 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAddressing Behavior Model Inaccuracies for Safe Motion Control in Uncertain Dynamic Environments
Jul 26, 2024



Uncertainties in the environment and behavior model inaccuracies compromise the state estimation of a dynamic obstacle and its trajectory predictions, introducing biases in estimation and shifts in predictive distributions. Addressing these challenges is crucial to safely control an autonomous system. In this paper, we propose a novel algorithm SIED-MPC, which synergistically integrates Simultaneous State and Input Estimation (SSIE) and Distributionally Robust Model Predictive Control (DR-MPC) using model confidence evaluation. The SSIE process produces unbiased state estimates and optimal input gap estimates to assess the confidence of the behavior model, defining the ambiguity radius for DR-MPC to handle predictive distribution shifts. This systematic confidence evaluation leads to producing safe inputs with an adequate level of conservatism. Our algorithm demonstrated a reduced collision rate in autonomous driving simulations through improved state estimation, with a 54% shorter average computation time.
Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Jun 28, 2024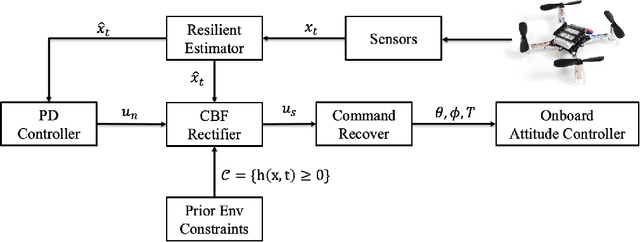


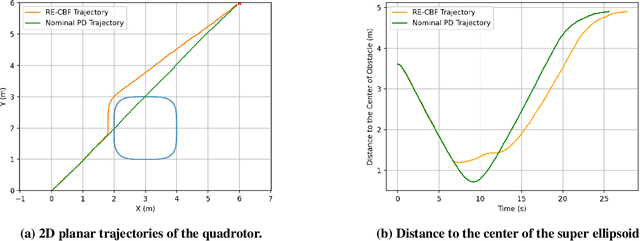
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.
Synergistic Perception and Control Simplex for Verifiable Safe Vertical Landing
Dec 05, 2023



Perception, Planning, and Control form the essential components of autonomy in advanced air mobility. This work advances the holistic integration of these components to enhance the performance and robustness of the complete cyber-physical system. We adapt Perception Simplex, a system for verifiable collision avoidance amidst obstacle detection faults, to the vertical landing maneuver for autonomous air mobility vehicles. We improve upon this system by replacing static assumptions of control capabilities with dynamic confirmation, i.e., real-time confirmation of control limitations of the system, ensuring reliable fulfillment of safety maneuvers and overrides, without dependence on overly pessimistic assumptions. Parameters defining control system capabilities and limitations, e.g., maximum deceleration, are continuously tracked within the system and used to make safety-critical decisions. We apply these techniques to propose a verifiable collision avoidance solution for autonomous aerial mobility vehicles operating in cluttered and potentially unsafe environments.
Certified Robust Control under Adversarial Perturbations
Feb 04, 2023Autonomous systems increasingly rely on machine learning techniques to transform high-dimensional raw inputs into predictions that are then used for decision-making and control. However, it is often easy to maliciously manipulate such inputs and, as a result, predictions. While effective techniques have been proposed to certify the robustness of predictions to adversarial input perturbations, such techniques have been disembodied from control systems that make downstream use of the predictions. We propose the first approach for composing robustness certification of predictions with respect to raw input perturbations with robust control to obtain certified robustness of control to adversarial input perturbations. We use a case study of adaptive vehicle control to illustrate our approach and show the value of the resulting end-to-end certificates through extensive experiments.
