 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS2R-Bench: A Sim-to-Real Evaluation Benchmark for Autonomous Driving
May 24, 2025



Safety is a long-standing and the final pursuit in the development of autonomous driving systems, with a significant portion of safety challenge arising from perception. How to effectively evaluate the safety as well as the reliability of perception algorithms is becoming an emerging issue. Despite its critical importance, existing perception methods exhibit a limitation in their robustness, primarily due to the use of benchmarks are entierly simulated, which fail to align predicted results with actual outcomes, particularly under extreme weather conditions and sensor anomalies that are prevalent in real-world scenarios. To fill this gap, in this study, we propose a Sim-to-Real Evaluation Benchmark for Autonomous Driving (S2R-Bench). We collect diverse sensor anomaly data under various road conditions to evaluate the robustness of autonomous driving perception methods in a comprehensive and realistic manner. This is the first corruption robustness benchmark based on real-world scenarios, encompassing various road conditions, weather conditions, lighting intensities, and time periods. By comparing real-world data with simulated data, we demonstrate the reliability and practical significance of the collected data for real-world applications. We hope that this dataset will advance future research and contribute to the development of more robust perception models for autonomous driving. This dataset is released on https://github.com/adept-thu/S2R-Bench.
AndroidGen: Building an Android Language Agent under Data Scarcity
Apr 27, 2025
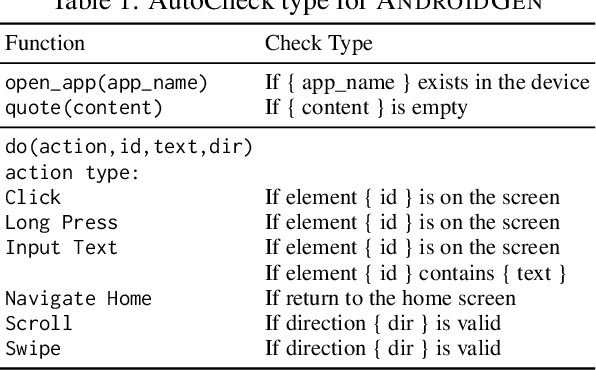
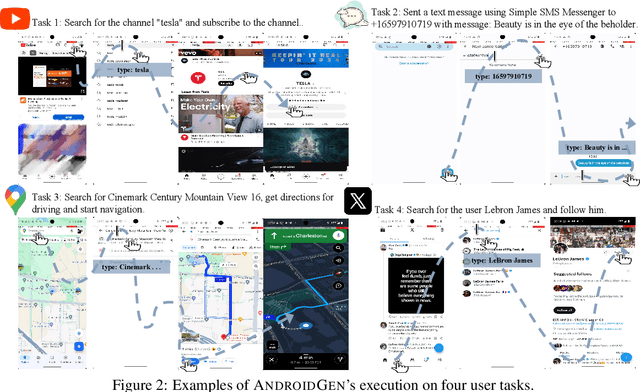
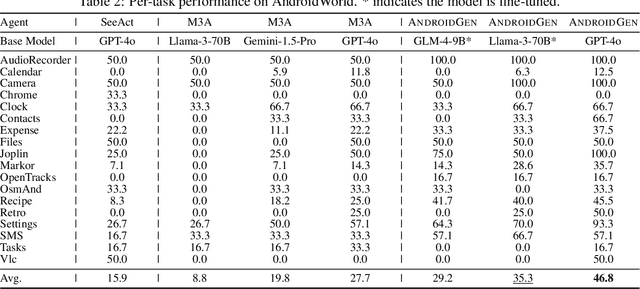
Large language models have opened up a world of possibilities for various NLP tasks, sparking optimism for the future. Despite their potential, LLMs have yet to be widely used as agents on real mobile devices. The main challenge is the need for high-quality data sources. Time constraints and labor intensity often hinder human annotation. On the other hand, existing LLMs exhibit inadequate completion rates and need a robust data filtration strategy. Given these challenges, we develop a framework called AndroidGen to enhance the capabilities of LLM-based agents under data scarcity. In addition, we leverage AndroidGen to collect trajectories given human tasks and train open-source LLMs on these trajectories to develop an open-source mobile agent without manually labeled trajectories. We extensively evaluate AndroidGen with AndroidWorld, AitW, and various popular applications, demonstrating its improvements and revealing potential areas for future improvement. Code, model, and data are available at https://github.com/THUDM/AndroidGen.
AutoGLM: Autonomous Foundation Agents for GUIs
Oct 28, 2024



