 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Token per Multimodal Evidence: Latent Memory for Resource-Constrained QA
Jun 09, 2026External memory effectively grounds large language models (LLMs) and vision-language models (VLMs)-based question answering (QA) in relevant multimodal evidence. However, existing memory paradigms represent each memory item in raw text and image forms, so retrieval-based systems must pass the retrieved text or images to the generation LLMs/VLMs, resulting in high token consumption and storage pressure, making it unaffordable for resource-constrained applications. We propose Latent Memory, a latent-space memory paradigm that replaces each raw text or image evidence item with a single high-dimensional latent token produced by a small compressor LLM/VLM. Rather than retrieving raw evidence for generation, Latent Memory operates in a unified latent representation space: the query is embedded into this space to retrieve relevant latent tokens, and the retrieved latent tokens are directly prompted to a pretrained LLM or VLM for answer generation. To make each latent token simultaneously informative for reconstruction, retrieval, and generation, we train the compressor with reconstruction, contrastive, and distillation objectives in a unified end-to-end manner. Latent Memory is evaluated on seven text-only QA benchmarks (e.g., HotpotQA) and multimodal QA benchmarks, where it achieves competitive QA performance compared to advanced RAG baselines while consuming 3x to 10x fewer generator tokens. It can also deliver the strongest image-grounded QA performance on WebQA. Code is available at https://github.com/zz1358m/Latent-Memory-Master.
DDPS: Discrete Diffusion Posterior Sampling for Paths in Layered Graphs
Apr 29, 2025Diffusion models form an important class of generative models today, accounting for much of the state of the art in cutting edge AI research. While numerous extensions beyond image and video generation exist, few of such approaches address the issue of explicit constraints in the samples generated. In this paper, we study the problem of generating paths in a layered graph (a variant of a directed acyclic graph) using discrete diffusion models, while guaranteeing that our generated samples are indeed paths. Our approach utilizes a simple yet effective representation for paths which we call the padded adjacency-list matrix (PALM). In addition, we show how to effectively perform classifier guidance, which helps steer the sampled paths to specific preferred edges without any retraining of the diffusion model. Our preliminary results show that empirically, our method outperforms alternatives which do not explicitly account for path constraints.
Knowledge Database or Poison Base? Detecting RAG Poisoning Attack through LLM Activations
Nov 28, 2024



As Large Language Models (LLMs) are progressively deployed across diverse fields and real-world applications, ensuring the security and robustness of LLMs has become ever more critical. Retrieval-Augmented Generation (RAG) is a cutting-edge approach designed to address the limitations of large language models (LLMs). By retrieving information from the relevant knowledge database, RAG enriches the input to LLMs, enabling them to produce responses that are more accurate and contextually appropriate. It is worth noting that the knowledge database, being sourced from publicly available channels such as Wikipedia, inevitably introduces a new attack surface. RAG poisoning involves injecting malicious texts into the knowledge database, ultimately leading to the generation of the attacker's target response (also called poisoned response). However, there are currently limited methods available for detecting such poisoning attacks. We aim to bridge the gap in this work. Particularly, we introduce RevPRAG, a flexible and automated detection pipeline that leverages the activations of LLMs for poisoned response detection. Our investigation uncovers distinct patterns in LLMs' activations when generating correct responses versus poisoned responses. Our results on multiple benchmark datasets and RAG architectures show our approach could achieve 98% true positive rate, while maintaining false positive rates close to 1%. We also evaluate recent backdoor detection methods specifically designed for LLMs and applicable for identifying poisoned responses in RAG. The results demonstrate that our approach significantly surpasses them.
Diffusion Meets Options: Hierarchical Generative Skill Composition for Temporally-Extended Tasks
Oct 03, 2024



Safe and successful deployment of robots requires not only the ability to generate complex plans but also the capacity to frequently replan and correct execution errors. This paper addresses the challenge of long-horizon trajectory planning under temporally extended objectives in a receding horizon manner. To this end, we propose DOPPLER, a data-driven hierarchical framework that generates and updates plans based on instruction specified by linear temporal logic (LTL). Our method decomposes temporal tasks into chain of options with hierarchical reinforcement learning from offline non-expert datasets. It leverages diffusion models to generate options with low-level actions. We devise a determinantal-guided posterior sampling technique during batch generation, which improves the speed and diversity of diffusion generated options, leading to more efficient querying. Experiments on robot navigation and manipulation tasks demonstrate that DOPPLER can generate sequences of trajectories that progressively satisfy the specified formulae for obstacle avoidance and sequential visitation. Demonstration videos are available online at: https://philiptheother.github.io/doppler/.
