 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiT as Real-Time Rerenderer: Streaming Video Stylization with Autoregressive Diffusion Transformer
Apr 15, 2026Recent advances in video generation models has significantly accelerated video generation and related downstream tasks. Among these, video stylization holds important research value in areas such as immersive applications and artistic creation, attracting widespread attention. However, existing diffusion-based video stylization methods struggle to maintain stability and consistency when processing long videos, and their high computational cost and multi-step denoising make them difficult to apply in practical scenarios. In this work, we propose RTR-DiT (DiT as Real-Time Rerenderer), a steaming video stylization framework built upon Diffusion Transformer. We first fine-tune a bidirectional teacher model on a curated video stylization dataset, supporting both text-guided and reference-guided video stylization tasks, and subsequently distill it into a few-step autoregressive model via post-training with Self Forcing and Distribution Matching Distillation. Furthermore, we propose a reference-preserving KV cache update strategy that not only enables stable and consistent processing of long videos, but also supports real-time switching between text prompts and reference images. Experimental results show that RTR-DiT outperforms existing methods in both text-guided and reference-guided video stylization tasks, in terms of quantitative metrics and visual quality, and demonstrates excellent performance in real-time long video stylization and interactive style-switching applications.
Collaborative Fall Detection and Response using Wi-Fi Sensing and Mobile Companion Robot
Jul 17, 2024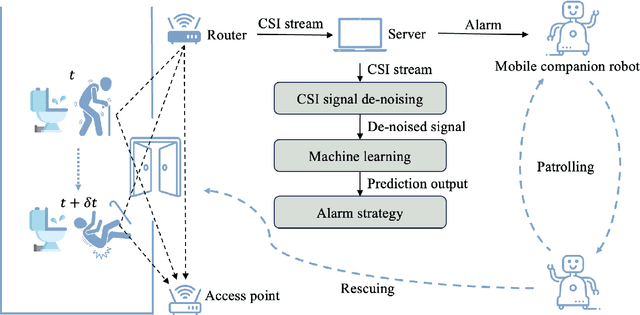
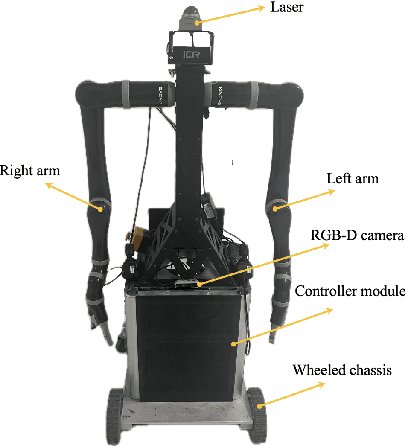
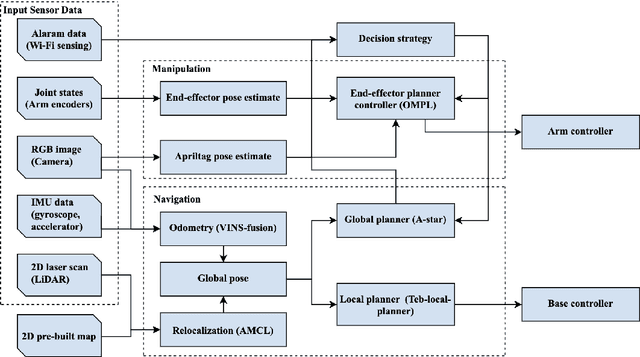
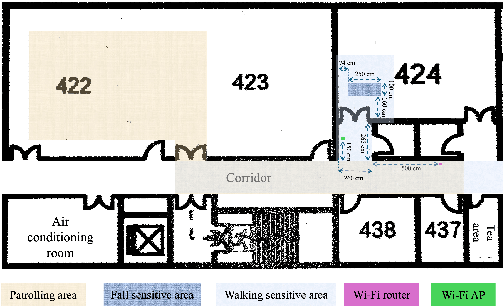
This paper presents a collaborative fall detection and response system integrating Wi-Fi sensing with robotic assistance. The proposed system leverages channel state information (CSI) disruptions caused by movements to detect falls in non-line-of-sight (NLOS) scenarios, offering non-intrusive monitoring. Besides, a companion robot is utilized to provide assistance capabilities to navigate and respond to incidents autonomously, improving efficiency in providing assistance in various environments. The experimental results demonstrate the effectiveness of the proposed system in detecting falls and responding effectively.