We present AutoGLM, a new series in the ChatGLM family, designed to serve as foundation agents for autonomous control of digital devices through Graphical User Interfaces (GUIs). While foundation models excel at acquiring human knowledge, they often struggle with decision-making in dynamic real-world environments, limiting their progress toward artificial general intelligence. This limitation underscores the importance of developing foundation agents capable of learning through autonomous environmental interactions by reinforcing existing models. Focusing on Web Browser and Phone as representative GUI scenarios, we have developed AutoGLM as a practical foundation agent system for real-world GUI interactions. Our approach integrates a comprehensive suite of techniques and infrastructures to create deployable agent systems suitable for user delivery. Through this development, we have derived two key insights: First, the design of an appropriate "intermediate interface" for GUI control is crucial, enabling the separation of planning and grounding behaviors, which require distinct optimization for flexibility and accuracy respectively. Second, we have developed a novel progressive training framework that enables self-evolving online curriculum reinforcement learning for AutoGLM. Our evaluations demonstrate AutoGLM's effectiveness across multiple domains. For web browsing, AutoGLM achieves a 55.2% success rate on VAB-WebArena-Lite (improving to 59.1% with a second attempt) and 96.2% on OpenTable evaluation tasks. In Android device control, AutoGLM attains a 36.2% success rate on AndroidLab (VAB-Mobile) and 89.7% on common tasks in popular Chinese APPs.
Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Jun 28, 2024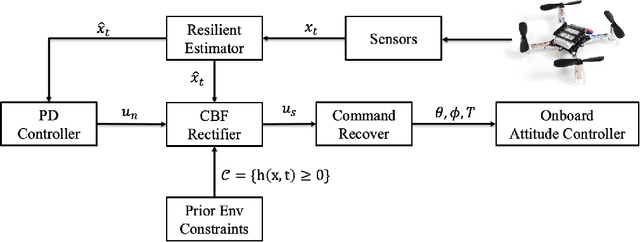


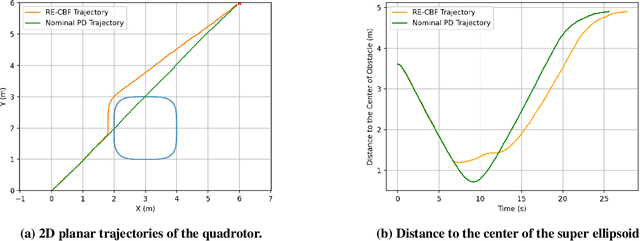
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.
Deep-PE: A Learning-Based Pose Evaluator for Point Cloud Registration
May 25, 2024



In the realm of point cloud registration, the most prevalent pose evaluation approaches are statistics-based, identifying the optimal transformation by maximizing the number of consistent correspondences. However, registration recall decreases significantly when point clouds exhibit a low overlap rate, despite efforts in designing feature descriptors and establishing correspondences. In this paper, we introduce Deep-PE, a lightweight, learning-based pose evaluator designed to enhance the accuracy of pose selection, especially in challenging point cloud scenarios with low overlap. Our network incorporates a Pose-Aware Attention (PAA) module to simulate and learn the alignment status of point clouds under various candidate poses, alongside a Pose Confidence Prediction (PCP) module that predicts the likelihood of successful registration. These two modules facilitate the learning of both local and global alignment priors. Extensive tests across multiple benchmarks confirm the effectiveness of Deep-PE. Notably, on 3DLoMatch with a low overlap rate, Deep-PE significantly outperforms state-of-the-art methods by at least 8% and 11% in registration recall under handcrafted FPFH and learning-based FCGF descriptors, respectively. To the best of our knowledge, this is the first study to utilize deep learning to select the optimal pose without the explicit need for input correspondences.
Against The Achilles' Heel: A Survey on Red Teaming for Generative Models
Mar 31, 2024



