 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCANINE: Coaching Visually Impaired Users for Interactive Navigation with a Robot Guide Dog
May 19, 2026Robot guide dogs offer navigation assistance that greatly expands the independent mobility of the visually impaired, but their effective use requires subtle human-robot coordination that is difficult for users to learn from generic verbal instructions. To tackle this challenge, we present CANINE, an automated coaching system that trains users for interactive navigation with a robot guide dog, through personalized, adaptive verbal feedback. CANINE decomposes a complex coordination task into sub-skills and operates at two levels. At the high level, it decides what to train by tracking the learner's proficiency across sub-skills using knowledge tracing and prioritizing training on the weakest areas. At the low level, CANINE decides how to train each sub-skill by observing each human practice episode, using foundation models to infer the underlying causes of errors, and generating targeted verbal corrections adaptively. A controlled study with blindfolded participants, treated as a proxy population for quantitative evaluation, demonstrates that CANINE significantly improves both learning efficiency and final navigation performance compared to generic verbal instructions. We further validate CANINE through a retention study and an exploratory case study. The retention study shows lasting skill improvement after two weeks. The case study confirms CANINE's effectiveness in training a visually impaired user, while revealing additional design considerations for real-world deployment. Both are well aligned with the findings of the controlled study. Project page: https://cunjunyu.github.io/project/canine/
Visibility-Aware Mobile Grasping in Dynamic Environments
May 04, 2026This paper addresses the problem of mobile grasping in dynamic, unknown environments where a robot must operate under a limited field-of-view. The fundamental challenge is the inherent trade-off between ``seeing'' around to reduce environmental uncertainty and ``moving'' the body to achieve task progress in a high-dimensional configuration space, subject to visibility constraints. Previous approaches often assume known or static environments and decouple these objectives, failing to guarantee safety when unobserved dynamic obstacles intersect the robot's path during manipulation. In this paper, we propose a unified mobile grasping system comprising two core components: (1) an iterative low-level whole-body planner coupled with velocity-aware active perception to navigate dynamic environments safely; and (2) a hierarchical high-level planner based on behavior trees that adaptively generates subgoals to guide the robot through exploration and runtime failures. We provide experimental results across 400 randomized simulation scenarios and real-world deployment on a Fetch mobile manipulator. Results show that our system achieves a success rate of 68.8\% and 58.0\% in unknown static and dynamic environments, respectively, significantly boosting success rates by 22.8\% and 18.0\% over the \nam approach in both unknown static and dynamic environments, with improved collision safety.
From Obstacles to Etiquette: Robot Social Navigation with VLM-Informed Path Selection
Feb 09, 2026Navigating socially in human environments requires more than satisfying geometric constraints, as collision-free paths may still interfere with ongoing activities or conflict with social norms. Addressing this challenge calls for analyzing interactions between agents and incorporating common-sense reasoning into planning. This paper presents a social robot navigation framework that integrates geometric planning with contextual social reasoning. The system first extracts obstacles and human dynamics to generate geometrically feasible candidate paths, then leverages a fine-tuned vision-language model (VLM) to evaluate these paths, informed by contextually grounded social expectations, selecting a socially optimized path for the controller. This task-specific VLM distills social reasoning from large foundation models into a smaller and efficient model, allowing the framework to perform real-time adaptation in diverse human-robot interaction contexts. Experiments in four social navigation contexts demonstrate that our method achieves the best overall performance with the lowest personal space violation duration, the minimal pedestrian-facing time, and no social zone intrusions. Project page: https://path-etiquette.github.io
Robot Operation of Home Appliances by Reading User Manuals
May 26, 2025


Operating home appliances, among the most common tools in every household, is a critical capability for assistive home robots. This paper presents ApBot, a robot system that operates novel household appliances by "reading" their user manuals. ApBot faces multiple challenges: (i) infer goal-conditioned partial policies from their unstructured, textual descriptions in a user manual document, (ii) ground the policies to the appliance in the physical world, and (iii) execute the policies reliably over potentially many steps, despite compounding errors. To tackle these challenges, ApBot constructs a structured, symbolic model of an appliance from its manual, with the help of a large vision-language model (VLM). It grounds the symbolic actions visually to control panel elements. Finally, ApBot closes the loop by updating the model based on visual feedback. Our experiments show that across a wide range of simulated and real-world appliances, ApBot achieves consistent and statistically significant improvements in task success rate, compared with state-of-the-art large VLMs used directly as control policies. These results suggest that a structured internal representations plays an important role in robust robot operation of home appliances, especially, complex ones.