RRT Guided Model Predictive Path Integral Method
Jan 30, 2023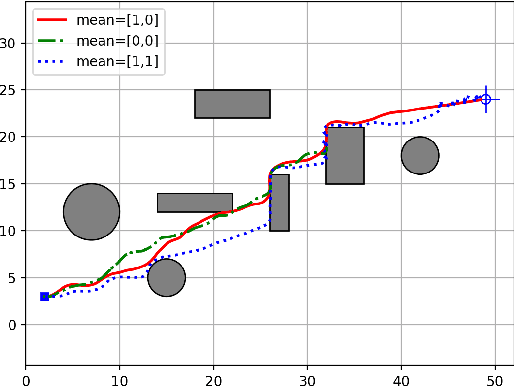



This work presents an optimal sampling-based method to solve the real-time motion planning problem in static and dynamic environments, exploiting the Rapid-exploring Random Trees (RRT) algorithm and the Model Predictive Path Integral (MPPI) algorithm. The RRT algorithm provides a nominal mean value of the random control distribution in the MPPI algorithm, resulting in satisfactory control performance in static and dynamic environments without a need for fine parameter tuning. We also discuss the importance of choosing the right mean of the MPPI algorithm, which balances exploration and optimality gap, given a fixed sample size. In particular, a sufficiently large mean is required to explore the state space enough, and a sufficiently small mean is required to guarantee that the samples reconstruct the optimal controls. The proposed methodology automates the procedure of choosing the right mean by incorporating the RRT algorithm. The simulations demonstrate that the proposed algorithm can solve the motion planning problem in real-time for static or dynamic environments.
Synergistic Redundancy: Towards Verifiable Safety for Autonomous Vehicles
Sep 04, 2022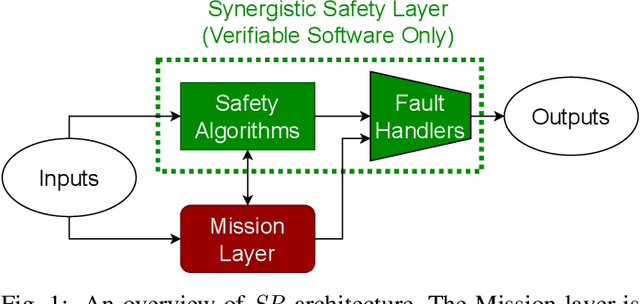
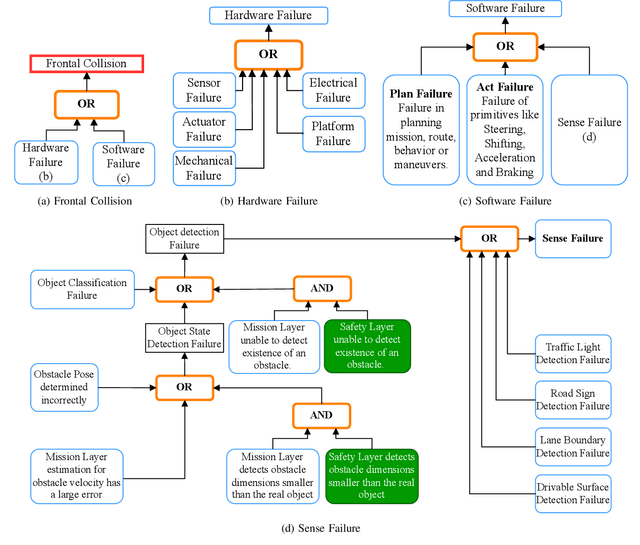
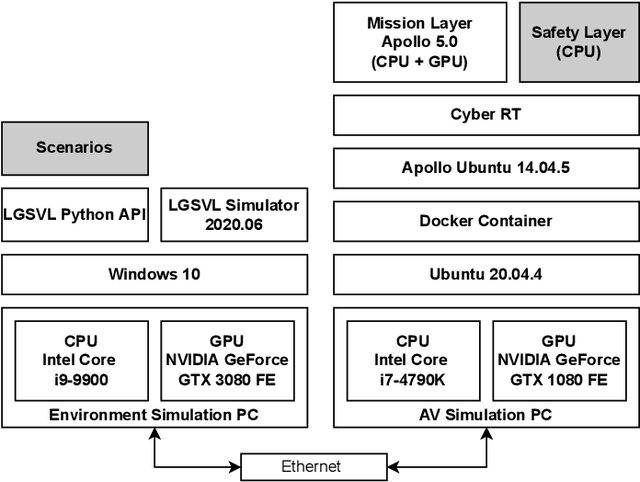
As Autonomous Vehicle (AV) development has progressed, concerns regarding the safety of passengers and agents in their environment have risen. Each real world traffic collision involving autonomously controlled vehicles has compounded this concern. Open source autonomous driving implementations show a software architecture with complex interdependent tasks, heavily reliant on machine learning and Deep Neural Networks (DNN), which are vulnerable to non deterministic faults and corner cases. These complex subsystems work together to fulfill the mission of the AV while also maintaining safety. Although significant improvements are being made towards increasing the empirical reliability and confidence in these systems, the inherent limitations of DNN verification create an, as yet, insurmountable challenge in providing deterministic