 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerification and Validation of a Vision-Based Landing System for Autonomous VTOL Air Taxis
Dec 11, 2024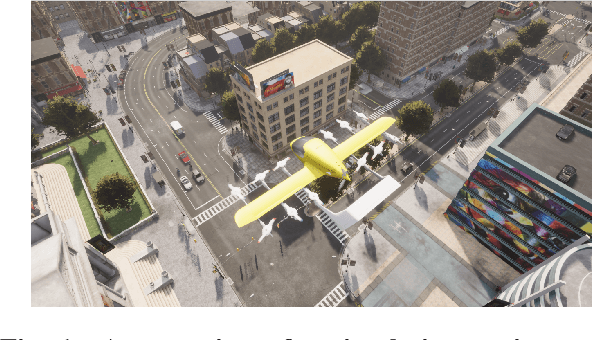
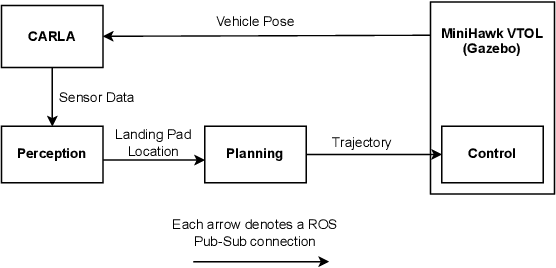
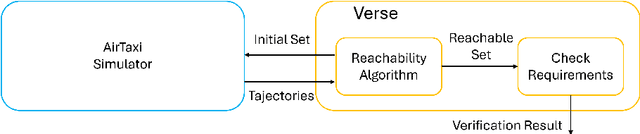
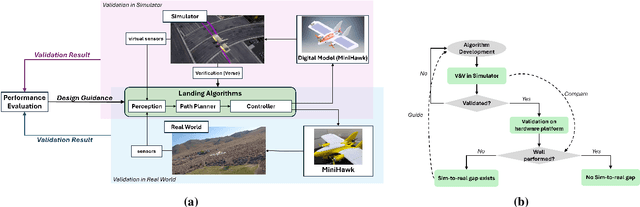
Autonomous air taxis are poised to revolutionize urban mass transportation, however, ensuring their safety and reliability remains an open challenge. Validating autonomy solutions on air taxis in the real world presents complexities, risks, and costs that further convolute this challenge. Verification and Validation (V&V) frameworks play a crucial role in the design and development of highly reliable systems by formally verifying safety properties and validating algorithm behavior across diverse operational scenarios. Advancements in high-fidelity simulators have significantly enhanced their capability to emulate real-world conditions, encouraging their use for validating autonomous air taxi solutions, especially during early development stages. This evolution underscores the growing importance of simulation environments, not only as complementary tools to real-world testing but as essential platforms for evaluating algorithms in a controlled, reproducible, and scalable manner. This work presents a V&V framework for a vision-based landing system for air taxis with vertical take-off and landing (VTOL) capabilities. Specifically, we use Verse, a tool for formal verification, to model and verify the safety of the system by obtaining and analyzing the reachable sets. To conduct this analysis, we utilize a photorealistic simulation environment. The simulation environment, built on Unreal Engine, provides realistic terrain, weather, and sensor characteristics to emulate real-world conditions with high fidelity. To validate the safety analysis results, we conduct extensive scenario-based testing to assess the reachability set and robustness of the landing algorithm in various conditions. This approach showcases the representativeness of high-fidelity simulators, offering an effective means to analyze and refine algorithms before real-world deployment.
