 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerification and Validation of a Vision-Based Landing System for Autonomous VTOL Air Taxis
Dec 11, 2024
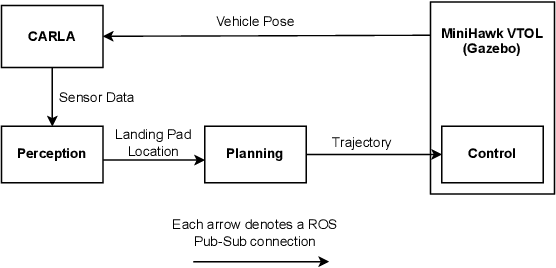
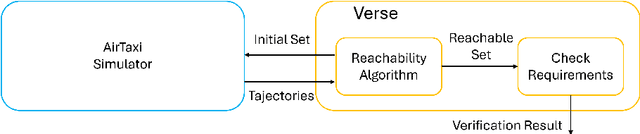
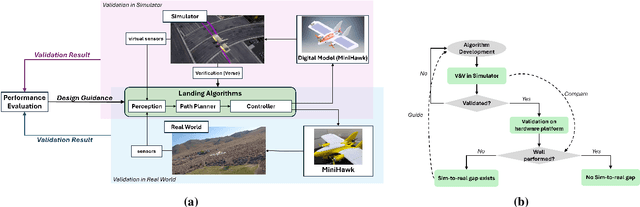
Autonomous air taxis are poised to revolutionize urban mass transportation, however, ensuring their safety and reliability remains an open challenge. Validating autonomy solutions on air taxis in the real world presents complexities, risks, and costs that further convolute this challenge. Verification and Validation (V&V) frameworks play a crucial role in the design and development of highly reliable systems by formally verifying safety properties and validating algorithm behavior across diverse operational scenarios. Advancements in high-fidelity simulators have significantly enhanced their capability to emulate real-world conditions, encouraging their use for validating autonomous air taxi solutions, especially during early development stages. This evolution underscores the growing importance of simulation environments, not only as complementary tools to real-world testing but as essential platforms for evaluating algorithms in a controlled, reproducible, and scalable manner. This work presents a V&V framework for a vision-based landing system for air taxis with vertical take-off and landing (VTOL) capabilities. Specifically, we use Verse, a tool for formal verification, to model and verify the safety of the system by obtaining and analyzing the reachable sets. To conduct this analysis, we utilize a photorealistic simulation environment. The simulation environment, built on Unreal Engine, provides realistic terrain, weather, and sensor characteristics to emulate real-world conditions with high fidelity. To validate the safety analysis results, we conduct extensive scenario-based testing to assess the reachability set and robustness of the landing algorithm in various conditions. This approach showcases the representativeness of high-fidelity simulators, offering an effective means to analyze and refine algorithms before real-world deployment.
Bayesian Data Augmentation and Training for Perception DNN in Autonomous Aerial Vehicles
Dec 10, 2024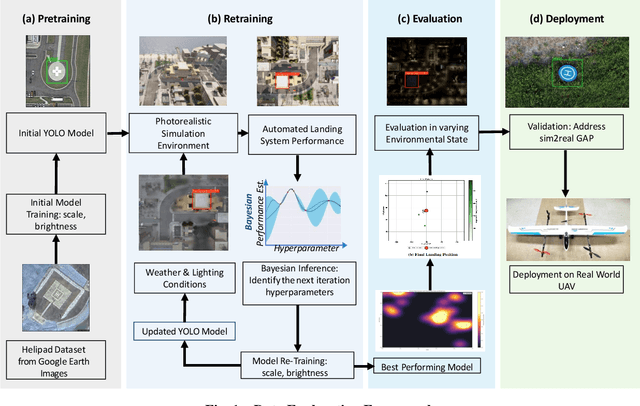
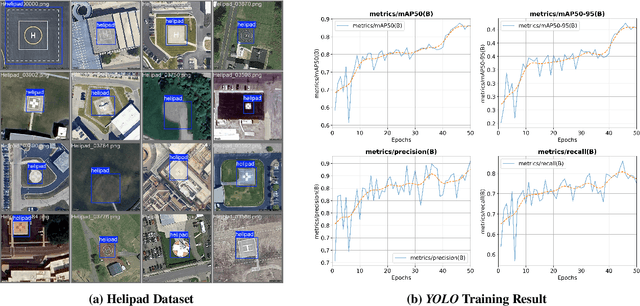
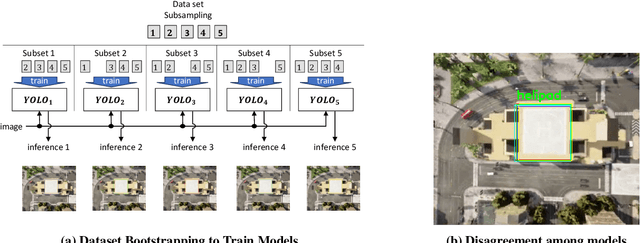
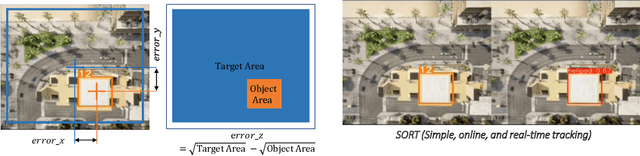
Learning-based solutions have enabled incredible capabilities for autonomous systems. Autonomous vehicles, both aerial and ground, rely on DNN for various integral tasks, including perception. The efficacy of supervised learning solutions hinges on the quality of the training data. Discrepancies between training data and operating conditions result in faults that can lead to catastrophic incidents. However, collecting vast amounts of context-sensitive data, with broad coverage of possible operating