safety guarantees in AV. We propose Synergistic Redundancy (SR), a safety architecture for complex cyber physical systems, like AV. SR provides verifiable safety guarantees against specific faults by decoupling the mission and safety tasks of the system. Simultaneous to independently fulfilling their primary roles, the partially functionally redundant mission and safety tasks are able to aid each other, synergistically improving the combined system. The synergistic safety layer uses only verifiable and logically analyzable software to fulfill its tasks. Close coordination with the mission layer allows easier and early detection of safety critical faults in the system. SR simplifies the mission layer's optimization goals and improves its design. SR provides safe deployment of high performance, although inherently unverifiable, machine learning software. In this work, we first present the design and features of the SR architecture and then evaluate the efficacy of the solution, focusing on the crucial problem of obstacle existence detection faults in AV.
Verifiable Obstacle Detection
Aug 30, 2022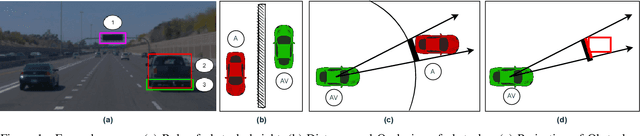
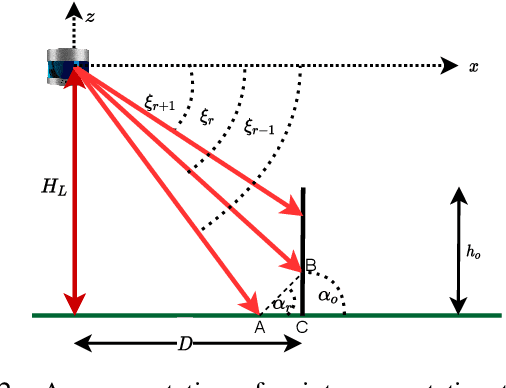
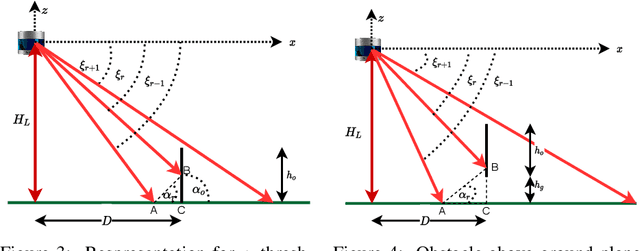
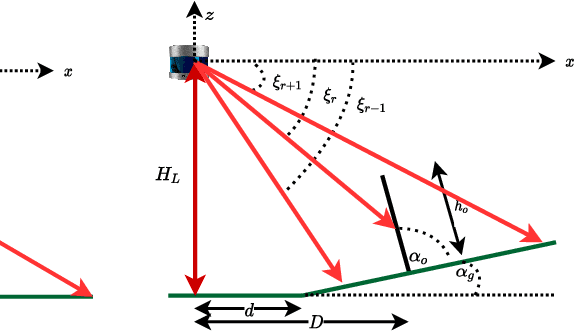
Perception of obstacles remains a critical safety concern for autonomous vehicles. Real-world collisions have shown that the autonomy faults leading to fatal collisions originate from obstacle existence detection. Open source autonomous driving implementations show a perception pipeline with complex interdependent Deep Neural Networks. These networks are not fully verifiable, making them unsuitable for safety-critical tasks. In this work, we present a safety verification of an existing LiDAR based classical obstacle detection algorithm. We establish strict bounds on the capabilities of this obstacle detection algorithm. Given safety standards, such bounds allow for determining LiDAR sensor properties that would reliably satisfy the standards. Such analysis has as yet been unattainable for neural network based perception systems. We provide a rigorous analysis of the obstacle detection system with empirical results based on real-world sensor data.