Bayesian Data Augmentation and Training for Perception DNN in Autonomous Aerial Vehicles
Dec 10, 2024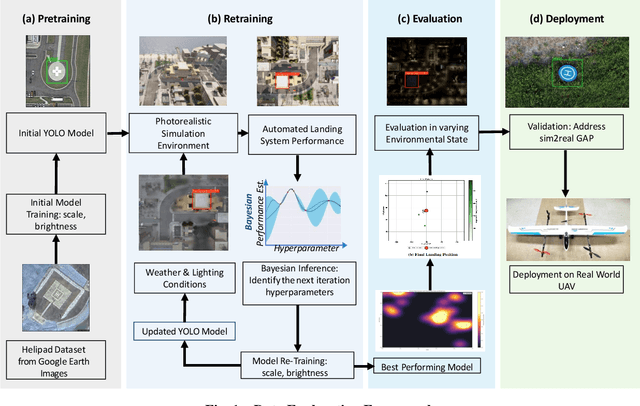
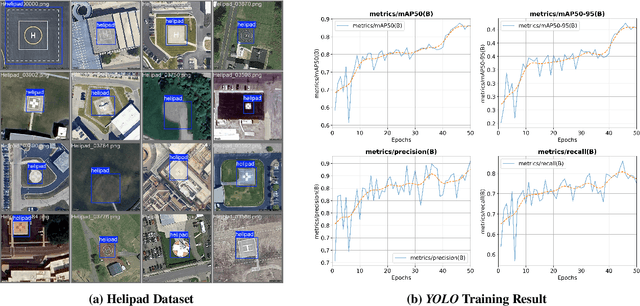
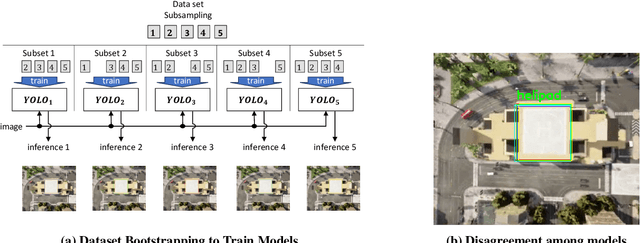
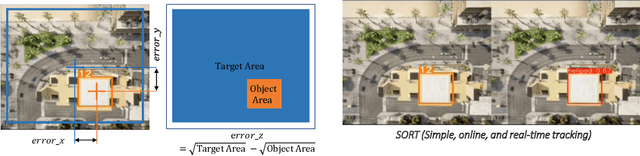
Learning-based solutions have enabled incredible capabilities for autonomous systems. Autonomous vehicles, both aerial and ground, rely on DNN for various integral tasks, including perception. The efficacy of supervised learning solutions hinges on the quality of the training data. Discrepancies between training data and operating conditions result in faults that can lead to catastrophic incidents. However, collecting vast amounts of context-sensitive data, with broad coverage of possible operating environments, is prohibitively difficult. Synthetic data generation techniques for DNN allow for the easy exploration of diverse scenarios. However, synthetic data generation solutions for aerial vehicles are still lacking. This work presents a data augmentation framework for aerial vehicle's perception training, leveraging photorealistic simulation integrated with high-fidelity vehicle dynamics. Safe landing is a crucial challenge in the development of autonomous air taxis, therefore, landing maneuver is chosen as the focus of this work. With repeated simulations of landing in varying scenarios we assess the landing performance of the VTOL type UAV and gather valuable data. The landing performance is used as the objective function to optimize the DNN through retraining. Given the high computational cost of DNN retraining, we incorporated Bayesian Optimization in our framework that systematically explores the data augmentation parameter space to retrain the best-performing models. The framework allowed us to identify high-performing data augmentation parameters that are consistently effective across different landing scenarios. Utilizing the capabilities of this data augmentation framework, we obtained a robust perception model. The model consistently improved the perception-based landing success rate by at least 20% under different lighting and weather conditions.
Synergistic Perception and Control Simplex for Verifiable Safe Vertical Landing
Dec 05, 2023



Perception, Planning, and Control form the essential components of autonomy in advanced air mobility. This work advances the holistic integration of these components to enhance the performance and robustness of the complete cyber-physical system. We adapt Perception Simplex, a system for verifiable collision avoidance amidst obstacle detection faults, to the vertical landing maneuver for autonomous air mobility vehicles. We improve upon this system by replacing static assumptions of control capabilities with dynamic confirmation, i.e., real-time confirmation of control limitations of the system, ensuring reliable fulfillment of safety maneuvers and overrides, without dependence on overly pessimistic assumptions. Parameters defining control system capabilities and limitations, e.g., maximum deceleration, are continuously tracked within the system and used to make safety-critical decisions. We apply these techniques to propose a verifiable collision avoidance solution for autonomous aerial mobility vehicles operating in cluttered and potentially unsafe environments.
