 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRCUKF: Data-Driven Modeling Meets Bayesian Estimation
Aug 07, 2025Accurate modeling is crucial in many engineering and scientific applications, yet obtaining a reliable process model for complex systems is often challenging. To address this challenge, we propose a novel framework, reservoir computing with unscented Kalman filtering (RCUKF), which integrates data-driven modeling via reservoir computing (RC) with Bayesian estimation through the unscented Kalman filter (UKF). The RC component learns the nonlinear system dynamics directly from data, serving as a surrogate process model in the UKF prediction step to generate state estimates in high-dimensional or chaotic regimes where nominal mathematical models may fail. Meanwhile, the UKF measurement update integrates real-time sensor data to correct potential drift in the data-driven model. We demonstrate RCUKF effectiveness on well-known benchmark problems and a real-time vehicle trajectory estimation task in a high-fidelity simulation environment.
Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Jun 28, 2024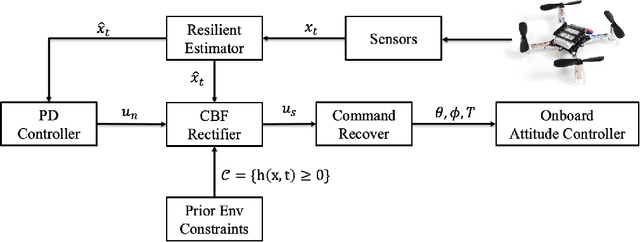


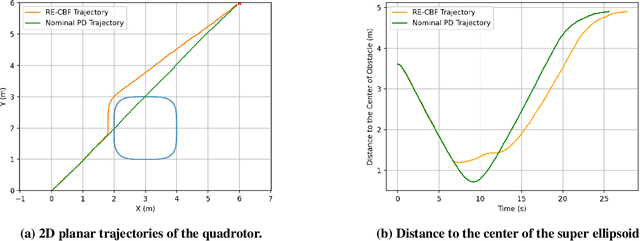
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.
Certified Robust Control under Adversarial Perturbations
Feb 04, 2023Autonomous systems increasingly rely on machine learning techniques to transform high-dimensional raw inputs into predictions that are then used for decision-making and control. However, it is often easy to maliciously manipulate such inputs and, as a result, predictions. While effective techniques have been proposed to certify the robustness of predictions to adversarial input perturbations, such techniques have been disembodied from control systems that make downstream use of the predictions. We propose the first approach for composing robustness certification of predictions with respect to raw input perturbations with robust control to obtain certified robustness of control to adversarial input perturbations. We use a case study of adaptive vehicle control to illustrate our approach and show the value of the resulting end-to-end certificates through extensive experiments.
Towards Resilient UAV: Escape Time in GPS Denied Environment with Sensor Drift
Jun 11, 2019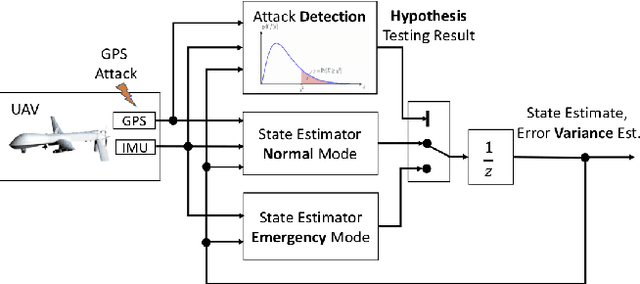
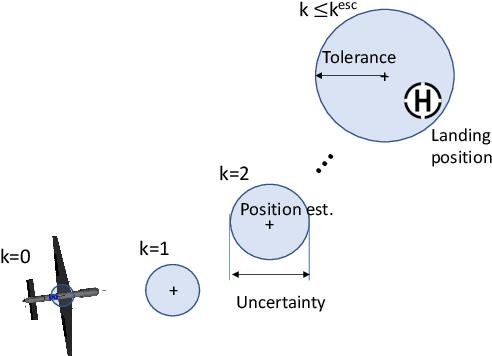
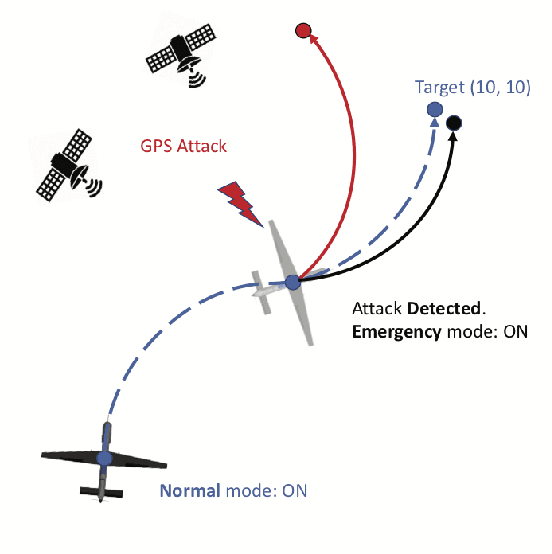
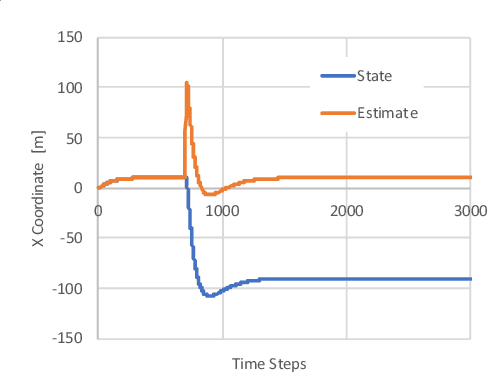
This paper considers a resilient state estimation framework for unmanned aerial vehicles (UAVs) that integrates a Kalman filter-like state estimator and an attack detector. When an attack is detected, the state estimator uses only IMU signals as the GPS signals do not contain legitimate information. This limited sensor availability induces a sensor drift problem questioning the reliability of the sensor estimates. We propose a new resilience measure, escape time, as the safe time within which the estimation errors remain in a tolerable region with high probability. This paper analyzes the stability of the proposed resilient estimation framework and quantifies a lower bound for the escape time. Moreover, simulations of the UAV model demonstrate the performance of the proposed framework and provide analytical results.