 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Docking Maneuvers for Autonomous Trolley Collection: An Optimization-Based Visual Servoing Scheme
Sep 09, 2025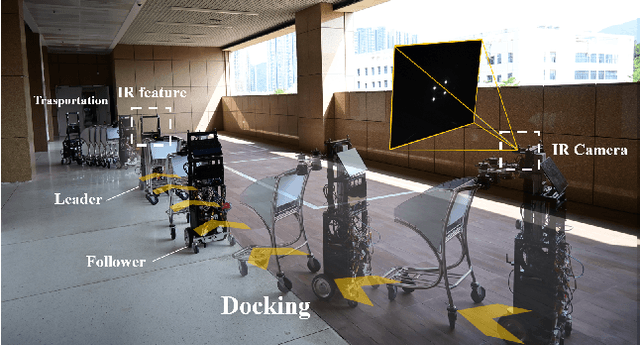
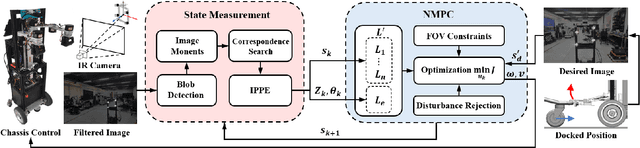
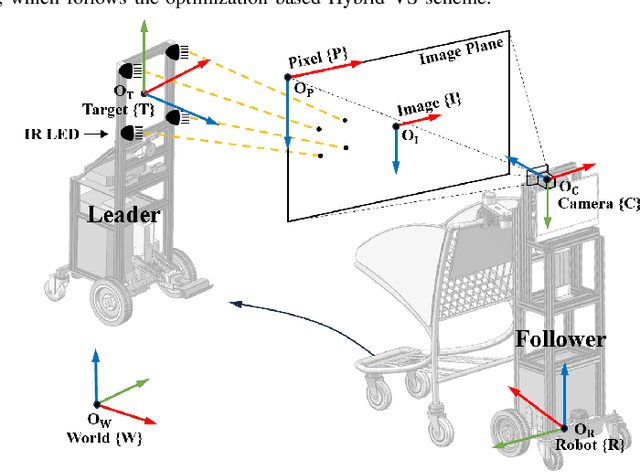
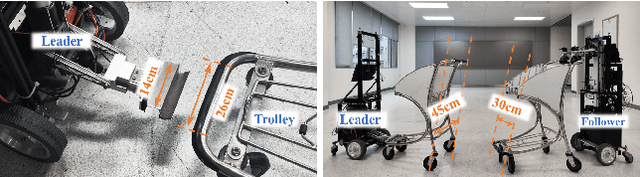
Service robots have demonstrated significant potential for autonomous trolley collection and redistribution in public spaces like airports or warehouses to improve efficiency and reduce cost. Usually, a fully autonomous system for the collection and transportation of multiple trolleys is based on a Leader-Follower formation of mobile manipulators, where reliable docking maneuvers of the mobile base are essential to align trolleys into organized queues. However, developing a vision-based robotic docking system faces significant challenges: high precision requirements, environmental disturbances, and inherent robot constraints. To address these challenges, we propose an optimization-based Visual Servoing scheme that incorporates active infrared markers for robust feature extraction across diverse lighting conditions. This framework explicitly models nonholonomic kinematics and visibility constraints within the Hybrid Visual Servoing problem, augmented with an observer for disturbance rejection to ensure precise and stable docking. Experimental results across diverse environments demonstrate the robustness of this system, with quantitative evaluations confirming high docking accuracy.
Omni Differential Drive for Simultaneous Reconfiguration and Omnidirectional Mobility of Wheeled Robots
Dec 14, 2024Wheeled robots are highly efficient in human living environments. However, conventional wheeled designs, limited by degrees of freedom, struggle to meet varying footprint needs and achieve omnidirectional mobility. This paper proposes a novel robot drive model inspired by human movements, termed as the Omni Differential Drive (ODD). The ODD model innovatively utilizes a lateral differential drive to adjust wheel spacing without adding additional actuators to the existing omnidirectional drive. This approach enables wheeled robots to achieve both simultaneous reconfiguration and omnidirectional mobility. Additionally, a prototype was developed to validate the ODD, followed by kinematic analysis. Control systems for self-balancing and motion were designed and implemented. Experimental validations confirmed the feasibility of the ODD mechanism and the effectiveness of the control strategies. The results underline the potential of this innovative drive system to enhance the mobility and adaptability of robotic platforms.
