 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTexture- and Shape-based Adversarial Attacks for Vehicle Detection in Synthetic Overhead Imagery
Dec 20, 2024Detecting vehicles in aerial images can be very challenging due to complex backgrounds, small resolution, shadows, and occlusions. Despite the effectiveness of SOTA detectors such as YOLO, they remain vulnerable to adversarial attacks (AAs), compromising their reliability. Traditional AA strategies often overlook the practical constraints of physical implementation, focusing solely on attack performance. Our work addresses this issue by proposing practical implementation constraints for AA in texture and/or shape. These constraints include pixelation, masking, limiting the color palette of the textures, and constraining the shape modifications. We evaluated the proposed constraints through extensive experiments using three widely used object detector architectures, and compared them to previous works. The results demonstrate the effectiveness of our solutions and reveal a trade-off between practicality and performance. Additionally, we introduce a labeled dataset of overhead images featuring vehicles of various categories. We will make the code/dataset public upon paper acceptance.
Verification and Validation of a Vision-Based Landing System for Autonomous VTOL Air Taxis
Dec 11, 2024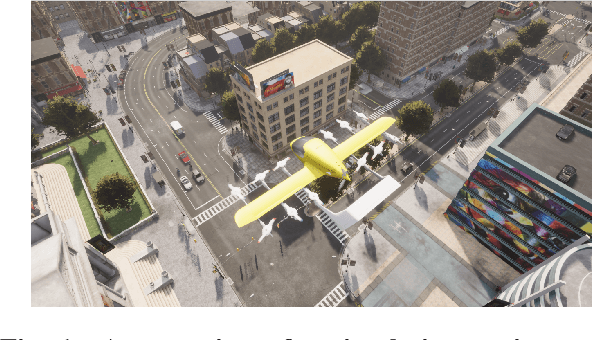
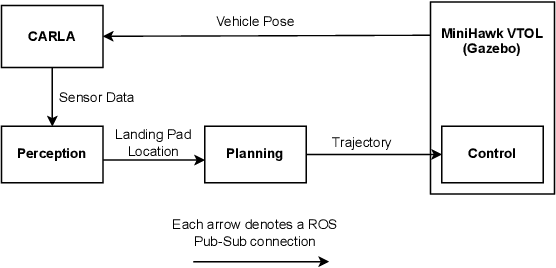
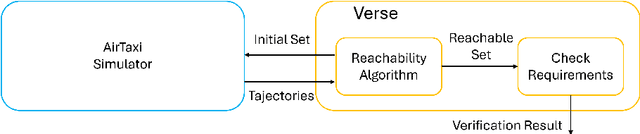
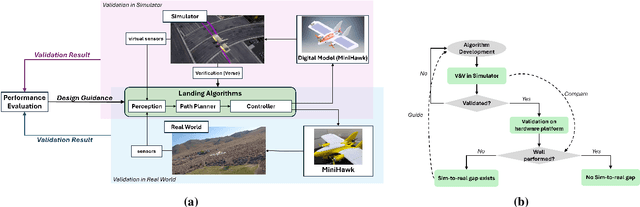
Autonomous air taxis are poised to revolutionize urban mass transportation, however, ensuring their safety and reliability remains an open challenge. Validating autonomy solutions on air taxis in the real world presents complexities, risks, and costs that further convolute this challenge. Verification and Validation (V&V) frameworks play a crucial role in the design and development of highly reliable systems by formally verifying safety properties and validating algorithm behavior across diverse operational scenarios. Advancements in high-fidelity simulators have significantly enhanced their capability to emulate real-world conditions, encouraging their use for validating autonomous air taxi solutions, especially during early development stages. This evolution underscores the growing importance of simulation environments, not only as complementary tools to real-world testing but as essential platforms for evaluating algorithms in a controlled, reproducible, and scalable manner. This work presents a V&V framework for a vision-based landing system for air taxis with vertical take-off and landing (VTOL) capabilities. Specifically, we use Verse, a tool for formal verification, to model and verify the safety of the system by obtaining and analyzing the reachable sets. To conduct this analysis, we utilize a photorealistic simulation environment. The simulation environment, built on Unreal Engine, provides realistic terrain, weather, and sensor characteristics to emulate real-world conditions with high fidelity. To validate the safety analysis results, we conduct extensive scenario-based testing to assess the reachability set and robustness of the landing algorithm in various conditions. This approach showcases the representativeness of high-fidelity simulators, offering an effective means to analyze and refine algorithms before real-world deployment.