 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Localization of Unstable Systems with Coarse Information
Feb 05, 2026We study localization and control for unstable systems under coarse, single-bit sensing. Motivated by understanding the fundamental limitations imposed by such minimal feedback, we identify sufficient conditions under which the initial state can be recovered despite instability and extremely sparse measurements. Building on these conditions, we develop an active localization algorithm that integrates a set-based estimator with a control strategy derived from Voronoi partitions, which provably estimates the initial state while ensuring the agent remains in informative regions. Under the derived conditions, the proposed approach guarantees exponential contraction of the initial-state uncertainty, and the result is further supported by numerical experiments. These findings can offer theoretical insight into localization in robotics, where sensing is often limited to coarse abstractions such as keyframes, segmentations, or line-based features.
Performance-Guided Refinement for Visual Aerial Navigation using Editable Gaussian Splatting in FalconGym 2.0
Oct 02, 2025Visual policy design is crucial for aerial navigation. However, state-of-the-art visual policies often overfit to a single track and their performance degrades when track geometry changes. We develop FalconGym 2.0, a photorealistic simulation framework built on Gaussian Splatting (GSplat) with an Edit API that programmatically generates diverse static and dynamic tracks in milliseconds. Leveraging FalconGym 2.0's editability, we propose a Performance-Guided Refinement (PGR) algorithm, which concentrates visual policy's training on challenging tracks while iteratively improving its performance. Across two case studies (fixed-wing UAVs and quadrotors) with distinct dynamics and environments, we show that a single visual policy trained with PGR in FalconGym 2.0 outperforms state-of-the-art baselines in generalization and robustness: it generalizes to three unseen tracks with 100% success without per-track retraining and maintains higher success rates under gate-pose perturbations. Finally, we demonstrate that the visual policy trained with PGR in FalconGym 2.0 can be zero-shot sim-to-real transferred to a quadrotor hardware, achieving a 98.6% success rate (69 / 70 gates) over 30 trials spanning two three-gate tracks and a moving-gate track.
Towards Unified Probabilistic Verification and Validation of Vision-Based Autonomy
Aug 19, 2025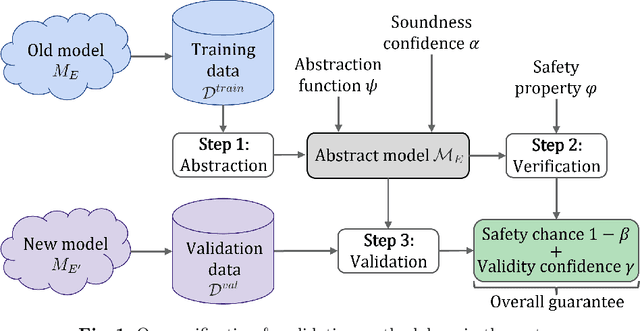
Precise and comprehensive situational awareness is a critical capability of modern autonomous systems. Deep neural networks that perceive task-critical details from rich sensory signals have become ubiquitous; however, their black-box behavior and sensitivity to environmental uncertainty and distribution shifts make them challenging to verify formally. Abstraction-based verification techniques for vision-based autonomy produce safety guarantees contingent on rigid assumptions, such as bounded errors or known unique distributions. Such overly restrictive and inflexible assumptions limit the validity of the guarantees, especially in diverse and uncertain test-time environments. We propose a methodology that unifies the verification models of perception with their offline validation. Our methodology leverages interval MDPs and provides a flexible end-to-end guarantee that adapts directly to the out-of-distribution test-time conditions. We evaluate our methodology on a synthetic perception Markov chain with well-defined state estimation distributions and a mountain car benchmark. Our findings reveal that we can guarantee tight yet rigorous bounds on overall system safety.