environments, is prohibitively difficult. Synthetic data generation techniques for DNN allow for the easy exploration of diverse scenarios. However, synthetic data generation solutions for aerial vehicles are still lacking. This work presents a data augmentation framework for aerial vehicle's perception training, leveraging photorealistic simulation integrated with high-fidelity vehicle dynamics. Safe landing is a crucial challenge in the development of autonomous air taxis, therefore, landing maneuver is chosen as the focus of this work. With repeated simulations of landing in varying scenarios we assess the landing performance of the VTOL type UAV and gather valuable data. The landing performance is used as the objective function to optimize the DNN through retraining. Given the high computational cost of DNN retraining, we incorporated Bayesian Optimization in our framework that systematically explores the data augmentation parameter space to retrain the best-performing models. The framework allowed us to identify high-performing data augmentation parameters that are consistently effective across different landing scenarios. Utilizing the capabilities of this data augmentation framework, we obtained a robust perception model. The model consistently improved the perception-based landing success rate by at least 20% under different lighting and weather conditions.
Learning When to Use Adaptive Adversarial Image Perturbations against Autonomous Vehicles
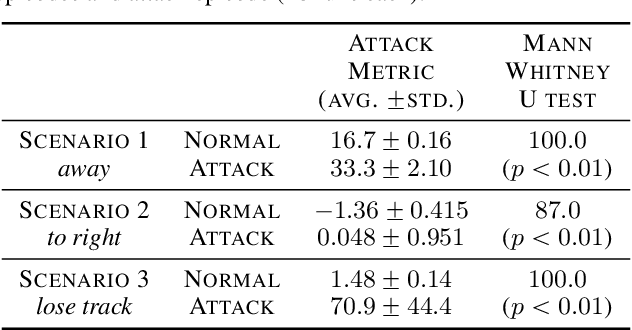
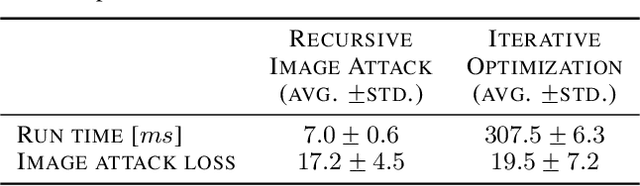
Dec 28, 2022The deep neural network (DNN) models for object detection using camera images are widely adopted in autonomous vehicles. However, DNN models are shown to be susceptible to adversarial image perturbations. In the existing methods of generating the adversarial image perturbations, optimizations take each incoming image frame as the decision variable to generate an image perturbation. Therefore, given a new image, the typically computationally-expensive optimization needs to start over as there is no learning between the independent optimizations. Very few approaches have been developed for attacking online image streams while considering the underlying physical dynamics of autonomous vehicles, their mission, and the environment. We propose a multi-level stochastic optimization framework that monitors an attacker's capability of generating the adversarial perturbations. Based on this capability level, a binary decision attack/not attack is introduced to enhance the effectiveness of the attacker. We evaluate our proposed multi-level image attack framework using simulations for vision-guided autonomous vehicles and actual tests with a small indoor drone in an office environment. The results show our method's capability to generate the image attack in real-time while monitoring when the attacker is proficient given state estimates.
