 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Control Barrier Function-based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot
Sep 18, 2022
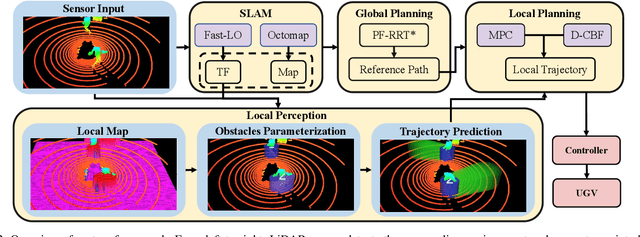
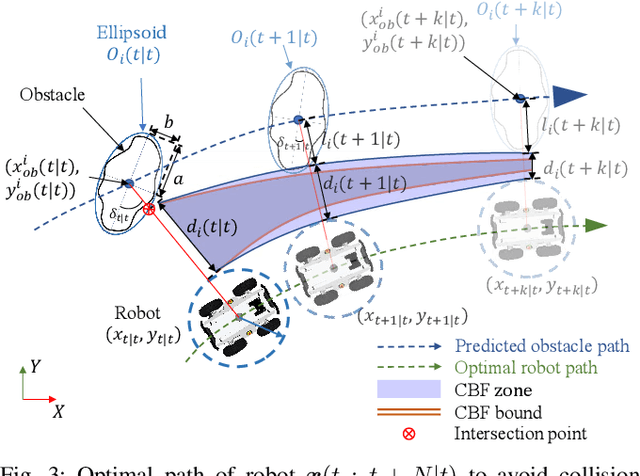
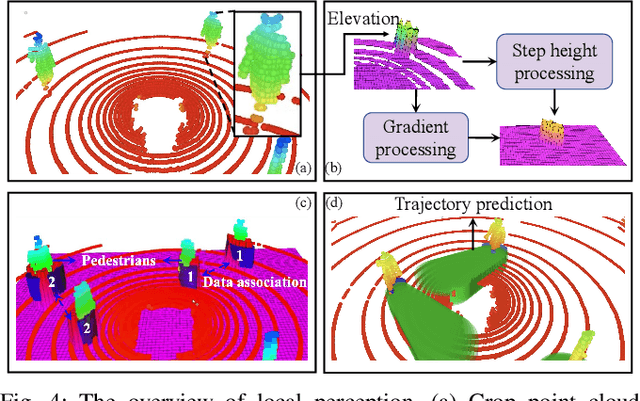
This paper presents an efficient and safe method to avoid static and dynamic obstacles based on LiDAR. First, point cloud is used to generate a real-time local grid map for obstacle detection. Then, obstacles are clustered by DBSCAN algorithm and enclosed with minimum bounding ellipses (MBEs). In addition, data association is conducted to match each MBE with the obstacle in the current frame. Considering MBE as an observation, Kalman filter (KF) is used to estimate and predict the motion state of the obstacle. In this way, the trajectory of each obstacle in the forward time domain can be parameterized as a set of ellipses. Due to the uncertainty of the MBE, the semi-major and semi-minor axes of the parameterized ellipse are extended to ensure safety. We extend the traditional Control Barrier Function (CBF) and propose Dynamic Control Barrier Function (D-CBF). We combine D-CBF with Model Predictive Control (MPC) to implement safety-critical dynamic obstacle avoidance. Experiments in simulated and real scenarios are conducted to verify the effectiveness of our algorithm. The source code is released for the reference of the community.