FalconWing: An Open-Source Platform for Ultra-Light Fixed-Wing Aircraft Research
May 02, 2025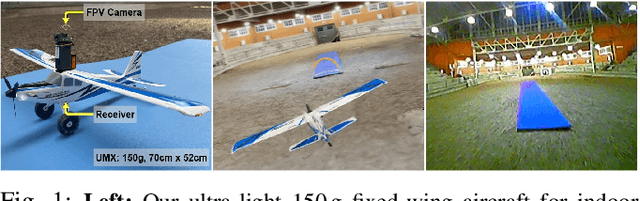
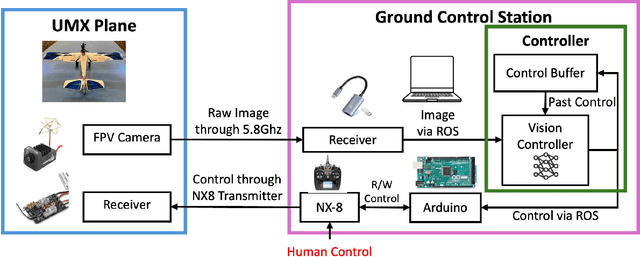
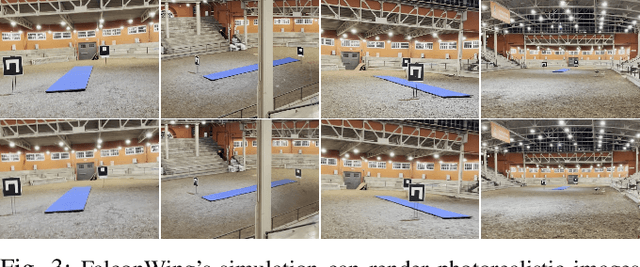

We present FalconWing -- an open-source, ultra-lightweight (150 g) fixed-wing platform for autonomy research. The hardware platform integrates a small camera, a standard airframe, offboard computation, and radio communication for manual overrides. We demonstrate FalconWing's capabilities by developing and deploying a purely vision-based control policy for autonomous landing (without IMU or motion capture) using a novel real-to-sim-to-real learning approach. Our learning approach: (1) constructs a photorealistic simulation environment via 3D Gaussian splatting trained on real-world images; (2) identifies nonlinear dynamics from vision-estimated real-flight data; and (3) trains a multi-modal Vision Transformer (ViT) policy through simulation-only imitation learning. The ViT architecture fuses single RGB image with the history of control actions via self-attention, preserving temporal context while maintaining real-time 20 Hz inference. When deployed zero-shot on the hardware platform, this policy achieves an 80% success rate in vision-based autonomous landings. Together with the hardware specifications, we also open-source the system dynamics, the software for photorealistic simulator and the learning approach.
Zero-Shot Sim-to-Real Visual Quadrotor Control with Hard Constraints
Mar 04, 2025



We present the first framework demonstrating zero-shot sim-to-real transfer of visual control policies learned in a Neural Radiance Field (NeRF) environment for quadrotors to fly through racing gates. Robust transfer from simulation to real flight poses a major challenge, as standard simulators often lack sufficient visual fidelity. To address this, we construct a photorealistic simulation environment of quadrotor racing tracks, called FalconGym, which provides effectively unlimited synthetic images for training. Within FalconGym, we develop a pipelined approach for crossing gates that combines (i) a Neural Pose Estimator (NPE) coupled with a Kalman filter to reliably infer quadrotor poses from single-frame RGB images and IMU data, and (ii) a self-attention-based multi-modal controller that adaptively integrates visual features and pose estimation. This multi-modal design compensates for perception noise and intermittent gate visibility. We train this controller purely in FalconGym with imitation learning and deploy the resulting policy to real hardware with no additional fine-tuning. Simulation experiments on three distinct tracks (circle, U-turn and figure-8) demonstrate that our controller outperforms a vision-only state-of-the-art baseline in both success rate and gate-crossing accuracy. In 30 live hardware flights spanning three tracks and 120 gates, our controller achieves a 95.8% success rate and an average error of just 10 cm when flying through 38 cm-radius gates.