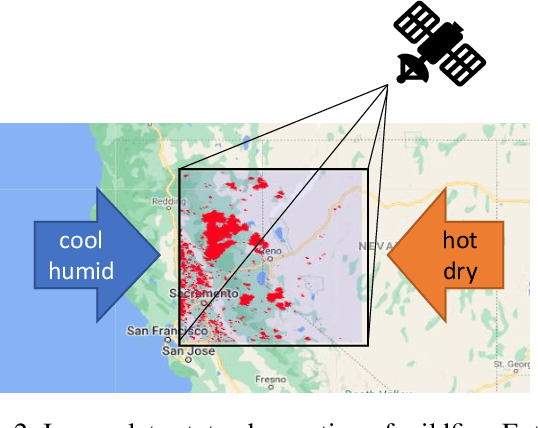
Multi-time Predictions of Wildfire Grid Map using Remote Sensing Local Data
Sep 15, 2022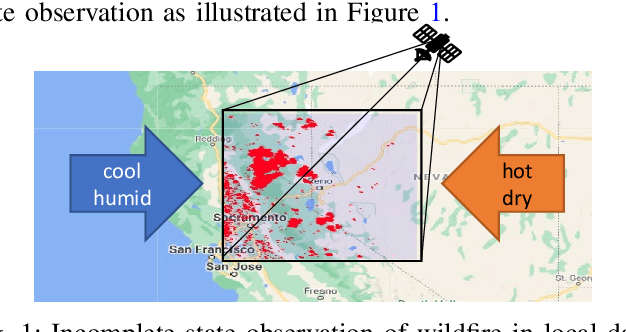
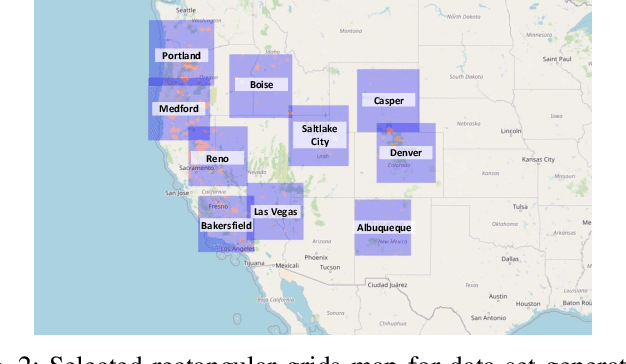
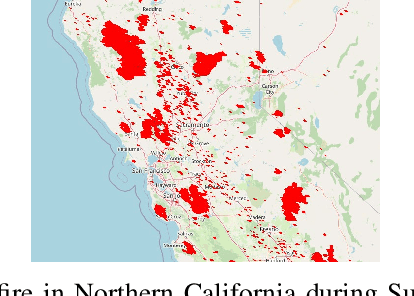

Due to recent climate changes, we have seen more frequent and severe wildfires in the United States. Predicting wildfires is critical for natural disaster prevention and mitigation. Advances in technologies in data processing and communication enabled us to access remote sensing data. With the remote sensing data, valuable spatiotemporal statistical models can be created and used for resource management practices. This paper proposes a distributed learning framework that shares local data collected in ten locations in the western USA throughout the local agents. The local agents aim to predict wildfire grid maps one, two, three, and four weeks in advance while online processing the remote sensing data stream. The proposed model has distinct features that address the characteristic need in prediction evaluations, including dynamic online estimation and time-series modeling. Local fire event triggers are not isolated between locations, and there are confounding factors when local data is analyzed due to incomplete state observations. Compared to existing approaches that do not account for incomplete state observation within wildfire time-series data, on average, we can achieve higher prediction performance.