PUTN: A Plane-fitting based Uneven Terrain Navigation Framework
Mar 09, 2022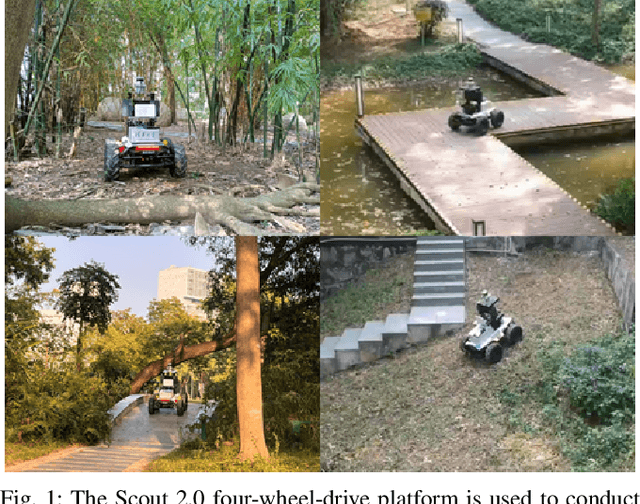
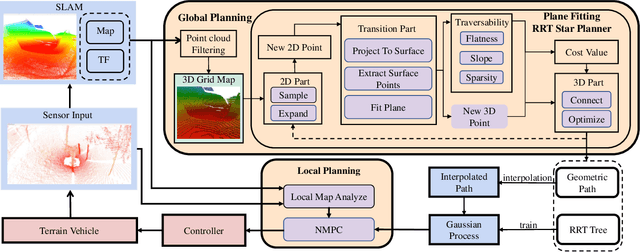
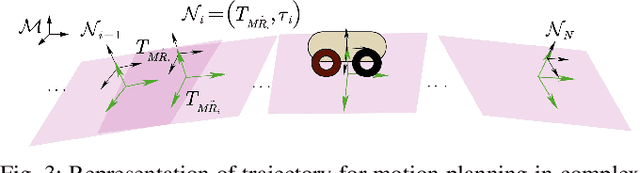
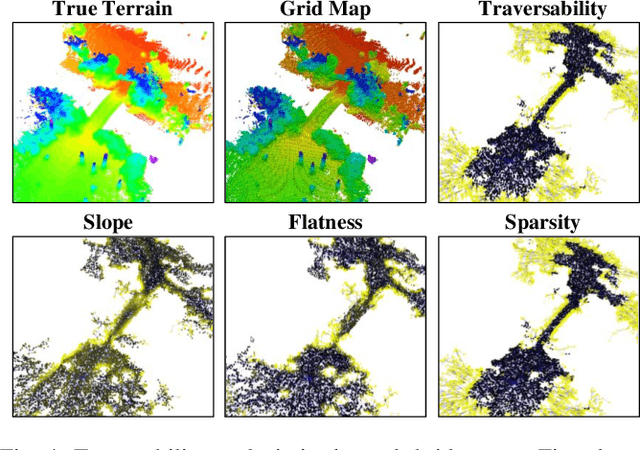
Autonomous navigation of ground robots has been widely used in indoor structured 2D environments, but there are still many challenges in outdoor 3D unstructured environments, especially in rough, uneven terrains. This paper proposed a plane-fitting based uneven terrain navigation framework (PUTN) to solve this problem. The implementation of PUTN is divided into three steps. First, based on Rapidly-exploring Random Trees (RRT), an improved sample-based algorithm called Plane Fitting RRT* (PF-RRT*) is proposed to obtain a sparse trajectory. Each sampling point corresponds to a custom traversability index and a fitted plane on the point cloud. These planes are connected in series to form a traversable strip. Second, Gaussian Process Regression is used to generate traversability of the dense trajectory interpolated from the sparse trajectory, and the sampling tree is used as the training set. Finally, local planning is performed using nonlinear model predictive control (NMPC). By adding the traversability index and uncertainty to the cost function, and adding obstacles generated by the real-time point cloud to the constraint function, a safe motion planning algorithm with smooth speed and strong robustness is available. Experiments in real scenarios are conducted to verify the effectiveness of the method.