LTLDoG: Satisfying Temporally-Extended Symbolic Constraints for Safe Diffusion-based Planning
May 07, 2024



Operating effectively in complex environments while complying with specified constraints is crucial for the safe and successful deployment of robots that interact with and operate around people. In this work, we focus on generating long-horizon trajectories that adhere to novel static and temporally-extended constraints/instructions at test time. We propose a data-driven diffusion-based framework, LTLDoG, that modifies the inference steps of the reverse process given an instruction specified using finite linear temporal logic ($\text{LTL}_f$). LTLDoG leverages a satisfaction value function on $\text{LTL}_f$ and guides the sampling steps using its gradient field. This value function can also be trained to generalize to new instructions not observed during training, enabling flexible test-time adaptability. Experiments in robot navigation and manipulation illustrate that the method is able to generate trajectories that satisfy formulae that specify obstacle avoidance and visitation sequences.
Collaborative Trolley Transportation System with Autonomous Nonholonomic Robots
Apr 03, 2023
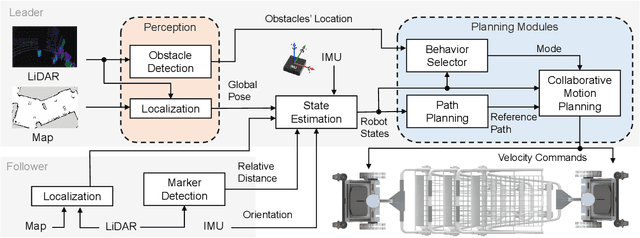
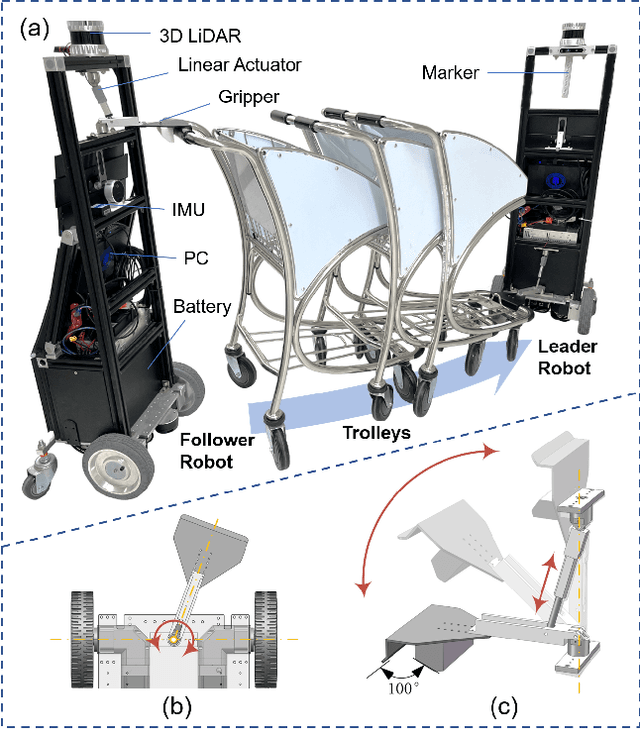
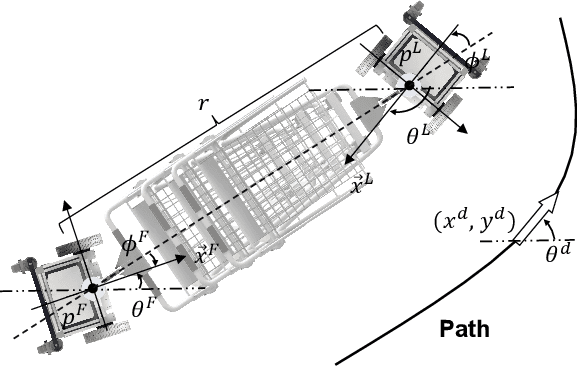
Cooperative object transportation using multiple robots has been intensively studied in the control and robotics literature, but most approaches are either only applicable to omnidirectional robots or lack a complete navigation and decision-making framework that operates in real time. This paper presents an autonomous nonholonomic multi-robot system and an end-to-end hierarchical autonomy framework for collaborative luggage trolley transportation. This framework finds kinematic-feasible paths, computes online motion plans, and provides feedback that enables the multi-robot system to handle long lines of luggage trolleys and navigate obstacles and pedestrians while dealing with multiple inherently complex and coupled constraints. We demonstrate the designed collaborative trolley transportation system through practical transportation tasks, and the experiment results reveal their effectiveness and reliability in complex and dynamic environments.