Sampling Complexity of Path Integral Methods for Trajectory Optimization
Mar 18, 2022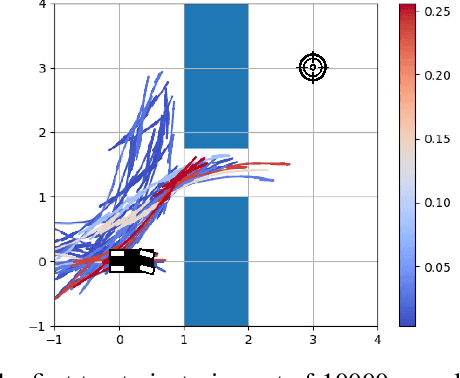
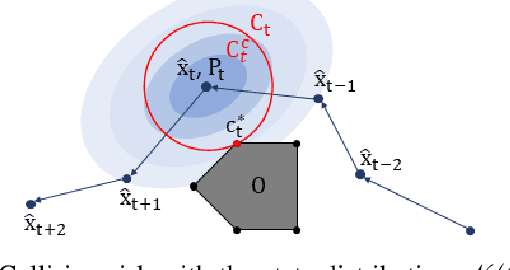
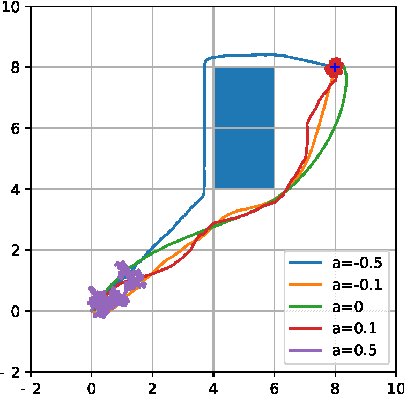
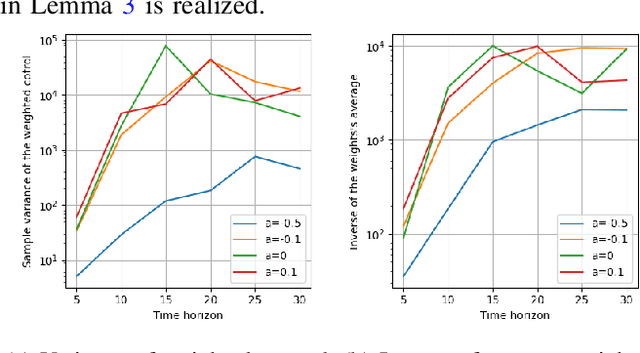
The use of random sampling in decision-making and control has become popular with the ease of access to graphic processing units that can generate and calculate multiple random trajectories for real-time robotic applications. In contrast to sequential optimization, the sampling-based method can take advantage of parallel computing to maintain constant control loop frequencies. Inspired by its wide applicability in robotic applications, we calculate a sampling complexity result applicable to general nonlinear systems considered in the path integral method, which is a sampling-based method. The result determines the required number of samples to satisfy the given error bounds of the estimated control signal from the optimal value with the predefined risk probability. The sampling complexity result shows that the variance of the estimated control value is upper-bounded in terms of the expectation of the cost. Then we apply the result to a linear time-varying dynamical system with quadratic cost and an indicator function cost to avoid constraint sets.
Learning Wildfire Model from Incomplete State Observations
Nov 28, 2021


As wildfires are expected to become more frequent and severe, improved prediction models are vital to mitigating risk and allocating resources. With remote sensing data, valuable spatiotemporal statistical models can be created and used for resource management practices. In this paper, we create a dynamic model for future wildfire predictions of five locations within the western United States through a deep neural network via historical burned area and climate data. The proposed model has distinct features that address the characteristic need in prediction evaluations, including dynamic online estimation and time-series modeling. Between locations, local fire event triggers are not isolated, and there are confounding factors when local data is analyzed due to incomplete state observations. When compared to existing approaches that do not account for incomplete state observation within wildfire time-series data, on average, we are able to achieve higher prediction performances.