Synergistic Redundancy: Towards Verifiable Safety for Autonomous Vehicles
Sep 04, 2022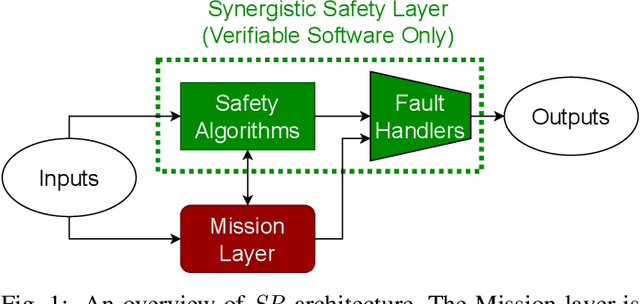
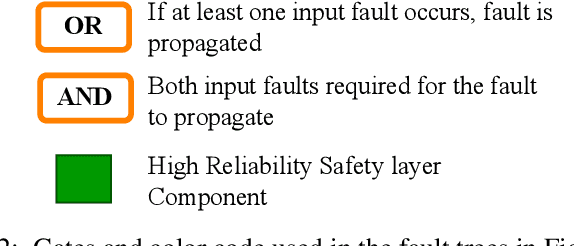
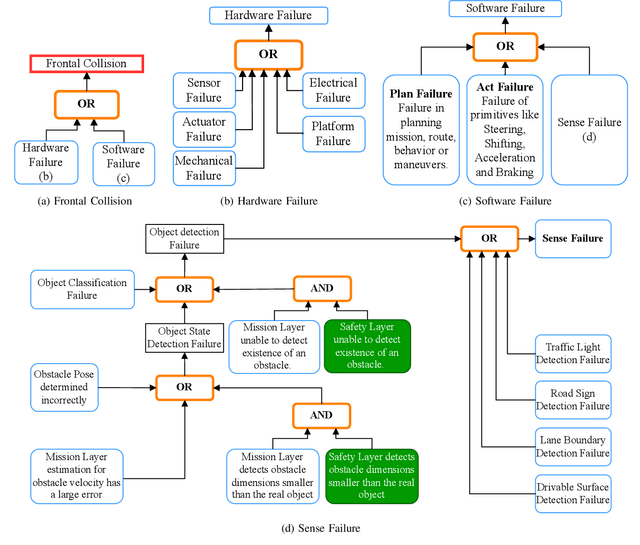
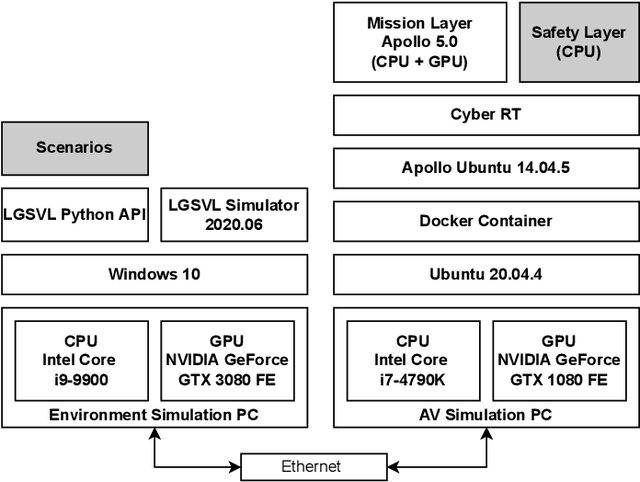
As Autonomous Vehicle (AV) development has progressed, concerns regarding the safety of passengers and agents in their environment have risen. Each real world traffic collision involving autonomously controlled vehicles has compounded this concern. Open source autonomous driving implementations show a software architecture with complex interdependent tasks, heavily reliant on machine learning and Deep Neural Networks (DNN), which are vulnerable to non deterministic faults and corner cases. These complex subsystems work together to fulfill the mission of the AV while also maintaining safety. Although significant improvements are being made towards increasing the empirical reliability and confidence in these systems, the inherent limitations of DNN verification create an, as yet, insurmountable challenge in providing deterministic safety guarantees in AV. We propose Synergistic Redundancy (SR), a safety architecture for complex cyber physical systems, like AV. SR provides verifiable safety guarantees against specific faults by decoupling the mission and safety tasks of the system. Simultaneous to independently fulfilling their primary roles, the partially functionally redundant mission and safety tasks are able to aid each other, synergistically improving the combined system. The synergistic safety layer uses only verifiable and logically analyzable software to fulfill its tasks. Close coordination with the mission layer allows easier and early detection of safety critical faults in the system. SR simplifies the mission layer's optimization goals and improves its design. SR provides safe deployment of high performance, although inherently unverifiable, machine learning software. In this work, we first present the design and features of the SR architecture and then evaluate the efficacy of the solution, focusing on the crucial problem of obstacle existence detection faults in AV.