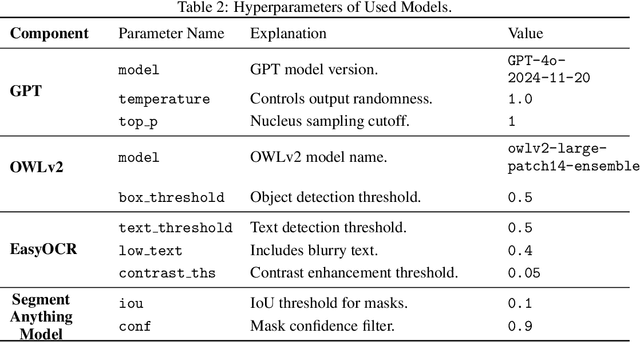
CHD: Coupled Hierarchical Diffusion for Long-Horizon Tasks
May 13, 2025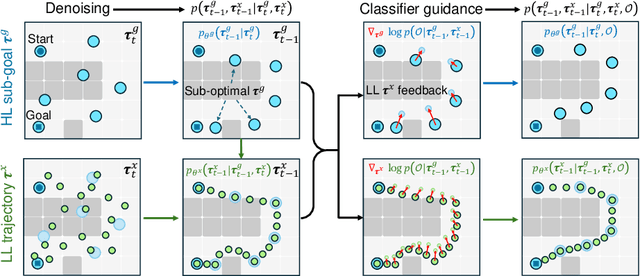
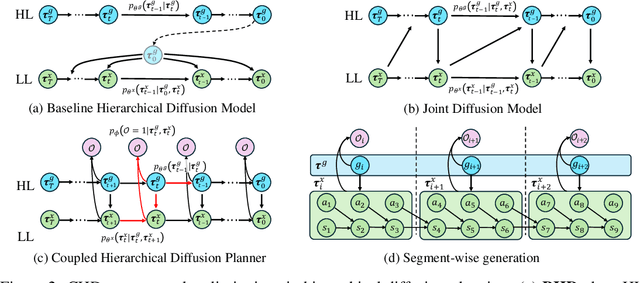
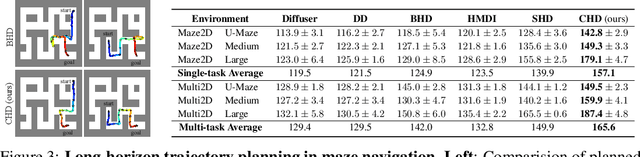
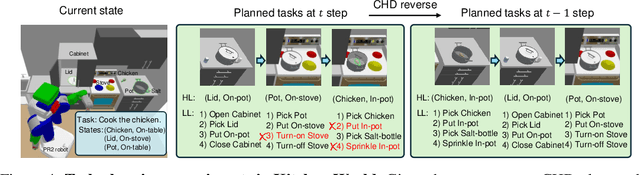
Diffusion-based planners have shown strong performance in short-horizon tasks but often fail in complex, long-horizon settings. We trace the failure to loose coupling between high-level (HL) sub-goal selection and low-level (LL) trajectory generation, which leads to incoherent plans and degraded performance. We propose Coupled Hierarchical Diffusion (CHD), a framework that models HL sub-goals and LL trajectories jointly within a unified diffusion process. A shared classifier passes LL feedback upstream so that sub-goals self-correct while sampling proceeds. This tight HL-LL coupling improves trajectory coherence and enables scalable long-horizon diffusion planning. Experiments across maze navigation, tabletop manipulation, and household environments show that CHD consistently outperforms both flat and hierarchical diffusion baselines. Our website is: https://sites.google.com/view/chd2025/home
FUNCTO: Function-Centric One-Shot Imitation Learning for Tool Manipulation
Feb 17, 2025



Learning tool use from a single human demonstration video offers a highly intuitive and efficient approach to robot teaching. While humans can effortlessly generalize a demonstrated tool manipulation skill to diverse tools that support the same function (e.g., pouring with a mug versus a teapot), current one-shot imitation learning (OSIL) methods struggle to achieve this. A key challenge lies in establishing functional correspondences between demonstration and test tools, considering significant geometric variations among tools with the same function (i.e., intra-function variations). To address this challenge, we propose FUNCTO (Function-Centric OSIL for Tool Manipulation), an OSIL method that establishes function-centric correspondences with a 3D functional keypoint representation, enabling robots to generalize tool manipulation skills from a single human demonstration video to novel tools with the same function despite significant intra-function variations. With this formulation, we factorize FUNCTO into three stages: (1) functional keypoint extraction, (2) function-centric correspondence establishment, and (3) functional keypoint-based action planning. We evaluate FUNCTO against exiting modular OSIL methods and end-to-end behavioral cloning methods through real-robot experiments on diverse tool manipulation tasks. The results demonstrate the superiority of FUNCTO when generalizing to novel tools with intra-function geometric variations. More details are available at https://sites.google.com/view/functo.