Accelerated Almost-Sure Convergence Rates for Nonconvex Stochastic Gradient Descent using Stochastic Learning Rates
Nov 09, 2021

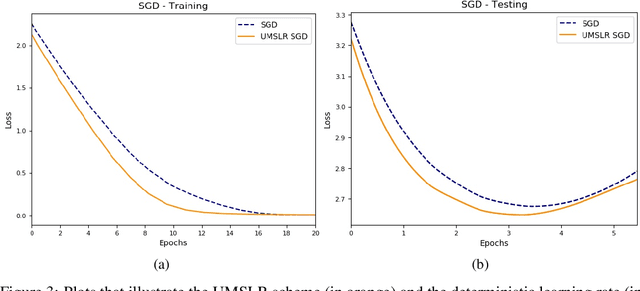
Large-scale optimization problems require algorithms both effective and efficient. One such popular and proven algorithm is Stochastic Gradient Descent which uses first-order gradient information to solve these problems. This paper studies almost-sure convergence rates of the Stochastic Gradient Descent method when instead of deterministic, its learning rate becomes stochastic. In particular, its learning rate is equipped with a multiplicative stochasticity, producing a stochastic learning rate scheme. Theoretical results show accelerated almost-sure convergence rates of Stochastic Gradient Descent in a nonconvex setting when using an appropriate stochastic learning rate, compared to a deterministic-learning-rate scheme. The theoretical results are verified empirically.
Stochastic Learning Rate Optimization in the Stochastic Approximation and Online Learning Settings
Oct 20, 2021



In this work, multiplicative stochasticity is applied to the learning rate of stochastic optimization algorithms, giving rise to stochastic learning-rate schemes. In-expectation theoretical convergence results of Stochastic Gradient Descent equipped with this novel stochastic learning rate scheme under the stochastic setting, as well as convergence results under the online optimization settings are provided. Empirical results consider the case of an adaptively uniformly distributed multiplicative stochasticity and include not only Stochastic Gradient Descent, but also other popular algorithms equipped with a stochastic learning rate. They demonstrate noticeable optimization performance gains, with respect to their deterministic-learning-rate versions.
Learning Image Attacks toward Vision Guided Autonomous Vehicles
May 17, 2021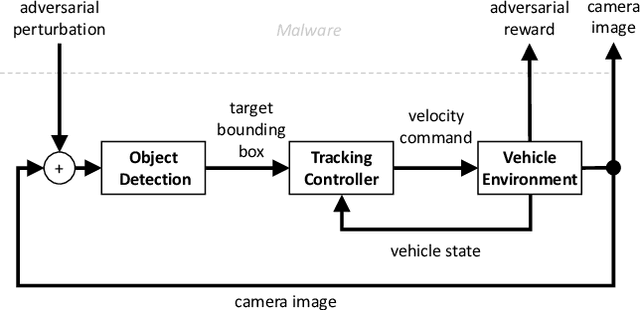
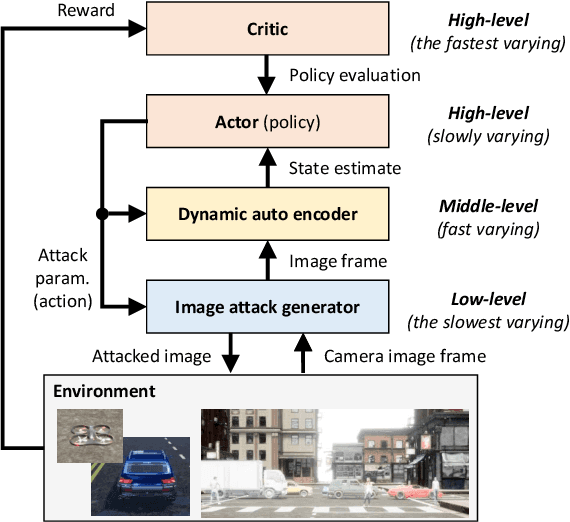
While adversarial neural networks have been shown successful for static image attacks, very few approaches have been developed for attacking online image streams while taking into account the underlying physical dynamics of autonomous vehicles, their mission, and environment. This paper presents an online adversarial machine learning framework that can effectively misguide autonomous vehicles' missions. In the existing image attack methods devised toward autonomous vehicles, optimization steps are repeated for every image frame. This framework removes the need for fully converged optimization at every frame to realize image attacks in real-time. Using reinforcement learning, a generative neural network is trained over a set of image frames to obtain an attack policy that is more robust to dynamic and uncertain environments. A state estimator is introduced for processing image streams to reduce the attack policy's sensitivity to physical variables such as unknown position and velocity. A simulation study is provided to validate the results.