Model-based Transfer Learning for Automatic Optical Inspection based on domain discrepancy
Jan 14, 2023



Transfer learning is a promising method for AOI applications since it can significantly shorten sample collection time and improve efficiency in today's smart manufacturing. However, related research enhanced the network models by applying TL without considering the domain similarity among datasets, the data long-tailedness of a source dataset, and mainly used linear transformations to mitigate the lack of samples. This research applies model-based TL via domain similarity to improve the overall performance and data augmentation in both target and source domains to enrich the data quality and reduce the imbalance. Given a group of source datasets from similar industrial processes, we define which group is the most related to the target through the domain discrepancy score and the number of samples each has. Then, we transfer the chosen pre-trained backbone weights to train and fine-tune the target network. Our research suggests increases in the F1 score and the PR curve up to 20% compared with TL using benchmark datasets.
* This is a fix of the published paper "Relational-based transfer learning for automatic optical inspection based on domain discrepancy"
Robotic Autonomous Trolley Collection with Progressive Perception and Nonlinear Model Predictive Control
Oct 13, 2021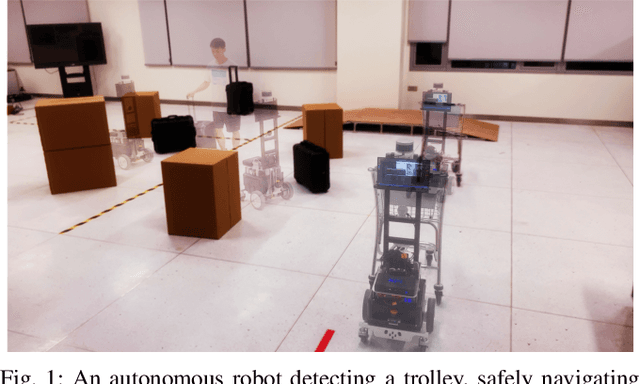
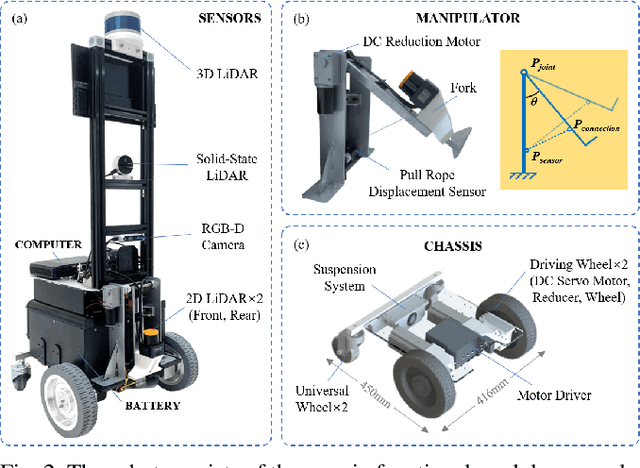
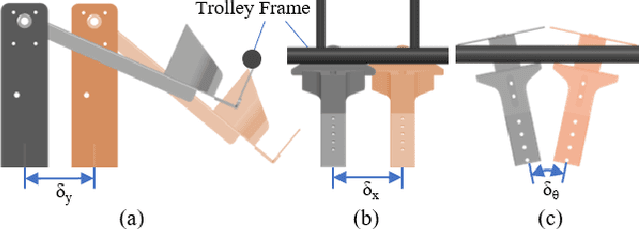
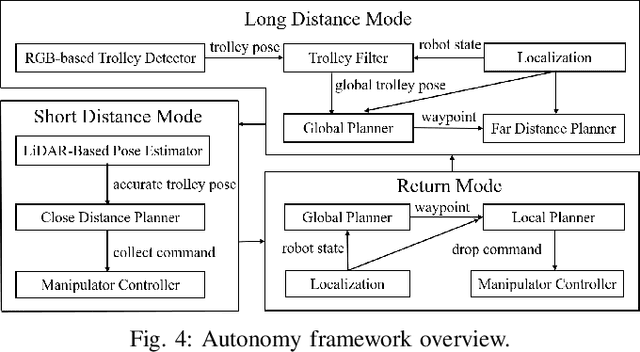
Autonomous mobile manipulation robots that can collect trolleys are widely used to liberate human resources and fight epidemics. Most prior robotic trolley collection solutions only detect trolleys with 2D poses or are merely based on specific marks and lack the formal design of planning algorithms. In this paper, we present a novel mobile manipulation system with applications in luggage trolley collection. The proposed system integrates a compact hardware design and a progressive perception and planning framework, enabling the system to efficiently and robustly collect trolleys in dynamic and complex environments. For the perception, we first develop a 3D trolley detection method that combines object detection and keypoint estimation. Then, a docking process in a short distance is achieved with an accurate point cloud plane detection method and a novel manipulator design. On the planning side, we formulate the robot's motion planning under a nonlinear model predictive control framework with control barrier functions to improve obstacle avoidance capabilities while maintaining the target in the sensors' field of view at close distances. We demonstrate our design and framework by deploying the system on actual trolley collection tasks, and their effectiveness and robustness are experimentally validated.