Verification and Validation of a Vision-Based Landing System for Autonomous VTOL Air Taxis
Dec 11, 2024
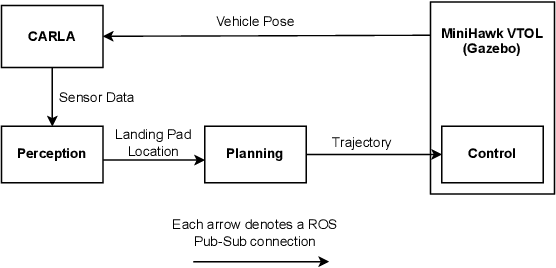
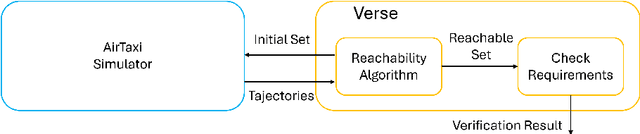
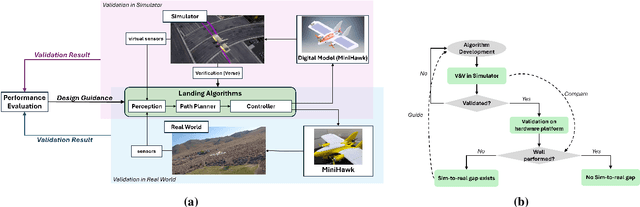
Autonomous air taxis are poised to revolutionize urban mass transportation, however, ensuring their safety and reliability remains an open challenge. Validating autonomy solutions on air taxis in the real world presents complexities, risks, and costs that further convolute this challenge. Verification and Validation (V&V) frameworks play a crucial role in the design and development of highly reliable systems by formally verifying safety properties and validating algorithm behavior across diverse operational scenarios. Advancements in high-fidelity simulators have significantly enhanced their capability to emulate real-world conditions, encouraging their use for validating autonomous air taxi solutions, especially during early development stages. This evolution underscores the growing importance of simulation environments, not only as complementary tools to real-world testing but as essential platforms for evaluating algorithms in a controlled, reproducible, and scalable manner. This work presents a V&V framework for a vision-based landing system for air taxis with vertical take-off and landing (VTOL) capabilities. Specifically, we use Verse, a tool for formal verification, to model and verify the safety of the system by obtaining and analyzing the reachable sets. To conduct this analysis, we utilize a photorealistic simulation environment. The simulation environment, built on Unreal Engine, provides realistic terrain, weather, and sensor characteristics to emulate real-world conditions with high fidelity. To validate the safety analysis results, we conduct extensive scenario-based testing to assess the reachability set and robustness of the landing algorithm in various conditions. This approach showcases the representativeness of high-fidelity simulators, offering an effective means to analyze and refine algorithms before real-world deployment.
From Dashcam Videos to Driving Simulations: Stress Testing Automated Vehicles against Rare Events
Nov 25, 2024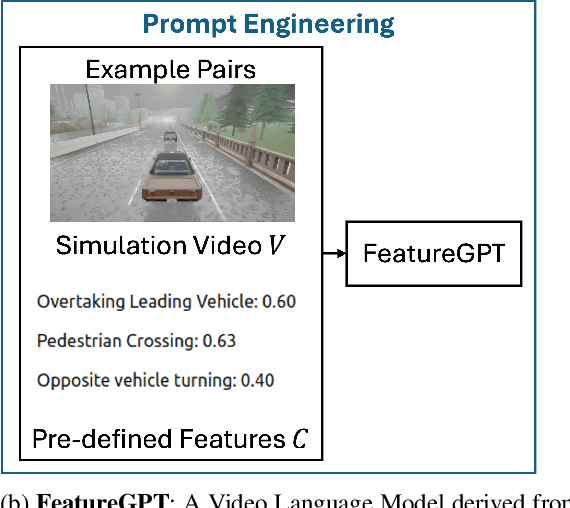
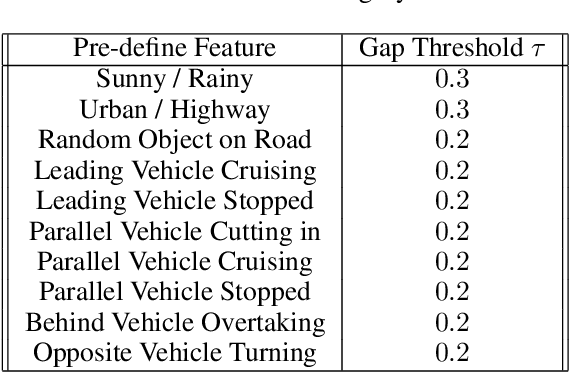

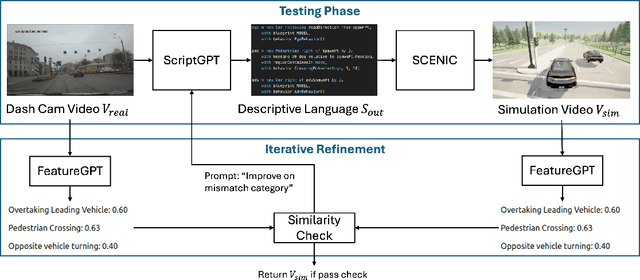
