 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Jun 28, 2024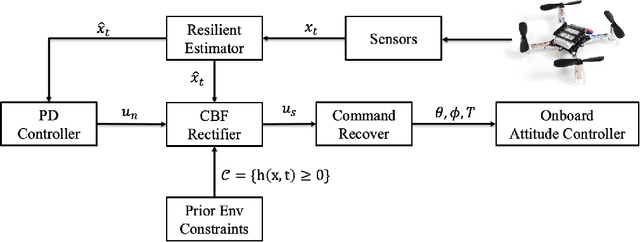


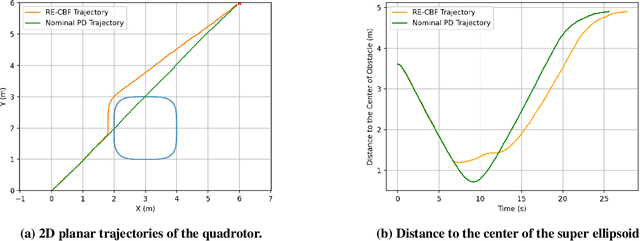
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.