 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrientation to Pose: Continuum Robots Shape Sensing Based on Piecewise Polynomial Curvature Model
Mar 09, 2021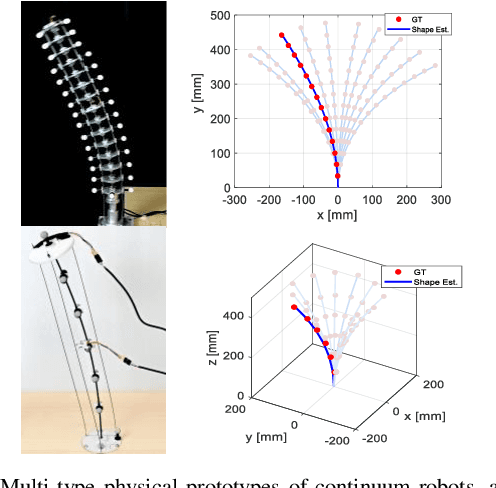
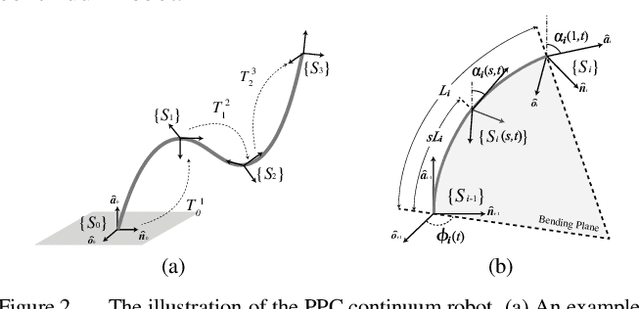
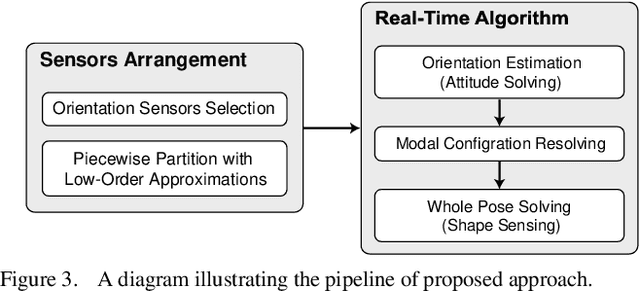
Continuum robots are typically slender and flexible with infinite freedoms in theory, which poses a challenge for their control and application. The shape sensing of continuum robots is vital to realise accuracy control. This letter proposed a novel general real-time shape sensing framework of continuum robots based on the piecewise polynomial curvature (PPC) kinematics model. We illustrate the coupling between orientation and position at any given location of the continuum robots. Further, the coupling relation could be bridged by the PPC kinematics. Therefore, we propose to estimate the shape of continuum robots through orientation estimation, using the off-the-shelf orientation sensors, e.g., IMUs, mounted on certain locations. The approach gives a valuable framework to the shape sensing of continuum robots, universality, accuracy and convenience. The accuracy of the general approach is verified in the experiments of multi-type physical prototypes.