 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputerRL: Scaling End-to-End Online Reinforcement Learning for Computer Use Agents
Aug 19, 2025We introduce ComputerRL, a framework for autonomous desktop intelligence that enables agents to operate complex digital workspaces skillfully. ComputerRL features the API-GUI paradigm, which unifies programmatic API calls and direct GUI interaction to address the inherent mismatch between machine agents and human-centric desktop environments. Scaling end-to-end RL training is crucial for improvement and generalization across diverse desktop tasks, yet remains challenging due to environmental inefficiency and instability in extended training. To support scalable and robust training, we develop a distributed RL infrastructure capable of orchestrating thousands of parallel virtual desktop environments to accelerate large-scale online RL. Furthermore, we propose Entropulse, a training strategy that alternates reinforcement learning with supervised fine-tuning, effectively mitigating entropy collapse during extended training runs. We employ ComputerRL on open models GLM-4-9B-0414 and Qwen2.5-14B, and evaluate them on the OSWorld benchmark. The AutoGLM-OS-9B based on GLM-4-9B-0414 achieves a new state-of-the-art accuracy of 48.1%, demonstrating significant improvements for general agents in desktop automation. The algorithm and framework are adopted in building AutoGLM (Liu et al., 2024a)
AndroidGen: Building an Android Language Agent under Data Scarcity
Apr 27, 2025
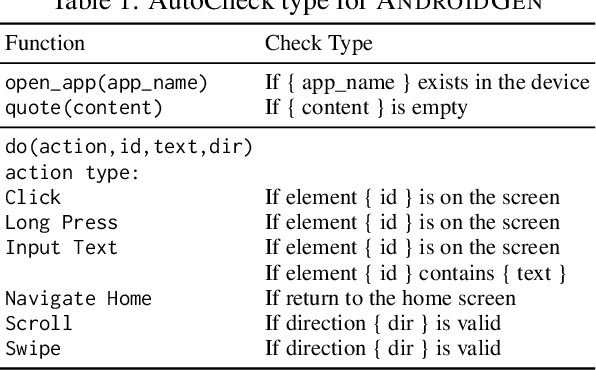
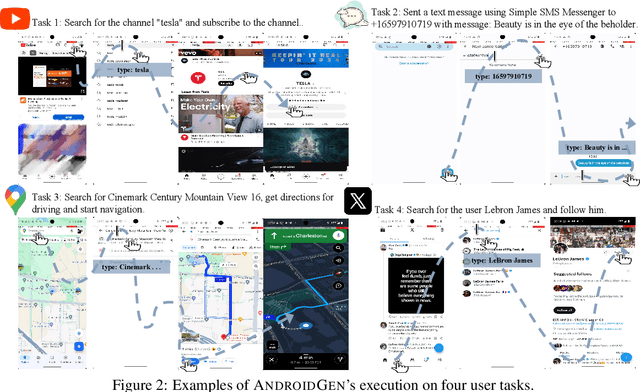
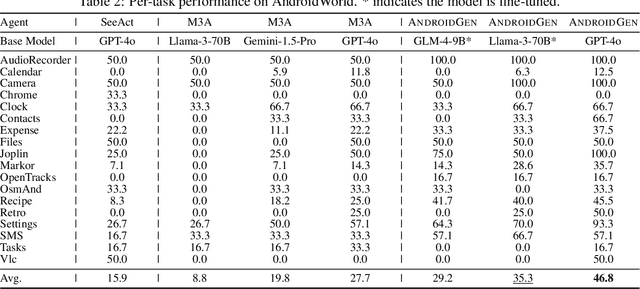
Large language models have opened up a world of possibilities for various NLP tasks, sparking optimism for the future. Despite their potential, LLMs have yet to be widely used as agents on real mobile devices. The main challenge is the need for high-quality data sources. Time constraints and labor intensity often hinder human annotation. On the other hand, existing LLMs exhibit inadequate completion rates and need a robust data filtration strategy. Given these challenges, we develop a framework called AndroidGen to enhance the capabilities of LLM-based agents under data scarcity. In addition, we leverage AndroidGen to collect trajectories given human tasks and train open-source LLMs on these trajectories to develop an open-source mobile agent without manually labeled trajectories. We extensively evaluate AndroidGen with AndroidWorld, AitW, and various popular applications, demonstrating its improvements and revealing potential areas for future improvement. Code, model, and data are available at https://github.com/THUDM/AndroidGen.
WebRL: Training LLM Web Agents via Self-Evolving Online Curriculum Reinforcement Learning
Nov 04, 2024