Orientation to Pose: Continuum Robots Shape Sensing Based on Piecewise Polynomial Curvature Model
Mar 09, 2021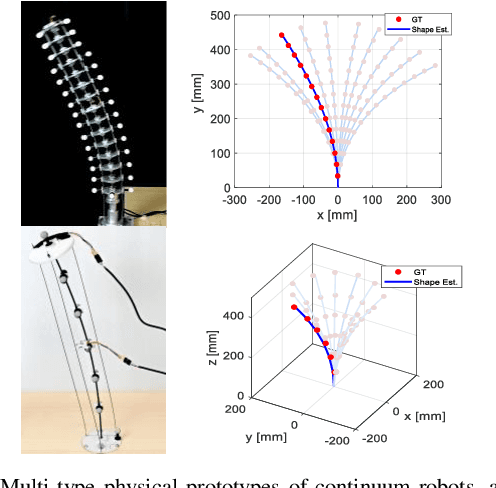
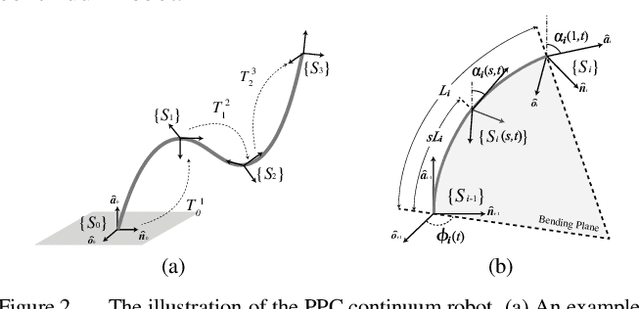
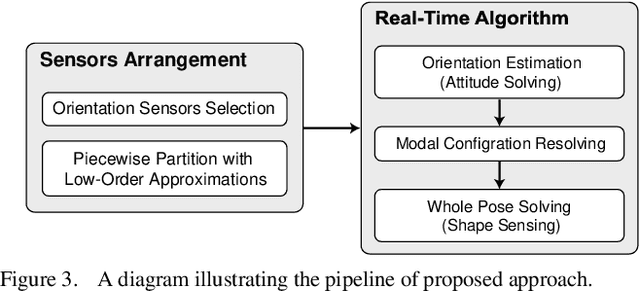
Continuum robots are typically slender and flexible with infinite freedoms in theory, which poses a challenge for their control and application. The shape sensing of continuum robots is vital to realise accuracy control. This letter proposed a novel general real-time shape sensing framework of continuum robots based on the piecewise polynomial curvature (PPC) kinematics model. We illustrate the coupling between orientation and position at any given location of the continuum robots. Further, the coupling relation could be bridged by the PPC kinematics. Therefore, we propose to estimate the shape of continuum robots through orientation estimation, using the off-the-shelf orientation sensors, e.g., IMUs, mounted on certain locations. The approach gives a valuable framework to the shape sensing of continuum robots, universality, accuracy and convenience. The accuracy of the general approach is verified in the experiments of multi-type physical prototypes.
