 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemorize-and-Generate: Towards Long-Term Consistency in Real-Time Video Generation
Dec 23, 2025Frame-level autoregressive (frame-AR) models have achieved significant progress, enabling real-time video generation comparable to bidirectional diffusion models and serving as a foundation for interactive world models and game engines. However, current approaches in long video generation typically rely on window attention, which naively discards historical context outside the window, leading to catastrophic forgetting and scene inconsistency; conversely, retaining full history incurs prohibitive memory costs. To address this trade-off, we propose Memorize-and-Generate (MAG), a framework that decouples memory compression and frame generation into distinct tasks. Specifically, we train a memory model to compress historical information into a compact KV cache, and a separate generator model to synthesize subsequent frames utilizing this compressed representation. Furthermore, we introduce MAG-Bench to strictly evaluate historical memory retention. Extensive experiments demonstrate that MAG achieves superior historical scene consistency while maintaining competitive performance on standard video generation benchmarks.
Robust Docking Maneuvers for Autonomous Trolley Collection: An Optimization-Based Visual Servoing Scheme
Sep 09, 2025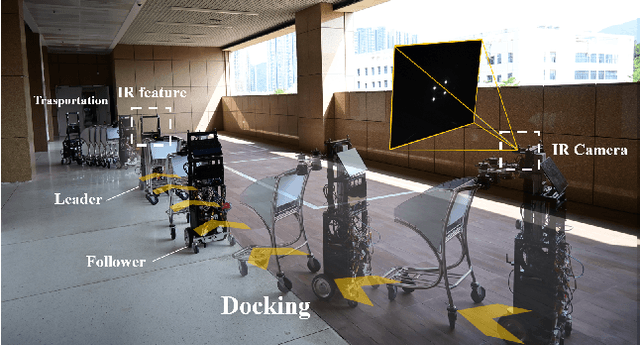
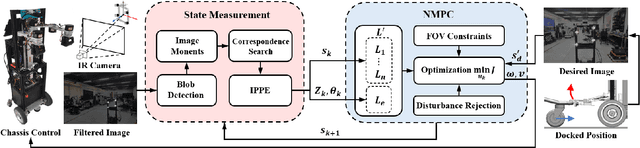
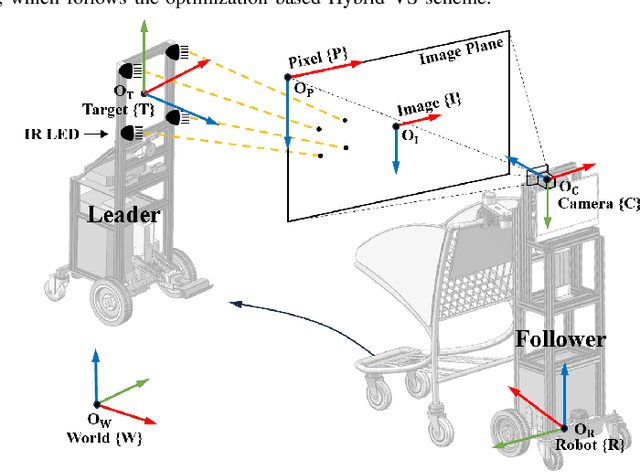
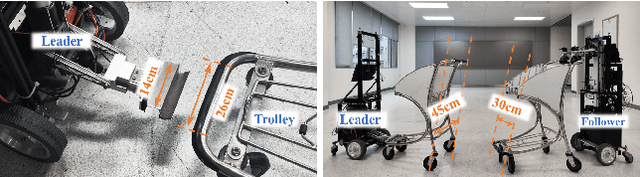
Service robots have demonstrated significant potential for autonomous trolley collection and redistribution in public spaces like airports or warehouses to improve efficiency and reduce cost. Usually, a fully autonomous system for the collection and transportation of multiple trolleys is based on a Leader-Follower formation of mobile manipulators, where reliable docking maneuvers of the mobile base are essential to align trolleys into organized queues. However, developing a vision-based robotic docking system faces significant challenges: high precision requirements, environmental disturbances, and inherent robot constraints. To address these challenges, we propose an optimization-based Visual Servoing scheme that incorporates active infrared markers for robust feature extraction across diverse lighting conditions. This framework explicitly models nonholonomic kinematics and visibility constraints within the Hybrid Visual Servoing problem, augmented with an observer for disturbance rejection to ensure precise and stable docking. Experimental results across diverse environments demonstrate the robustness of this system, with quantitative evaluations confirming high docking accuracy.
Socially Aware Robot Crowd Navigation via Online Uncertainty-Driven Risk Adaptation
Jun 17, 2025Navigation in human-robot shared crowded environments remains challenging, as robots are expected to move efficiently while respecting human motion conventions. However, many existing approaches emphasize safety or efficiency while overlooking social awareness. This article proposes Learning-Risk Model Predictive Control (LR-MPC), a data-driven navigation algorithm that balances efficiency, safety, and social awareness. LR-MPC consists of two phases: an offline risk learning phase, where a Probabilistic Ensemble Neural Network (PENN) is trained using risk data from a heuristic MPC-based baseline (HR-MPC), and an online adaptive inference phase, where local waypoints are sampled and globally guided by a Multi-RRT planner. Each candidate waypoint is evaluated for risk by PENN, and predictions are filtered using epistemic and aleatoric uncertainty to ensure robust decision-making. The safest waypoint is selected as the MPC input for real-time navigation. Extensive experiments demonstrate that LR-MPC outperforms baseline methods in success rate and social awareness, enabling robots to navigate complex crowds with high adaptability and low disruption. A website about this work is available at https://sites.google.com/view/lr-mpc.
Collision Risk Quantification and Conflict Resolution in Trajectory Tracking for Acceleration-Actuated Multi-Robot Systems
Jan 07, 2025