Generative models are rapidly gaining popularity and being integrated into everyday applications, raising concerns over their safety issues as various vulnerabilities are exposed. Faced with the problem, the field of red teaming is experiencing fast-paced growth, which highlights the need for a comprehensive organization covering the entire pipeline and addressing emerging topics for the community. Our extensive survey, which examines over 120 papers, introduces a taxonomy of fine-grained attack strategies grounded in the inherent capabilities of language models. Additionally, we have developed the searcher framework that unifies various automatic red teaming approaches. Moreover, our survey covers novel areas including multimodal attacks and defenses, risks around multilingual models, overkill of harmless queries, and safety of downstream applications. We hope this survey can provide a systematic perspective on the field and unlock new areas of research.
D3Former: Jointly Learning Repeatable Dense Detectors and Feature-enhanced Descriptors via Saliency-guided Transformer
Dec 20, 2023Establishing accurate and representative matches is a crucial step in addressing the point cloud registration problem. A commonly employed approach involves detecting keypoints with salient geometric features and subsequently mapping these keypoints from one frame of the point cloud to another. However, methods within this category are hampered by the repeatability of the sampled keypoints. In this paper, we introduce a saliency-guided trans\textbf{former}, referred to as \textit{D3Former}, which entails the joint learning of repeatable \textbf{D}ense \textbf{D}etectors and feature-enhanced \textbf{D}escriptors. The model comprises a Feature Enhancement Descriptor Learning (FEDL) module and a Repetitive Keypoints Detector Learning (RKDL) module. The FEDL module utilizes a region attention mechanism to enhance feature distinctiveness, while the RKDL module focuses on detecting repeatable keypoints to enhance matching capabilities. Extensive experimental results on challenging indoor and outdoor benchmarks demonstrate that our proposed method consistently outperforms state-of-the-art point cloud matching methods. Notably, tests on 3DLoMatch, even with a low overlap ratio, show that our method consistently outperforms recently published approaches such as RoReg and RoITr. For instance, with the number of extracted keypoints reduced to 250, the registration recall scores for RoReg, RoITr, and our method are 64.3\%, 73.6\%, and 76.5\%, respectively.
UTBoost: A Tree-boosting based System for Uplift Modeling
Dec 05, 2023


Uplift modeling refers to the set of machine learning techniques that a manager may use to estimate customer uplift, that is, the net effect of an action on some customer outcome. By identifying the subset of customers for whom a treatment will have the greatest effect, uplift models assist decision-makers in optimizing resource allocations and maximizing overall returns. Accurately estimating customer uplift poses practical challenges, as it requires assessing the difference between two mutually exclusive outcomes for each individual. In this paper, we propose two innovative adaptations of the well-established Gradient Boosting Decision Trees (GBDT) algorithm, which learn the causal effect in a sequential way and overcome the counter-factual nature. Both approaches innovate existing techniques in terms of ensemble learning method and learning objectives, respectively. Experiments on large-scale datasets demonstrate the usefulness of the proposed methods, which often yielding remarkable improvements over base models. To facilitate the application, we develop the UTBoost, an end-to-end tree boosting system specifically designed for uplift modeling. The package is open source and has been optimized for training speed to meet the needs of real industrial applications.
OAAFormer: Robust and Efficient Point Cloud Registration Through Overlapping-Aware Attention in Transformer
Oct 15, 2023



In the domain of point cloud registration, the coarse-to-fine feature matching paradigm has received substantial attention owing to its impressive performance. This paradigm involves a two-step process: first, the extraction of multi-level features, and subsequently, the propagation of correspondences from coarse to fine levels. Nonetheless, this paradigm exhibits two notable limitations.Firstly, the utilization of the Dual Softmax operation has the potential to promote one-to-one correspondences between superpoints, inadvertently excluding valuable correspondences. This propensity arises from the fact that a source superpoint typically maintains associations with multiple target superpoints. Secondly, it is imperative to closely examine the overlapping areas between point clouds, as only correspondences within these regions decisively determine the actual transformation. Based on these considerations, we propose {\em OAAFormer} to enhance correspondence quality. On one hand, we introduce a soft matching mechanism, facilitating the propagation of potentially valuable correspondences from coarse to fine levels. Additionally, we integrate an overlapping region detection module to minimize mismatches to the greatest extent possible. Furthermore, we introduce a region-wise attention module with linear complexity during the fine-level matching phase, designed to enhance the discriminative capabilities of the extracted features. Tests on the challenging 3DLoMatch benchmark demonstrate that our approach leads to a substantial increase of about 7\% in the inlier ratio, as well as an enhancement of 2-4\% in registration recall. =
Indoor Exploration and Simultaneous Trolley Collection Through Task-Oriented Environment Partitioning
Sep 20, 2023



In this paper, we present a simultaneous exploration and object search framework for the application of autonomous trolley collection. For environment representation, a task-oriented environment partitioning algorithm is presented to extract diverse information for each sub-task. First, LiDAR data is classified as potential objects, walls, and obstacles after outlier removal. Segmented point clouds are then transformed into a hybrid map with the following functional components: object proposals to avoid missing trolleys during exploration; room layouts for semantic space segmentation; and polygonal obstacles containing geometry information for efficient motion planning. For exploration and simultaneous trolley collection, we propose an efficient exploration-based object search method. First, a traveling salesman problem with precedence constraints (TSP-PC) is formulated by grouping frontiers and object proposals. The next target is selected by prioritizing object search while avoiding excessive robot backtracking. Then, feasible trajectories with adequate obstacle clearance are generated by topological graph search. We validate the proposed framework through simulations and demonstrate the system with real-world autonomous trolley collection tasks.