A Many-ported and Shared Memory Architecture for High-Performance ADAS SoCs
Sep 13, 2022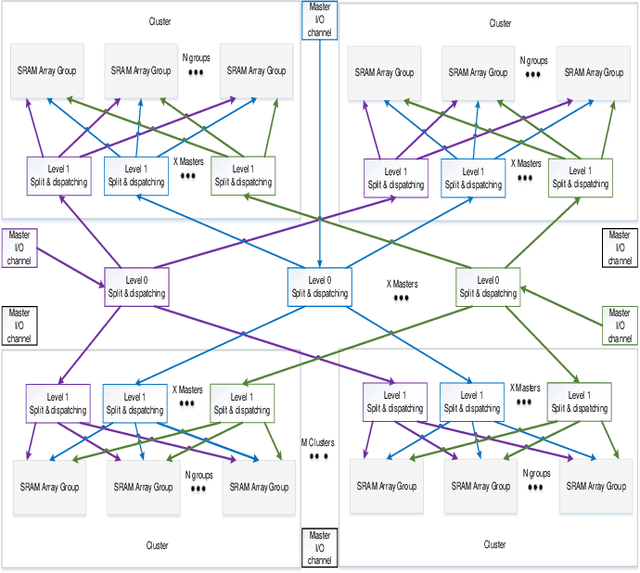
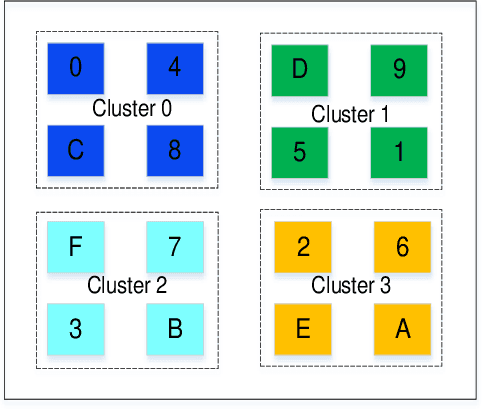
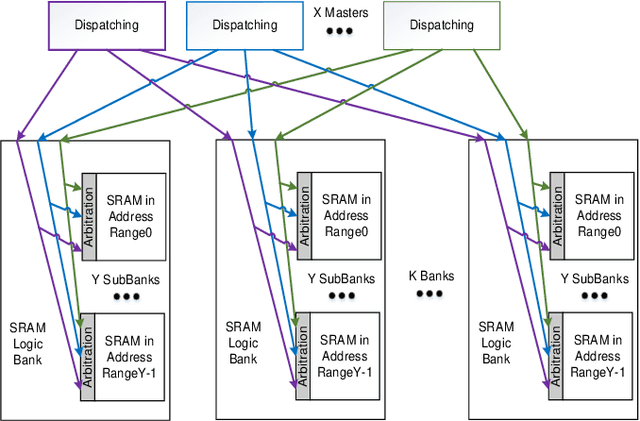
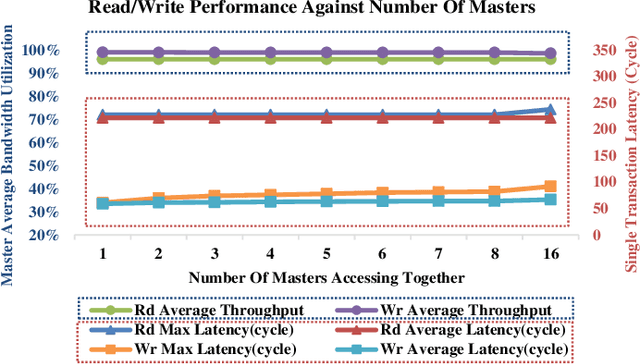
Increasing investment in computing technologies and the advancements in silicon technology has fueled rapid growth in advanced driver assistance systems (ADAS) and corresponding SoC developments. An ADAS SoC represents a heterogeneous architecture that consists of CPUs, GPUs and artificial intelligence (AI) accelerators. In order to guarantee its safety and reliability, it must process massive amount of raw data collected from multiple redundant sources such as high-definition video cameras, Radars, and Lidars to recognize objects correctly and to make the right decisions promptly. A domain specific memory architecture is essential to achieve the above goals. We present a shared memory architecture that enables high data throughput among multiple parallel accesses native to the ADAS applications. It also provides deterministic access latency with proper isolation under the stringent real-time QoS constraints. A prototype is built and analyzed. The results validate that the proposed architecture provides close to 100\% throughput for both read and write accesses generated simultaneously by many accessing masters with full injection rate. It can also provide consistent QoS to the domain specific payloads while enabling the scalability and modularity of the design.