Estimation and Planning of Exploration Over Grid Map Using A Spatiotemporal Model with Incomplete State Observations
Mar 04, 2021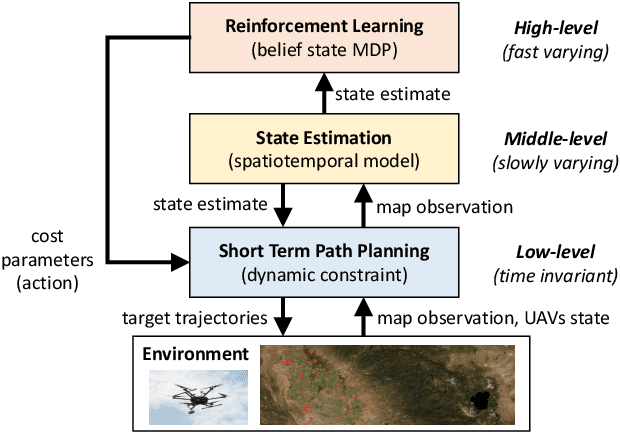
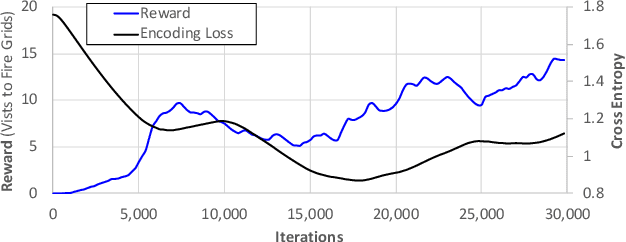
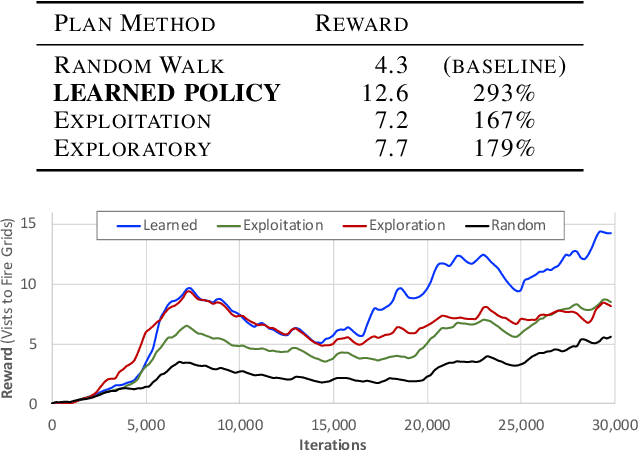
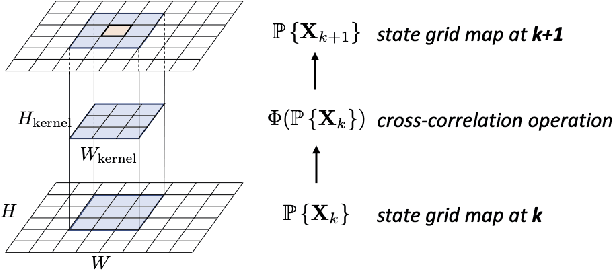
Path planning over spatiotemporal models can be applied to a variety of applications such as UAVs searching for spreading wildfire in mountains or network of balloons in time-varying atmosphere deployed for inexpensive internet service. A notable aspect in such applications is the dynamically changing environment. However, path planning algorithms often assume static environments and only consider the vehicle's dynamics exploring the environment. We present a spatiotemporal model that uses a cross-correlation operator to consider spatiotemporal dependence. Also, we present an adaptive state estimation for path planning. Since the state estimation depends on the vehicle's path, the path planning needs to consider the trade-off between exploration and exploitation. We use a high-level decision-maker to choose an explorative path or an exploitative path. The overall proposed framework consists of an adaptive state estimator, a short-term path planner, and a high-level decision-maker. We tested the framework with a spatiotemporal model simulation where the state of each grid transits from normal, latent, and fire state. For the mission objective of visiting the grids with fire, the proposed framework outperformed the random walk (baseline) and the single-minded exploitation (or exploration) path.