Deep Extreme Feature Extraction: New MVA Method for Searching Particles in High Energy Physics
Mar 24, 2016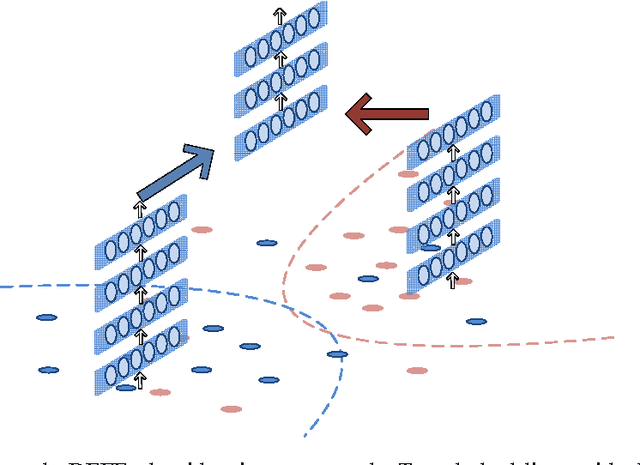
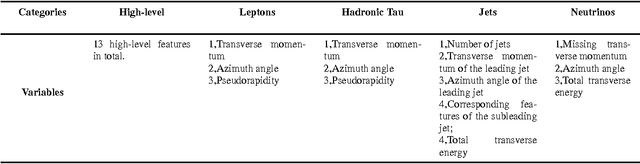
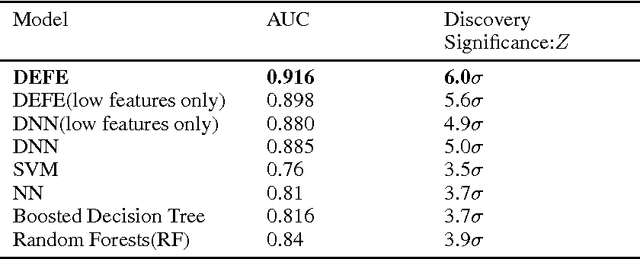
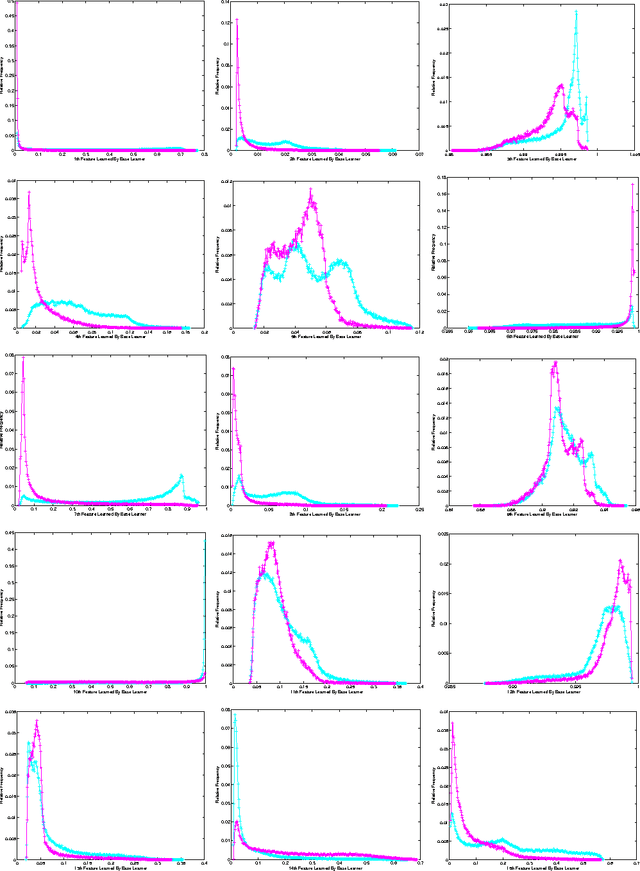
In this paper, we present Deep Extreme Feature Extraction (DEFE), a new ensemble MVA method for searching $\tau^{+}\tau^{-}$ channel of Higgs bosons in high energy physics. DEFE can be viewed as a deep ensemble learning scheme that trains a strongly diverse set of neural feature learners without explicitly encouraging diversity and penalizing correlations. This is achieved by adopting an implicit neural controller (not involved in feedforward compuation) that directly controls and distributes gradient flows from higher level deep prediction network. Such model-independent controller results in that every single local feature learned are used in the feature-to-output mapping stage, avoiding the blind averaging of features. DEFE makes the ensembles 'deep' in the sense that it allows deep post-process of these features that tries to learn to select and abstract the ensemble of neural feature learners. With the application of this model, a selection regions full of signal process can be obtained through the training of a miniature collision events set. In comparison of the Classic Deep Neural Network, DEFE shows a state-of-the-art performance: the error rate has decreased by about 37\%, the accuracy has broken through 90\% for the first time, along with the discovery significance has reached a standard deviation of 6.0 $\sigma$. Experimental data shows that, DEFE is able to train an ensemble of discriminative feature learners that boosts the overperformance of final prediction.