Verifiable Obstacle Detection
Aug 30, 2022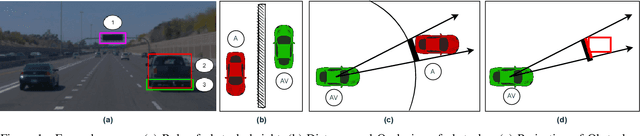
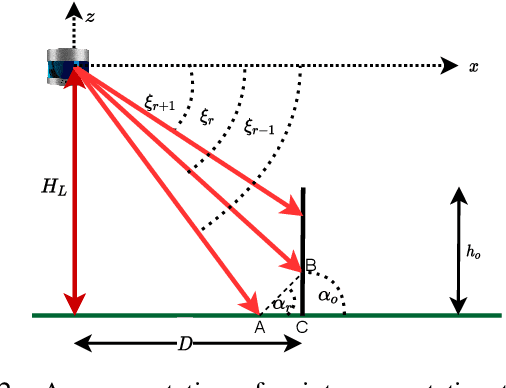
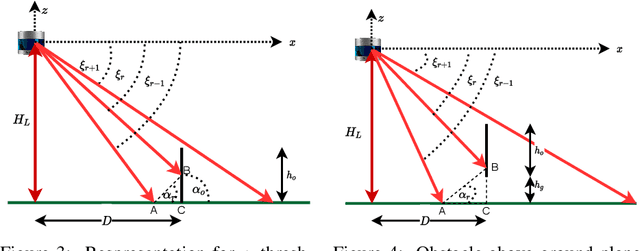
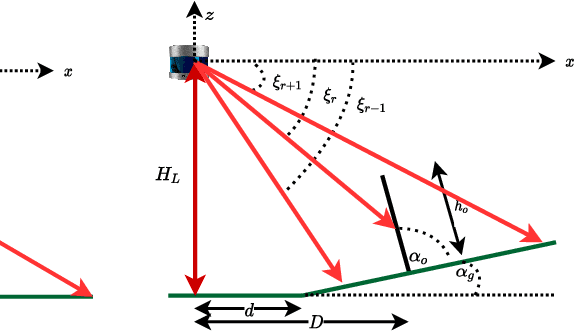
Perception of obstacles remains a critical safety concern for autonomous vehicles. Real-world collisions have shown that the autonomy faults leading to fatal collisions originate from obstacle existence detection. Open source autonomous driving implementations show a perception pipeline with complex interdependent Deep Neural Networks. These networks are not fully verifiable, making them unsuitable for safety-critical tasks. In this work, we present a safety verification of an existing LiDAR based classical obstacle detection algorithm. We establish strict bounds on the capabilities of this obstacle detection algorithm. Given safety standards, such bounds allow for determining LiDAR sensor properties that would reliably satisfy the standards. Such analysis has as yet been unattainable for neural network based perception systems. We provide a rigorous analysis of the obstacle detection system with empirical results based on real-world sensor data.
