 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-aware Planning for Quadrotor Flight in Unknown and Feature-limited Environments
Mar 19, 2025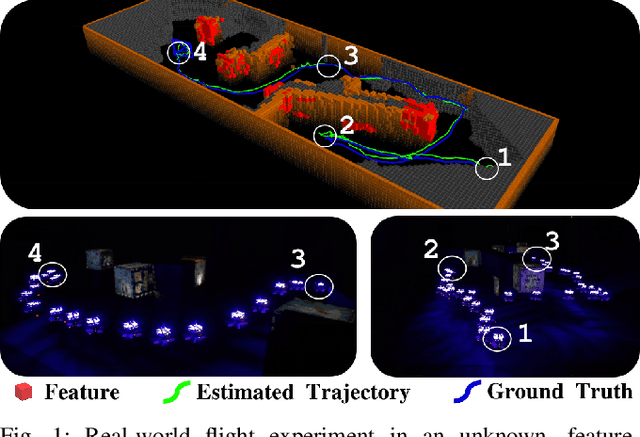
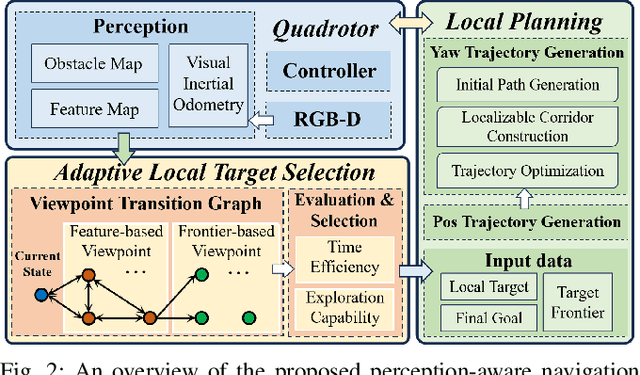
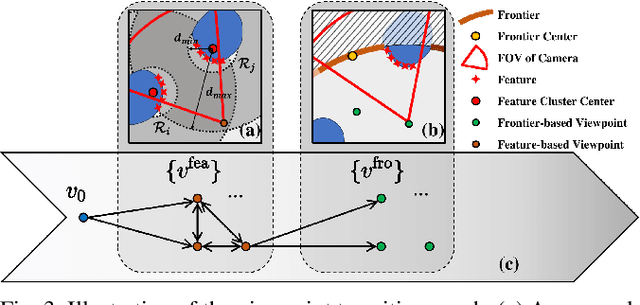
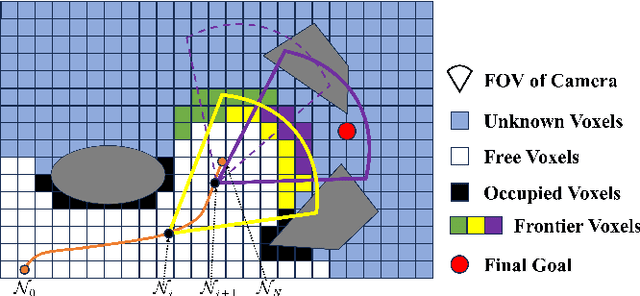
Various studies on perception-aware planning have been proposed to enhance the state estimation accuracy of quadrotors in visually degraded environments. However, many existing methods heavily rely on prior environmental knowledge and face significant limitations in previously unknown environments with sparse localization features, which greatly limits their practical application. In this paper, we present a perception-aware planning method for quadrotor flight in unknown and feature-limited environments that properly allocates perception resources among environmental information during navigation. We introduce a viewpoint transition graph that allows for the adaptive selection of local target viewpoints, which guide the quadrotor to efficiently navigate to the goal while maintaining sufficient localizability and without being trapped in feature-limited regions. During the local planning, a novel yaw trajectory generation method that simultaneously considers exploration capability and localizability is presented. It constructs a localizable corridor via feature co-visibility evaluation to ensure localization robustness in a computationally efficient way. Through validations conducted in both simulation and real-world experiments, we demonstrate the feasibility and real-time performance of the proposed method. The source code will be released to benefit the community.