Robotic Autonomous Trolley Collection with Progressive Perception and Nonlinear Model Predictive Control
Oct 13, 2021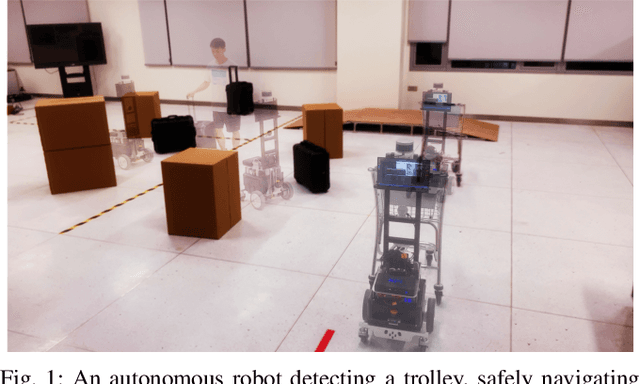
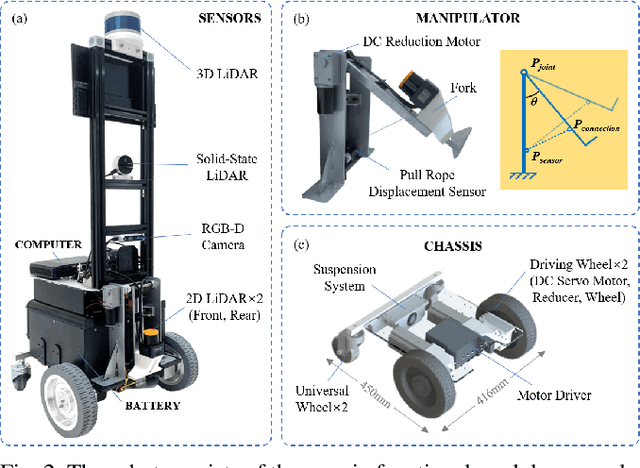
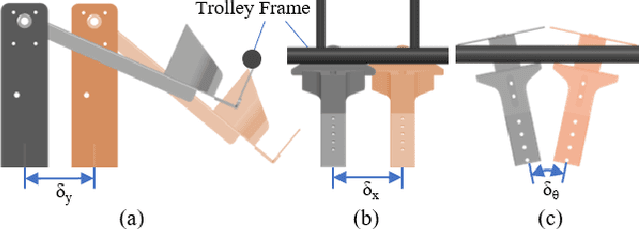
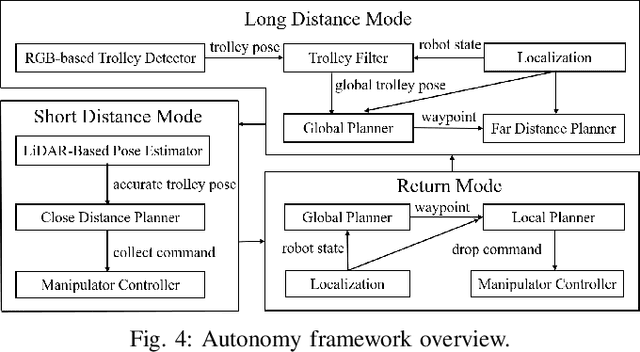
Autonomous mobile manipulation robots that can collect trolleys are widely used to liberate human resources and fight epidemics. Most prior robotic trolley collection solutions only detect trolleys with 2D poses or are merely based on specific marks and lack the formal design of planning algorithms. In this paper, we present a novel mobile manipulation system with applications in luggage trolley collection. The proposed system integrates a compact hardware design and a progressive perception and planning framework, enabling the system to efficiently and robustly collect trolleys in dynamic and complex environments. For the perception, we first develop a 3D trolley detection method that combines object detection and keypoint estimation. Then, a docking process in a short distance is achieved with an accurate point cloud plane detection method and a novel manipulator design. On the planning side, we formulate the robot's motion planning under a nonlinear model predictive control framework with control barrier functions to improve obstacle avoidance capabilities while maintaining the target in the sensors' field of view at close distances. We demonstrate our design and framework by deploying the system on actual trolley collection tasks, and their effectiveness and robustness are experimentally validated.