LiDAR Cluster First and Camera Inference Later: A New Perspective Towards Autonomous Driving
Nov 19, 2021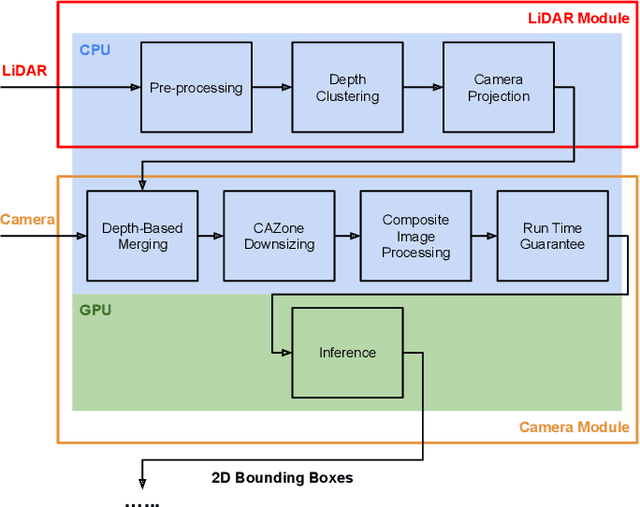
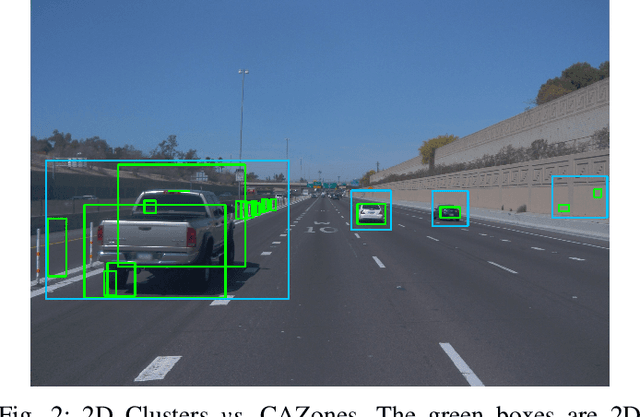
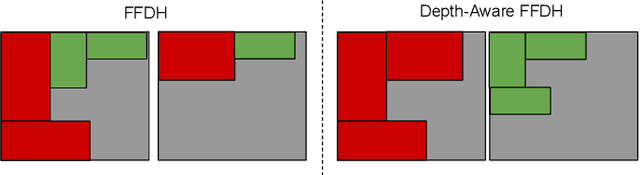

Object detection in state-of-the-art Autonomous Vehicles (AV) framework relies heavily on deep neural networks. Typically, these networks perform object detection uniformly on the entire camera LiDAR frames. However, this uniformity jeopardizes the safety of the AV by giving the same priority to all objects in the scenes regardless of their risk of collision to the AV. In this paper, we present a new end-to-end pipeline for AV that introduces the concept of LiDAR cluster first and camera inference later to detect and classify objects. The benefits of our proposed framework are twofold. First, our pipeline prioritizes detecting objects that pose a higher risk of collision to the AV, giving more time for the AV to react to unsafe conditions. Second, it also provides, on average, faster inference speeds compared to popular deep neural network pipelines. We design our framework using the real-world datasets, the Waymo Open Dataset, solving challenges arising from the limitations of LiDAR sensors and object detection algorithms. We show that our novel object detection pipeline prioritizes the detection of higher risk objects while simultaneously achieving comparable accuracy and a 25% higher average speed compared to camera inference only.
Risk Ranked Recall: Collision Safety Metric for Object Detection Systems in Autonomous Vehicles
Jun 08, 2021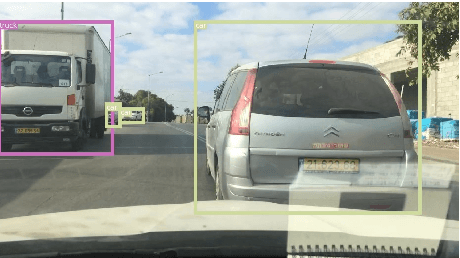
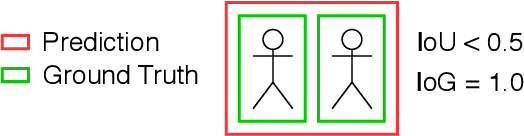
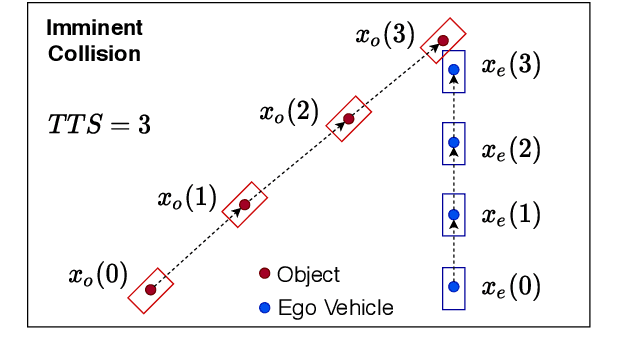

Commonly used metrics for evaluation of object detection systems (precision, recall, mAP) do not give complete information about their suitability of use in safety critical tasks, like obstacle detection for collision avoidance in Autonomous Vehicles (AV). This work introduces the Risk Ranked Recall ($R^3$) metrics for object detection systems. The $R^3$ metrics categorize objects within three ranks. Ranks are assigned based on an objective cyber-physical model for the risk of collision. Recall is measured for each rank.