Testing Automated Driving Systems (ADS) in simulation with realistic driving scenarios is important for verifying their performance. However, converting real-world driving videos into simulation scenarios is a significant challenge due to the complexity of interpreting high-dimensional video data and the time-consuming nature of precise manual scenario reconstruction. In this work, we propose a novel framework that automates the conversion of real-world car crash videos into detailed simulation scenarios for ADS testing. Our approach leverages prompt-engineered Video Language Models(VLM) to transform dashcam footage into SCENIC scripts, which define the environment and driving behaviors in the CARLA simulator, enabling the generation of realistic simulation scenarios. Importantly, rather than solely aiming for one-to-one scenario reconstruction, our framework focuses on capturing the essential driving behaviors from the original video while offering flexibility in parameters such as weather or road conditions to facilitate search-based testing. Additionally, we introduce a similarity metric that helps iteratively refine the generated scenario through feedback by comparing key features of driving behaviors between the real and simulated videos. Our preliminary results demonstrate substantial time efficiency, finishing the real-to-sim conversion in minutes with full automation and no human intervention, while maintaining high fidelity to the original driving events.
Visual Tracking with Intermittent Visibility: Switched Control Design and Implementation
Nov 12, 2024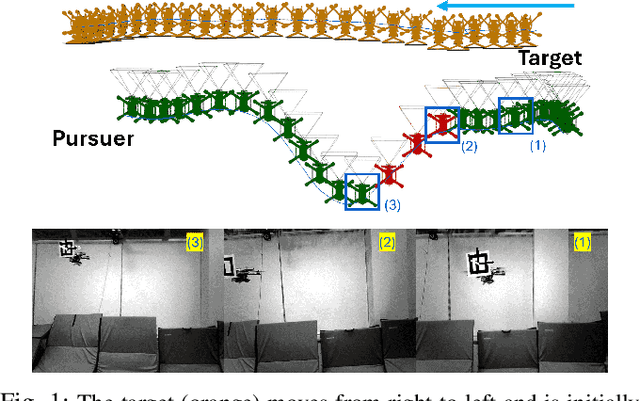
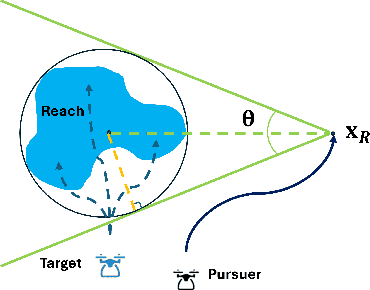
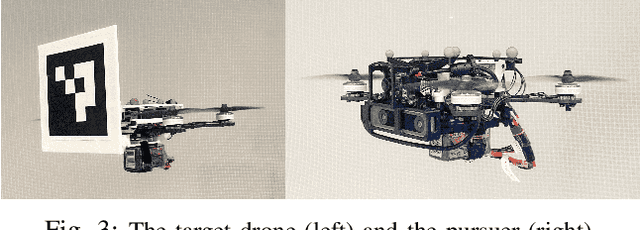
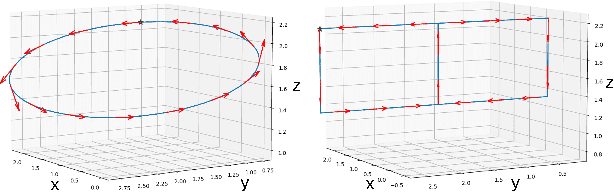
This paper addresses the problem of visual target tracking in scenarios where a pursuer may experience intermittent loss of visibility of the target. The design of a Switched Visual Tracker (SVT) is presented which aims to meet the competing requirements of maintaining both proximity and visibility. SVT alternates between a visual tracking mode for following the target, and a recovery mode for regaining visual contact when the target falls out of sight. We establish the stability of SVT by extending the average dwell time theorem from switched systems theory, which may be of independent interest. Our implementation of SVT on an Agilicious drone [1] illustrates its effectiveness on tracking various target trajectories: it reduces the average tracking error by up to 45% and significantly improves visibility duration compared to a baseline algorithm. The results show that our approach effectively handles intermittent vision loss, offering enhanced robustness and adaptability for real-world autonomous missions. Additionally, we demonstrate how the stability analysis provides valuable guidance for selecting parameters, such as tracking speed and recovery distance, to optimize the SVT's performance.