One of the pivotal challenges in a multi-robot system is how to give attention to accuracy and efficiency while ensuring safety. Prior arts cannot strictly guarantee collision-free for an arbitrarily large number of robots or the results are considerably conservative. Smoothness of the avoidance trajectory also needs to be further optimized. This paper proposes an accelerationactuated simultaneous obstacle avoidance and trajectory tracking method for arbitrarily large teams of robots, that provides a nonconservative collision avoidance strategy and gives approaches for deadlock avoidance. We propose two ways of deadlock resolution, one involves incorporating an auxiliary velocity vector into the error function of the trajectory tracking module, which is proven to have no influence on global convergence of the tracking error. Furthermore, unlike the traditional methods that they address conflicts after a deadlock occurs, our decision-making mechanism avoids the near-zero velocity, which is much more safer and efficient in crowed environments. Extensive comparison show that the proposed method is superior to the existing studies when deployed in a large-scale robot system, with minimal invasiveness.
NAMR-RRT: Neural Adaptive Motion Planning for Mobile Robots in Dynamic Environments
Nov 01, 2024Robots are increasingly deployed in dynamic and crowded environments, such as urban areas and shopping malls, where efficient and robust navigation is crucial. Traditional risk-based motion planning algorithms face challenges in such scenarios due to the lack of a well-defined search region, leading to inefficient exploration in irrelevant areas. While bi-directional and multi-directional search strategies can improve efficiency, they still result in significant unnecessary exploration. This article introduces the Neural Adaptive Multi-directional Risk-based Rapidly-exploring Random Tree (NAMR-RRT) to address these limitations. NAMR-RRT integrates neural network-generated heuristic regions to dynamically guide the exploration process, continuously refining the heuristic region and sampling rates during the planning process. This adaptive feature significantly enhances performance compared to neural-based methods with fixed heuristic regions and sampling rates. NAMR-RRT improves planning efficiency, reduces trajectory length, and ensures higher success by focusing the search on promising areas and continuously adjusting to environments. The experiment results from both simulations and real-world applications demonstrate the robustness and effectiveness of our proposed method in navigating dynamic environments. A website about this work is available at https://sites.google.com/view/namr-rrt.
HPPS: A Hierarchical Progressive Perception System for Luggage Trolley Detection and Localization at Airports
May 09, 2024



The robotic autonomous luggage trolley collection system employs robots to gather and transport scattered luggage trolleys at airports. However, existing methods for detecting and locating these luggage trolleys often fail when they are not fully visible. To address this, we introduce the Hierarchical Progressive Perception System (HPPS), which enhances the detection and localization of luggage trolleys under partial occlusion. The HPPS processes the luggage trolley's position and orientation separately, which requires only RGB images for labeling and training, eliminating the need for 3D coordinates and alignment. The HPPS can accurately determine the position of the luggage trolley with just one well-detected keypoint and estimate the luggage trolley's orientation when it is partially occluded. Once the luggage trolley's initial pose is detected, HPPS updates this information continuously to refine its accuracy until the robot begins grasping. The experiments on detection and localization demonstrate that HPPS is more reliable under partial occlusion compared to existing methods. Its effectiveness and robustness have also been confirmed through practical tests in actual luggage trolley collection tasks. A website about this work is available at HPPS.
Autonomous Multiple-Trolley Collection System with Nonholonomic Robots: Design, Control, and Implementation
Jan 16, 2024