Dynamic Control Barrier Function-based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot
Sep 18, 2022
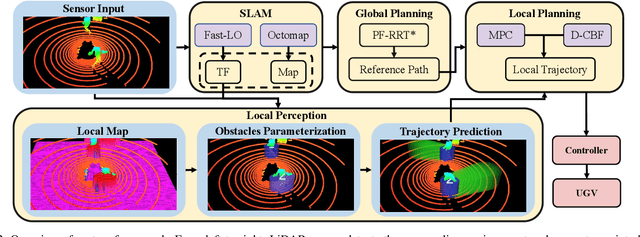
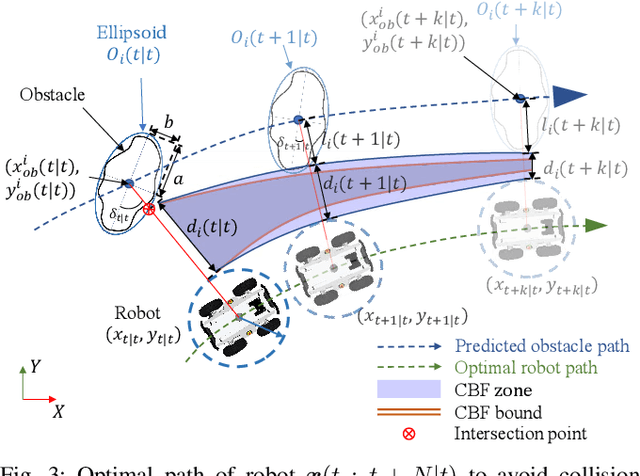
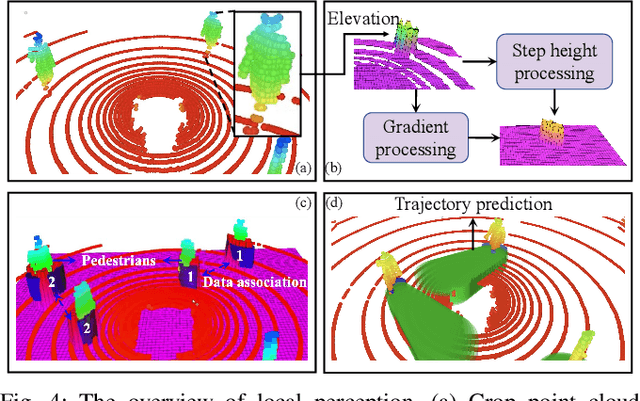
This paper presents an efficient and safe method to avoid static and dynamic obstacles based on LiDAR. First, point cloud is used to generate a real-time local grid map for obstacle detection. Then, obstacles are clustered by DBSCAN algorithm and enclosed with minimum bounding ellipses (MBEs). In addition, data association is conducted to match each MBE with the obstacle in the current frame. Considering MBE as an observation, Kalman filter (KF) is used to estimate and predict the motion state of the obstacle. In this way, the trajectory of each obstacle in the forward time domain can be parameterized as a set of ellipses. Due to the uncertainty of the MBE, the semi-major and semi-minor axes of the parameterized ellipse are extended to ensure safety. We extend the traditional Control Barrier Function (CBF) and propose Dynamic Control Barrier Function (D-CBF). We combine D-CBF with Model Predictive Control (MPC) to implement safety-critical dynamic obstacle avoidance. Experiments in simulated and real scenarios are conducted to verify the effectiveness of our algorithm. The source code is released for the reference of the community.
PUTN: A Plane-fitting based Uneven Terrain Navigation Framework
Mar 09, 2022
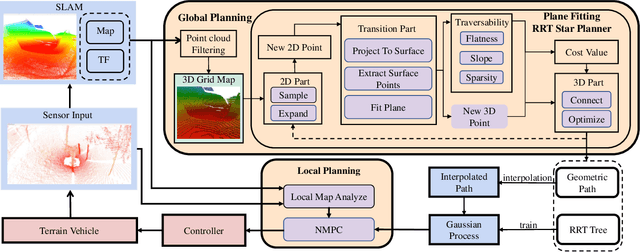
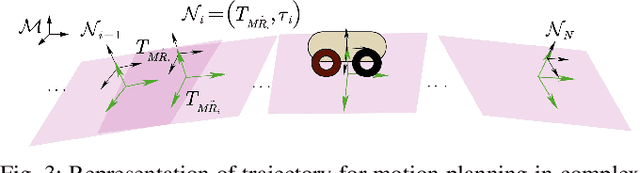
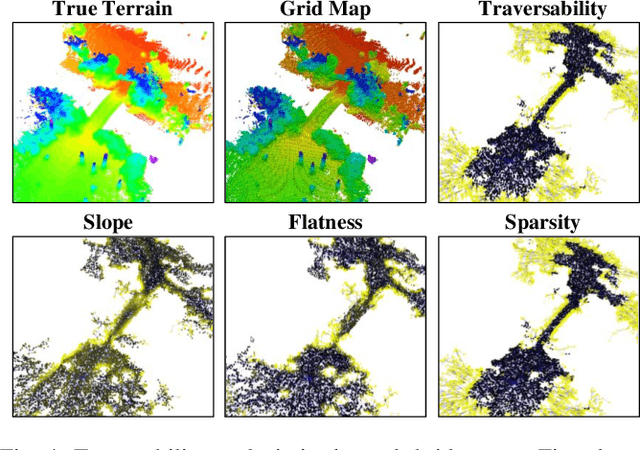
Autonomous navigation of ground robots has been widely used in indoor structured 2D environments, but there are still many challenges in outdoor 3D unstructured environments, especially in rough, uneven terrains. This paper proposed a plane-fitting based uneven terrain navigation framework (PUTN) to solve this problem. The implementation of PUTN is divided into three steps. First, based on Rapidly-exploring Random Trees (RRT), an improved sample-based algorithm called Plane Fitting RRT* (PF-RRT*) is proposed to obtain a sparse trajectory. Each sampling point corresponds to a custom traversability index and a fitted plane on the point cloud. These planes are connected in series to form a traversable strip. Second, Gaussian Process Regression is used to generate traversability of the dense trajectory interpolated from the sparse trajectory, and the sampling tree is used as the training set. Finally, local planning is performed using nonlinear model predictive control (NMPC). By adding the traversability index and uncertainty to the cost function, and adding obstacles generated by the real-time point cloud to the constraint function, a safe motion planning algorithm with smooth speed and strong robustness is available. Experiments in real scenarios are conducted to verify the effectiveness of the method.