10, 2023
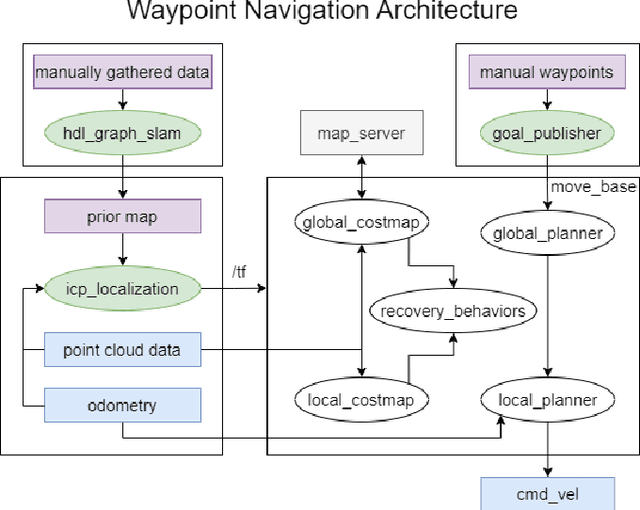
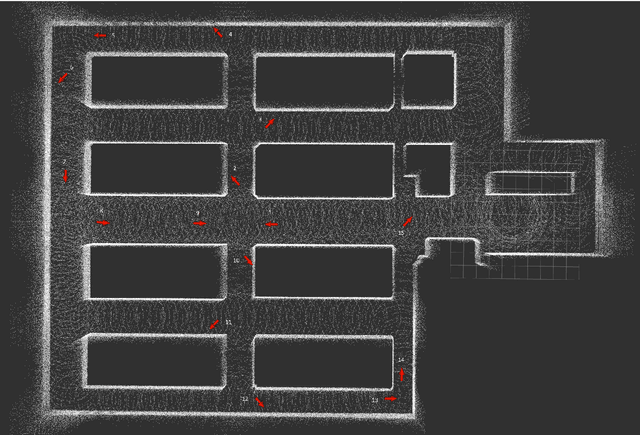
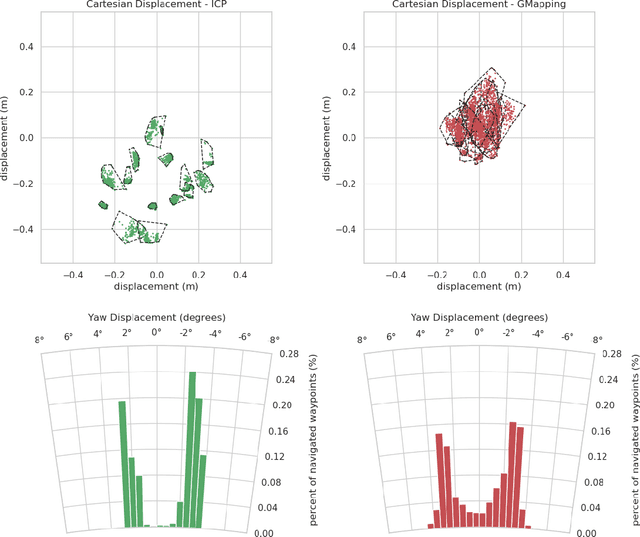
For long-duration operations in GPS-denied environments, accurate and repeatable waypoint navigation is an essential capability. While simultaneous localization and mapping (SLAM) works well for single-session operations, repeated, multi-session operations require robots to navigate to the same spot(s) accurately and precisely each and every time. Localization and navigation errors can build up from one session to the next if they are not accounted for. Localization using a global reference map works well, but there are no publicly available packages for quickly building maps and navigating with them. We propose a new architecture using a combination of two publicly available packages with a newly released package to create a fully functional multi-session navigation system for ground vehicles. The system takes just a few hours from the beginning of the first manual scan to perform autonomous waypoint navigation.