NAMR-RRT: Neural Adaptive Motion Planning for Mobile Robots in Dynamic Environments
Nov 01, 2024Robots are increasingly deployed in dynamic and crowded environments, such as urban areas and shopping malls, where efficient and robust navigation is crucial. Traditional risk-based motion planning algorithms face challenges in such scenarios due to the lack of a well-defined search region, leading to inefficient exploration in irrelevant areas. While bi-directional and multi-directional search strategies can improve efficiency, they still result in significant unnecessary exploration. This article introduces the Neural Adaptive Multi-directional Risk-based Rapidly-exploring Random Tree (NAMR-RRT) to address these limitations. NAMR-RRT integrates neural network-generated heuristic regions to dynamically guide the exploration process, continuously refining the heuristic region and sampling rates during the planning process. This adaptive feature significantly enhances performance compared to neural-based methods with fixed heuristic regions and sampling rates. NAMR-RRT improves planning efficiency, reduces trajectory length, and ensures higher success by focusing the search on promising areas and continuously adjusting to environments. The experiment results from both simulations and real-world applications demonstrate the robustness and effectiveness of our proposed method in navigating dynamic environments. A website about this work is available at https://sites.google.com/view/namr-rrt.
ODD: Omni Differential Drive for Simultaneous Reconfiguration and Omnidirectional Mobility of Wheeled Robots
Jul 14, 2024



Wheeled robots are highly efficient in human living environments. However, conventional wheeled designs, with their limited degrees of freedom and constraints in robot configuration, struggle to simultaneously achieve stability, passability, and agility due to varying footprint needs. This paper proposes a novel robot drive model inspired by human movements, termed as the Omni Differential Drive (ODD). The ODD model innovatively utilizes a lateral differential drive to adjust wheel spacing without adding additional actuators to the existing omnidirectional drive. This approach enables wheeled robots to achieve both simultaneous reconfiguration and omnidirectional mobility. To validate the feasibility of the ODD model, a functional prototype was developed, followed by comprehensive kinematic analyses. Control systems for self-balancing and motion control were designed and implemented. Experimental validations confirmed the feasibility of the ODD mechanism and the effectiveness of the control strategies. The results underline the potential of this innovative drive system to enhance the mobility and adaptability of robotic platforms.
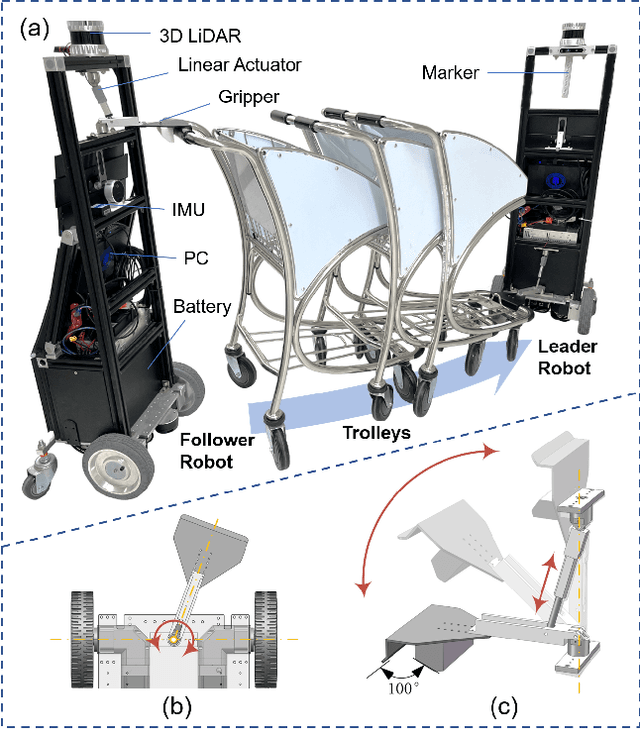
Autonomous Multiple-Trolley Collection System with Nonholonomic Robots: Design, Control, and Implementation
Jan 16, 2024



The intricate and multi-stage task in dynamic public spaces like luggage trolley collection in airports presents both a promising opportunity and an ongoing challenge for automated service robots. Previous research has primarily focused on handling a single trolley or individual functional components, creating a gap in providing cost-effective and efficient solutions for practical scenarios. In this paper, we propose a mobile manipulation robot incorporated with an autonomy framework for the collection and transportation of multiple trolleys that can significantly enhance operational efficiency. We address the key challenges in the trolley collection problem through the novel design of the mechanical system and the vision-based control strategy. We design a lightweight manipulator and docking mechanism, optimized for the sequential stacking and transportation of multiple trolleys. Additionally, based on the Control Lyapunov Function and Control Barrier Function, we propose a novel vision-based control with the online Quadratic Programming which significantly improves the accuracy and efficiency of the collection process. The practical application of our system is demonstrated in real world scenarios, where it successfully executes multiple-trolley collection tasks.
