 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTexture- and Shape-based Adversarial Attacks for Vehicle Detection in Synthetic Overhead Imagery
Dec 20, 2024



Detecting vehicles in aerial images can be very challenging due to complex backgrounds, small resolution, shadows, and occlusions. Despite the effectiveness of SOTA detectors such as YOLO, they remain vulnerable to adversarial attacks (AAs), compromising their reliability. Traditional AA strategies often overlook the practical constraints of physical implementation, focusing solely on attack performance. Our work addresses this issue by proposing practical implementation constraints for AA in texture and/or shape. These constraints include pixelation, masking, limiting the color palette of the textures, and constraining the shape modifications. We evaluated the proposed constraints through extensive experiments using three widely used object detector architectures, and compared them to previous works. The results demonstrate the effectiveness of our solutions and reveal a trade-off between practicality and performance. Additionally, we introduce a labeled dataset of overhead images featuring vehicles of various categories. We will make the code/dataset public upon paper acceptance.
Does Optimal Source Task Performance Imply Optimal Pre-training for a Target Task?
Jun 21, 2021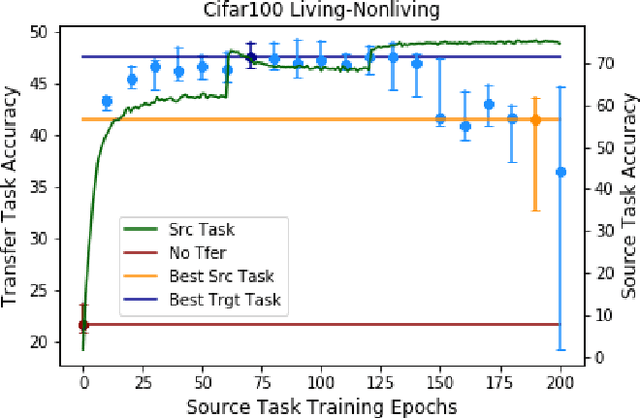
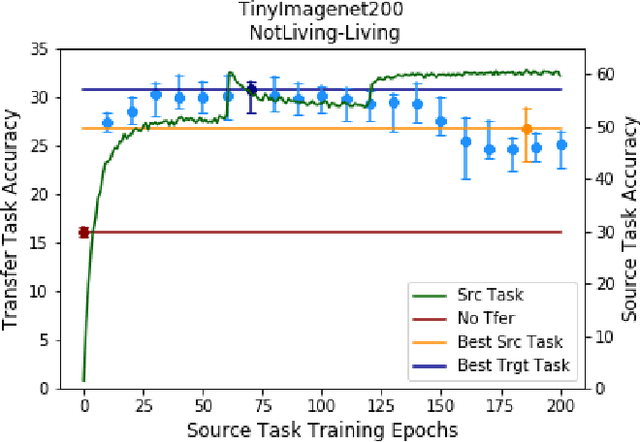
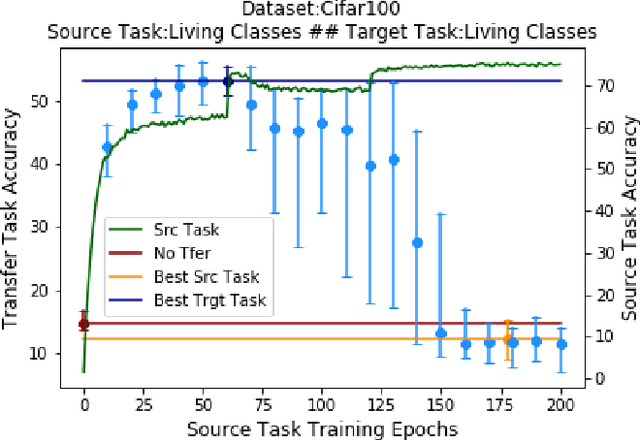
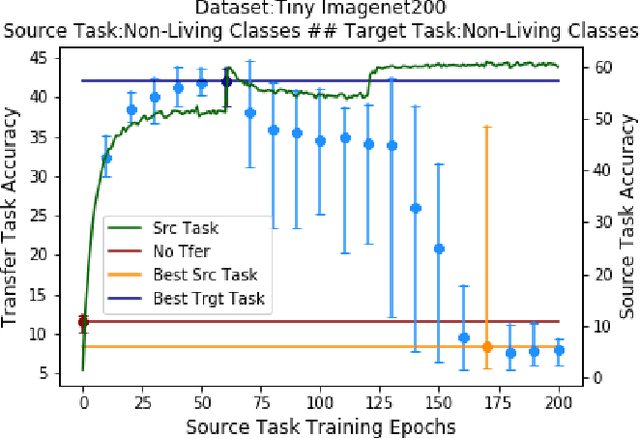
Pre-trained deep nets are commonly used to improve accuracies and training times for neural nets. It is generally assumed that pre-training a net for optimal source task performance best prepares it to learn an arbitrary target task. This is generally not true. Stopping source task training, prior to optimal performance, can create a pre-trained net better suited for learning a new task. We performed several experiments demonstrating this effect, as well as the influence of amount of training and of learning rate. Additionally, we show that this reflects a general loss of learning ability that even extends to relearning the source task