Sampling Complexity of Path Integral Methods for Trajectory Optimization
Mar 18, 2022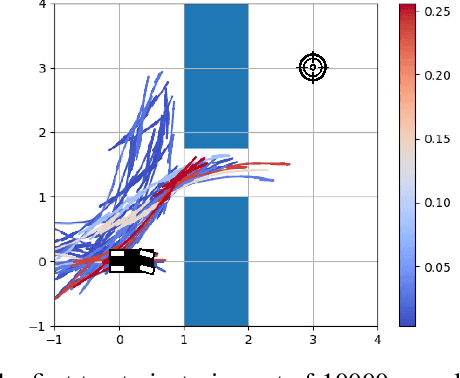
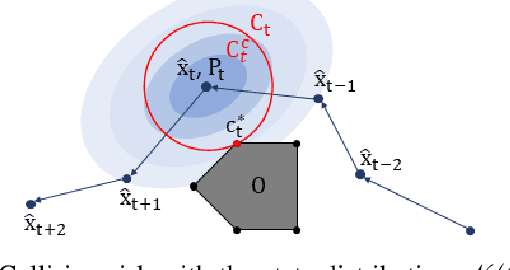
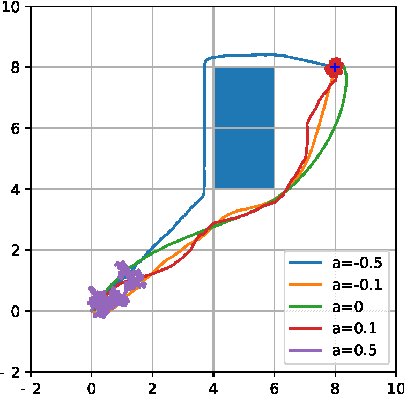
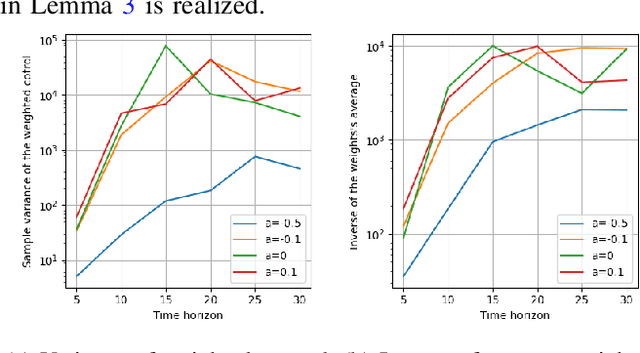
The use of random sampling in decision-making and control has become popular with the ease of access to graphic processing units that can generate and calculate multiple random trajectories for real-time robotic applications. In contrast to sequential optimization, the sampling-based method can take advantage of parallel computing to maintain constant control loop frequencies. Inspired by its wide applicability in robotic applications, we calculate a sampling complexity result applicable to general nonlinear systems considered in the path integral method, which is a sampling-based method. The result determines the required number of samples to satisfy the given error bounds of the estimated control signal from the optimal value with the predefined risk probability. The sampling complexity result shows that the variance of the estimated control value is upper-bounded in terms of the expectation of the cost. Then we apply the result to a linear time-varying dynamical system with quadratic cost and an indicator function cost to avoid constraint sets.