Can LLMs plan paths with extra hints from solvers?
Oct 07, 2024Large Language Models (LLMs) have shown remarkable capabilities in natural language processing, mathematical problem solving, and tasks related to program synthesis. However, their effectiveness in long-term planning and higher-order reasoning has been noted to be limited and fragile. This paper explores an approach for enhancing LLM performance in solving a classical robotic planning task by integrating solver-generated feedback. We explore four different strategies for providing feedback, including visual feedback, we utilize fine-tuning, and we evaluate the performance of three different LLMs across a 10 standard and 100 more randomly generated planning problems. Our results suggest that the solver-generated feedback improves the LLM's ability to solve the moderately difficult problems, but the harder problems still remain out of reach. The study provides detailed analysis of the effects of the different hinting strategies and the different planning tendencies of the evaluated LLMs.
Refining Perception Contracts: Case Studies in Vision-based Safe Auto-landing
Nov 15, 2023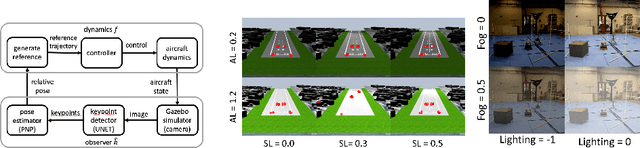
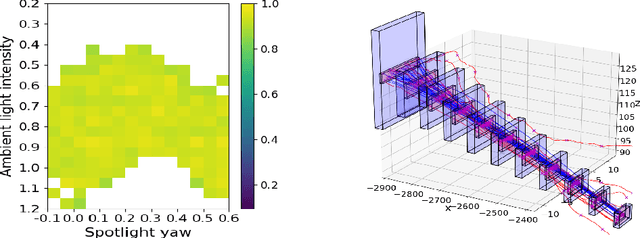
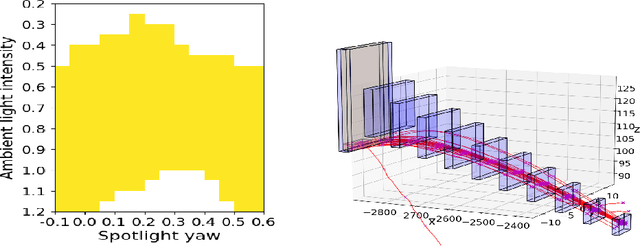
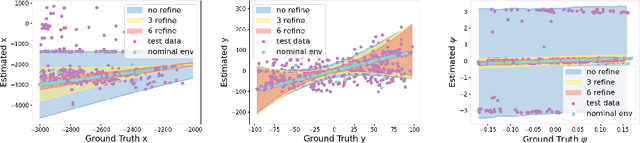
Perception contracts provide a method for evaluating safety of control systems that use machine learning for perception. A perception contract is a specification for testing the ML components, and it gives a method for proving end-to-end system-level safety requirements. The feasibility of contract-based testing and assurance was established earlier in the context of straight lane keeping: a 3-dimensional system with relatively simple dynamics. This paper presents the analysis of two 6 and 12-dimensional flight control systems that use multi-stage, heterogeneous, ML-enabled perception. The paper advances methodology by introducing an algorithm for constructing data and requirement guided refinement of perception contracts (DaRePC). The resulting analysis provides testable contracts which establish the state and environment conditions under which an aircraft can safety touchdown on the runway and a drone can safely pass through a sequence of gates. It can also discover conditions (e.g., low-horizon sun) that can possibly violate the safety of the vision-based control system.