 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fully-autonomous Framework of Unmanned Surface Vehicles in Maritime Environments using Gaussian Process Motion Planning
Paper and Code

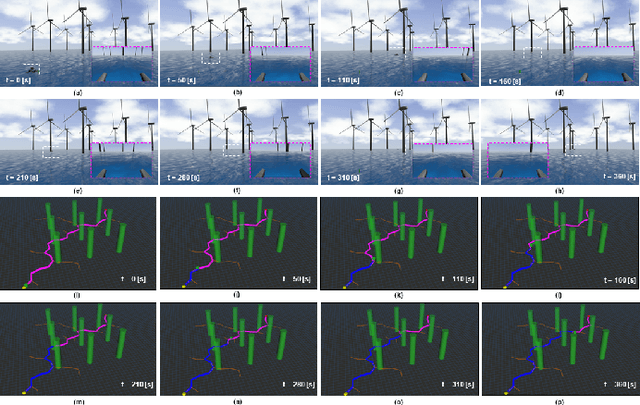


Unmanned surface vehicles (USVs) are of increasing importance to a growing number of sectors in the maritime industry, including offshore exploration, marine transportation and defence operations. A major factor in the growth in use and deployment of USVs is the increased operational flexibility that is offered through use of autonomous navigation systems that generate optimised trajectories. Unlike path planning in terrestrial environments, planning in the maritime environment is more demanding as there is need to assure mitigating action is taken against the significant, random and often unpredictable environmental influences from winds and ocean currents. With the focus of these necessary requirements as the main basis of motivation, this paper proposes a novel motion planner, denoted as GPMP2*, extending the application scope of the fundamental GP-based motion planner, GPMP2, into complex maritime environments. An interpolation strategy based on Monte-Carlo stochasticity has been innovatively added to GPMP2* to produce a new algorithm named GPMP2* with Monte-Carlo stochasticity (MC-GPMP2*), which can increase the diversity of the paths generated. In parallel with algorithm design, a ROS based fully-autonomous framework for an advanced unmanned surface vehicle, the WAM-V 20 USV, has been proposed. The practicability of the proposed motion planner as well as the fully-autonomous framework have been functionally validated in a simulated inspection missions for an offshore wind farm in ROS.