Estimation and Planning of Exploration Over Grid Map Using A Spatiotemporal Model with Incomplete State Observations
Mar 04, 2021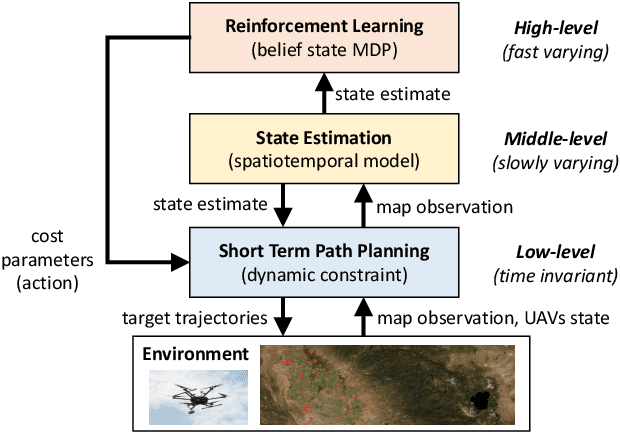
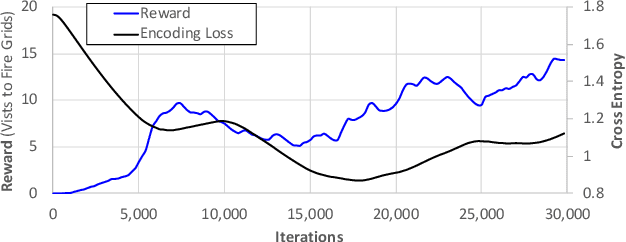
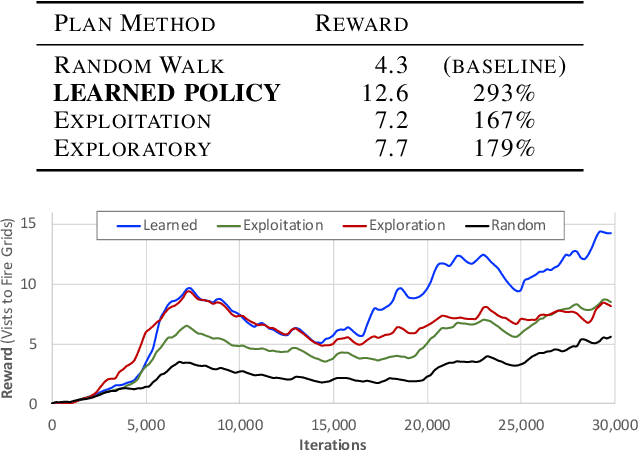
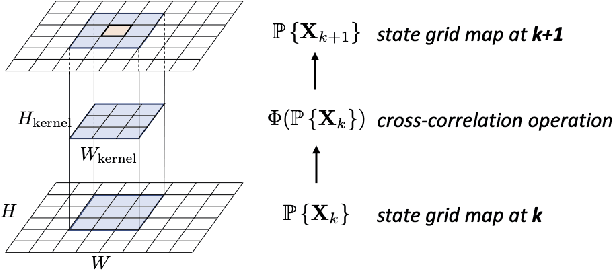
Path planning over spatiotemporal models can be applied to a variety of applications such as UAVs searching for spreading wildfire in mountains or network of balloons in time-varying atmosphere deployed for inexpensive internet service. A notable aspect in such applications is the dynamically changing environment. However, path planning algorithms often assume static environments and only consider the vehicle's dynamics exploring the environment. We present a spatiotemporal model that uses a cross-correlation operator to consider spatiotemporal dependence. Also, we present an adaptive state estimation for path planning. Since the state estimation depends on the vehicle's path, the path planning needs to consider the trade-off between exploration and exploitation. We use a high-level decision-maker to choose an explorative path or an exploitative path. The overall proposed framework consists of an adaptive state estimator, a short-term path planner, and a high-level decision-maker. We tested the framework with a spatiotemporal model simulation where the state of each grid transits from normal, latent, and fire state. For the mission objective of visiting the grids with fire, the proposed framework outperformed the random walk (baseline) and the single-minded exploitation (or exploration) path.
