 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePUTN: A Plane-fitting based Uneven Terrain Navigation Framework
Paper and Code
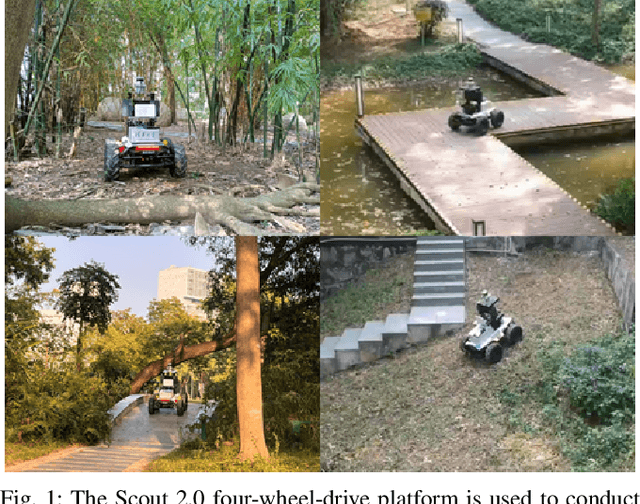
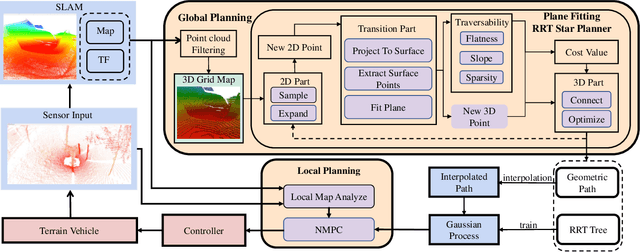
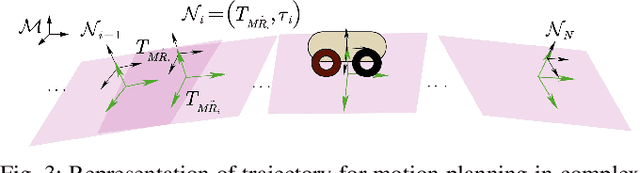
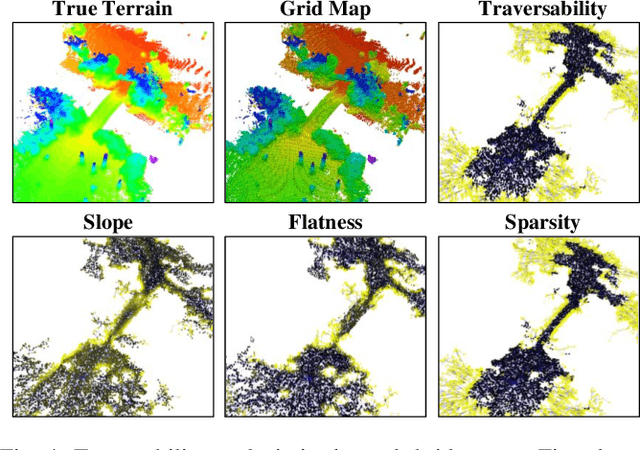
Autonomous navigation of ground robots has been widely used in indoor structured 2D environments, but there are still many challenges in outdoor 3D unstructured environments, especially in rough, uneven terrains. This paper proposed a plane-fitting based uneven terrain navigation framework (PUTN) to solve this problem. The implementation of PUTN is divided into three steps. First, based on Rapidly-exploring Random Trees (RRT), an improved sample-based algorithm called Plane Fitting RRT* (PF-RRT*) is proposed to obtain a sparse trajectory. Each sampling point corresponds to a custom traversability index and a fitted plane on the point cloud. These planes are connected in series to form a traversable strip. Second, Gaussian Process Regression is used to generate traversability of the dense trajectory interpolated from the sparse trajectory, and the sampling tree is used as the training set. Finally, local planning is performed using nonlinear model predictive control (NMPC). By adding the traversability index and uncertainty to the cost function, and adding obstacles generated by the real-time point cloud to the constraint function, a safe motion planning algorithm with smooth speed and strong robustness is available. Experiments in real scenarios are conducted to verify the effectiveness of the method.