Multi-Risk-RRT: An Efficient Motion Planning Algorithm for Robotic Autonomous Luggage Trolley Collection at Airports
Sep 20, 2023



Robots have become increasingly prevalent in dynamic and crowded environments such as airports and shopping malls. In these scenarios, the critical challenges for robot navigation are reliability and timely arrival at predetermined destinations. While existing risk-based motion planning algorithms effectively reduce collision risks with static and dynamic obstacles, there is still a need for significant performance improvements. Specifically, the dynamic environments demand more rapid responses and robust planning. To address this gap, we introduce a novel risk-based multi-directional sampling algorithm, Multi-directional Risk-based Rapidly-exploring Random Tree (Multi-Risk-RRT). Unlike traditional algorithms that solely rely on a rooted tree or double trees for state space exploration, our approach incorporates multiple sub-trees. Each sub-tree independently explores its surrounding environment. At the same time, the primary rooted tree collects the heuristic information from these sub-trees, facilitating rapid progress toward the goal state. Our evaluations, including simulation and real-world environmental studies, demonstrate that Multi-Risk-RRT outperforms existing unidirectional and bi-directional risk-based algorithms in planning efficiency and robustness.
Indoor Exploration and Simultaneous Trolley Collection Through Task-Oriented Environment Partitioning
Sep 20, 2023



In this paper, we present a simultaneous exploration and object search framework for the application of autonomous trolley collection. For environment representation, a task-oriented environment partitioning algorithm is presented to extract diverse information for each sub-task. First, LiDAR data is classified as potential objects, walls, and obstacles after outlier removal. Segmented point clouds are then transformed into a hybrid map with the following functional components: object proposals to avoid missing trolleys during exploration; room layouts for semantic space segmentation; and polygonal obstacles containing geometry information for efficient motion planning. For exploration and simultaneous trolley collection, we propose an efficient exploration-based object search method. First, a traveling salesman problem with precedence constraints (TSP-PC) is formulated by grouping frontiers and object proposals. The next target is selected by prioritizing object search while avoiding excessive robot backtracking. Then, feasible trajectories with adequate obstacle clearance are generated by topological graph search. We validate the proposed framework through simulations and demonstrate the system with real-world autonomous trolley collection tasks.
Collaborative Trolley Transportation System with Autonomous Nonholonomic Robots
Apr 03, 2023
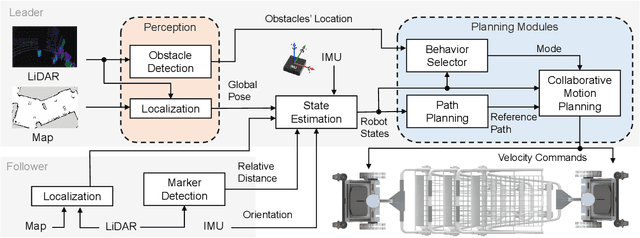
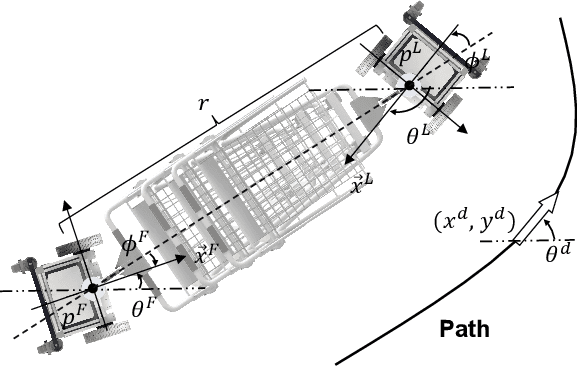
Cooperative object transportation using multiple robots has been intensively studied in the control and robotics literature, but most approaches are either only applicable to omnidirectional robots or lack a complete navigation and decision-making framework that operates in real time. This paper presents an autonomous nonholonomic multi-robot system and an end-to-end hierarchical autonomy framework for collaborative luggage trolley transportation. This framework finds kinematic-feasible paths, computes online motion plans, and provides feedback that enables the multi-robot system to handle long lines of luggage trolleys and navigate obstacles and pedestrians while dealing with multiple inherently complex and coupled constraints. We demonstrate the designed collaborative trolley transportation system through practical transportation tasks, and the experiment results reveal their effectiveness and reliability in complex and dynamic environments.