The intricate and multi-stage task in dynamic public spaces like luggage trolley collection in airports presents both a promising opportunity and an ongoing challenge for automated service robots. Previous research has primarily focused on handling a single trolley or individual functional components, creating a gap in providing cost-effective and efficient solutions for practical scenarios. In this paper, we propose a mobile manipulation robot incorporated with an autonomy framework for the collection and transportation of multiple trolleys that can significantly enhance operational efficiency. We address the key challenges in the trolley collection problem through the novel design of the mechanical system and the vision-based control strategy. We design a lightweight manipulator and docking mechanism, optimized for the sequential stacking and transportation of multiple trolleys. Additionally, based on the Control Lyapunov Function and Control Barrier Function, we propose a novel vision-based control with the online Quadratic Programming which significantly improves the accuracy and efficiency of the collection process. The practical application of our system is demonstrated in real world scenarios, where it successfully executes multiple-trolley collection tasks.
Multi-Risk-RRT: An Efficient Motion Planning Algorithm for Robotic Autonomous Luggage Trolley Collection at Airports
Sep 20, 2023



Robots have become increasingly prevalent in dynamic and crowded environments such as airports and shopping malls. In these scenarios, the critical challenges for robot navigation are reliability and timely arrival at predetermined destinations. While existing risk-based motion planning algorithms effectively reduce collision risks with static and dynamic obstacles, there is still a need for significant performance improvements. Specifically, the dynamic environments demand more rapid responses and robust planning. To address this gap, we introduce a novel risk-based multi-directional sampling algorithm, Multi-directional Risk-based Rapidly-exploring Random Tree (Multi-Risk-RRT). Unlike traditional algorithms that solely rely on a rooted tree or double trees for state space exploration, our approach incorporates multiple sub-trees. Each sub-tree independently explores its surrounding environment. At the same time, the primary rooted tree collects the heuristic information from these sub-trees, facilitating rapid progress toward the goal state. Our evaluations, including simulation and real-world environmental studies, demonstrate that Multi-Risk-RRT outperforms existing unidirectional and bi-directional risk-based algorithms in planning efficiency and robustness.
Indoor Exploration and Simultaneous Trolley Collection Through Task-Oriented Environment Partitioning
Sep 20, 2023



In this paper, we present a simultaneous exploration and object search framework for the application of autonomous trolley collection. For environment representation, a task-oriented environment partitioning algorithm is presented to extract diverse information for each sub-task. First, LiDAR data is classified as potential objects, walls, and obstacles after outlier removal. Segmented point clouds are then transformed into a hybrid map with the following functional components: object proposals to avoid missing trolleys during exploration; room layouts for semantic space segmentation; and polygonal obstacles containing geometry information for efficient motion planning. For exploration and simultaneous trolley collection, we propose an efficient exploration-based object search method. First, a traveling salesman problem with precedence constraints (TSP-PC) is formulated by grouping frontiers and object proposals. The next target is selected by prioritizing object search while avoiding excessive robot backtracking. Then, feasible trajectories with adequate obstacle clearance are generated by topological graph search. We validate the proposed framework through simulations and demonstrate the system with real-world autonomous trolley collection tasks.
A Systematic Evaluation of Different Indoor Localization Methods in Robotic Autonomous Luggage Trolley Collection at Airports
Mar 12, 2023This article addresses the localization problem in robotic autonomous luggage trolley collection at airports and provides a systematic evaluation of different methods to solve it. The robotic autonomous luggage trolley collection is a complex system that involves object detection, localization, motion planning and control, manipulation, etc. Among these components, effective localization is essential for the robot to employ subsequent motion planning and end-effector manipulation because it can provide a correct goal position. In this article, we survey four popular and representative localization methods to achieve object localization in the luggage collection process, including radio frequency identification (RFID), Keypoints, ultrawideband (UWB), and Reflectors. To test their performance, we construct a qualitative evaluation framework with Localization Accuracy, Mobile Power Supplies, Coverage Area, Cost, and Scalability. Besides, we conduct a series of quantitative experiments regarding Localization Accuracy and Success Rate on a real-world robotic autonomous luggage trolley collection system. We further analyze the performance of different localization methods based on experiment results, revealing that the Keypoints method is most suitable for indoor environments to achieve the luggage trolley collection.