Robi Butler: Remote Multimodal Interactions with Household Robot Assistant
Sep 30, 2024In this paper, we introduce Robi Butler, a novel household robotic system that enables multimodal interactions with remote users. Building on the advanced communication interfaces, Robi Butler allows users to monitor the robot's status, send text or voice instructions, and select target objects by hand pointing. At the core of our system is a high-level behavior module, powered by Large Language Models (LLMs), that interprets multimodal instructions to generate action plans. These plans are composed of a set of open vocabulary primitives supported by Vision Language Models (VLMs) that handle both text and pointing queries. The integration of the above components allows Robi Butler to ground remote multimodal instructions in the real-world home environment in a zero-shot manner. We demonstrate the effectiveness and efficiency of this system using a variety of daily household tasks that involve remote users giving multimodal instructions. Additionally, we conducted a user study to analyze how multimodal interactions affect efficiency and user experience during remote human-robot interaction and discuss the potential improvements.
GSON: A Group-based Social Navigation Framework with Large Multimodal Model
Sep 26, 2024As the number of service robots and autonomous vehicles in human-centered environments grows, their requirements go beyond simply navigating to a destination. They must also take into account dynamic social contexts and ensure respect and comfort for others in shared spaces, which poses significant challenges for perception and planning. In this paper, we present a group-based social navigation framework GSON to enable mobile robots to perceive and exploit the social group of their surroundings by leveling the visual reasoning capability of the Large Multimodal Model (LMM). For perception, we apply visual prompting techniques to zero-shot extract the social relationship among pedestrians and combine the result with a robust pedestrian detection and tracking pipeline to alleviate the problem of low inference speed of the LMM. Given the perception result, the planning system is designed to avoid disrupting the current social structure. We adopt a social structure-based mid-level planner as a bridge between global path planning and local motion planning to preserve the global context and reactive response. The proposed method is validated on real-world mobile robot navigation tasks involving complex social structure understanding and reasoning. Experimental results demonstrate the effectiveness of the system in these scenarios compared with several baselines.
Octopi: Object Property Reasoning with Large Tactile-Language Models
May 05, 2024



Physical reasoning is important for effective robot manipulation. Recent work has investigated both vision and language modalities for physical reasoning; vision can reveal information about objects in the environment and language serves as an abstraction and communication medium for additional context. Although these works have demonstrated success on a variety of physical reasoning tasks, they are limited to physical properties that can be inferred from visual or language inputs. In this work, we investigate combining tactile perception with language, which enables embodied systems to obtain physical properties through interaction and apply common-sense reasoning. We contribute a new dataset PhysiCleAR, which comprises both physical/property reasoning tasks and annotated tactile videos obtained using a GelSight tactile sensor. We then introduce Octopi, a system that leverages both tactile representation learning and large vision-language models to predict and reason about tactile inputs with minimal language fine-tuning. Our evaluations on PhysiCleAR show that Octopi is able to effectively use intermediate physical property predictions to improve physical reasoning in both trained tasks and for zero-shot reasoning. PhysiCleAR and Octopi are available on https://github.com/clear-nus/octopi.
LLM-State: Expandable State Representation for Long-horizon Task Planning in the Open World
Nov 29, 2023



This work addresses the problem of long-horizon task planning with the Large Language Model (LLM) in an open-world household environment. Existing works fail to explicitly track key objects and attributes, leading to erroneous decisions in long-horizon tasks, or rely on highly engineered state features and feedback, which is not generalizable. We propose a novel, expandable state representation that provides continuous expansion and updating of object attributes from the LLM's inherent capabilities for context understanding and historical action reasoning. Our proposed representation maintains a comprehensive record of an object's attributes and changes, enabling robust retrospective summary of the sequence of actions leading to the current state. This allows enhanced context understanding for decision-making in task planning. We validate our model through experiments across simulated and real-world task planning scenarios, demonstrating significant improvements over baseline methods in a variety of tasks requiring long-horizon state tracking and reasoning.