Towards Resilient UAV: Escape Time in GPS Denied Environment with Sensor Drift
Jun 11, 2019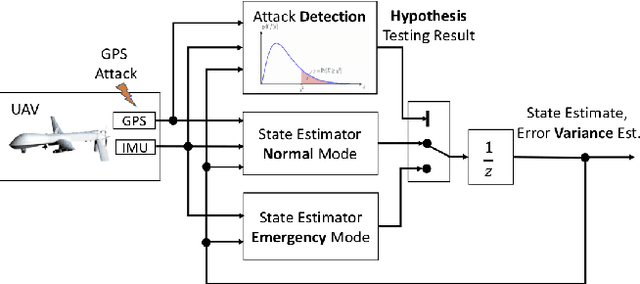
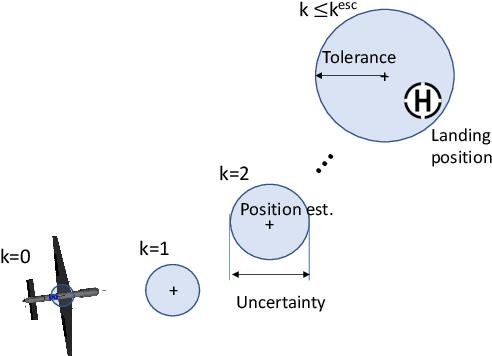
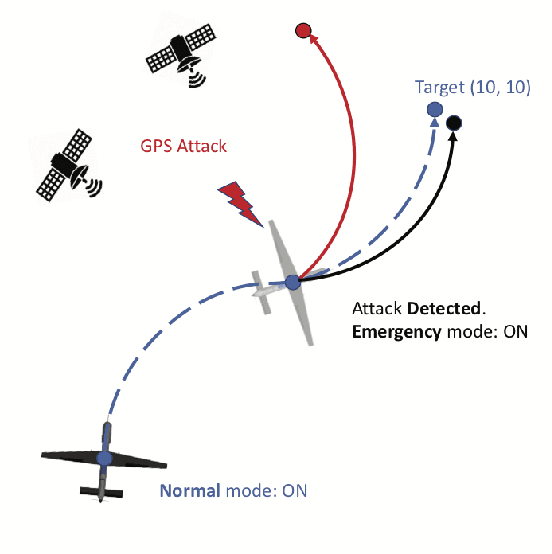
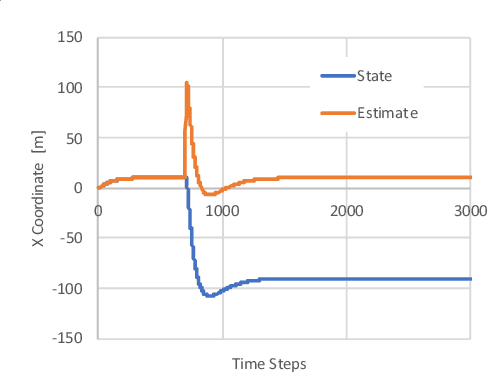
This paper considers a resilient state estimation framework for unmanned aerial vehicles (UAVs) that integrates a Kalman filter-like state estimator and an attack detector. When an attack is detected, the state estimator uses only IMU signals as the GPS signals do not contain legitimate information. This limited sensor availability induces a sensor drift problem questioning the reliability of the sensor estimates. We propose a new resilience measure, escape time, as the safe time within which the estimation errors remain in a tolerable region with high probability. This paper analyzes the stability of the proposed resilient estimation framework and quantifies a lower bound for the escape time. Moreover, simulations of the UAV model demonstrate the performance of the proposed framework and provide analytical results.