Large language models (LLMs) have shown remarkable potential as autonomous agents, particularly in web-based tasks. However, existing LLM web agents heavily rely on expensive proprietary LLM APIs, while open LLMs lack the necessary decision-making capabilities. This paper introduces WebRL, a self-evolving online curriculum reinforcement learning framework designed to train high-performance web agents using open LLMs. WebRL addresses three key challenges in building LLM web agents, including the scarcity of training tasks, sparse feedback signals, and policy distribution drift in online learning. Specifically, WebRL incorporates 1) a self-evolving curriculum that generates new tasks from unsuccessful attempts, 2) a robust outcome-supervised reward model (ORM), and 3) adaptive reinforcement learning strategies to ensure consistent improvements. We apply WebRL to transform open Llama-3.1 and GLM-4 models into proficient web agents. On WebArena-Lite, WebRL improves the success rate of Llama-3.1-8B from 4.8% to 42.4%, and from 6.1% to 43% for GLM-4-9B. These open models significantly surpass the performance of GPT-4-Turbo (17.6%) and GPT-4o (13.9%) and outperform previous state-of-the-art web agents trained on open LLMs (AutoWebGLM, 18.2%). Our findings demonstrate WebRL's effectiveness in bridging the gap between open and proprietary LLM-based web agents, paving the way for more accessible and powerful autonomous web interaction systems.
AndroidLab: Training and Systematic Benchmarking of Android Autonomous Agents
Oct 31, 2024



Autonomous agents have become increasingly important for interacting with the real world. Android agents, in particular, have been recently a frequently-mentioned interaction method. However, existing studies for training and evaluating Android agents lack systematic research on both open-source and closed-source models. In this work, we propose AndroidLab as a systematic Android agent framework. It includes an operation environment with different modalities, action space, and a reproducible benchmark. It supports both large language models (LLMs) and multimodal models (LMMs) in the same action space. AndroidLab benchmark includes predefined Android virtual devices and 138 tasks across nine apps built on these devices. By using the AndroidLab environment, we develop an Android Instruction dataset and train six open-source LLMs and LMMs, lifting the average success rates from 4.59\% to 21.50\% for LLMs and from 1.93\% to 13.28\% for LMMs. AndroidLab is open-sourced and publicly available at \url{https://github.com/THUDM/Android-Lab}.
AutoGLM: Autonomous Foundation Agents for GUIs
Oct 28, 2024



We present AutoGLM, a new series in the ChatGLM family, designed to serve as foundation agents for autonomous control of digital devices through Graphical User Interfaces (GUIs). While foundation models excel at acquiring human knowledge, they often struggle with decision-making in dynamic real-world environments, limiting their progress toward artificial general intelligence. This limitation underscores the importance of developing foundation agents capable of learning through autonomous environmental interactions by reinforcing existing models. Focusing on Web Browser and Phone as representative GUI scenarios, we have developed AutoGLM as a practical foundation agent system for real-world GUI interactions. Our approach integrates a comprehensive suite of techniques and infrastructures to create deployable agent systems suitable for user delivery. Through this development, we have derived two key insights: First, the design of an appropriate "intermediate interface" for GUI control is crucial, enabling the separation of planning and grounding behaviors, which require distinct optimization for flexibility and accuracy respectively. Second, we have developed a novel progressive training framework that enables self-evolving online curriculum reinforcement learning for AutoGLM. Our evaluations demonstrate AutoGLM's effectiveness across multiple domains. For web browsing, AutoGLM achieves a 55.2% success rate on VAB-WebArena-Lite (improving to 59.1% with a second attempt) and 96.2% on OpenTable evaluation tasks. In Android device control, AutoGLM attains a 36.2% success rate on AndroidLab (VAB-Mobile) and 89.7% on common tasks in popular Chinese APPs.
VisualAgentBench: Towards Large Multimodal Models as Visual Foundation Agents
Aug 12, 2024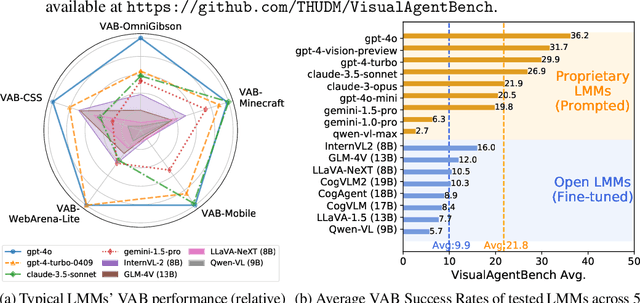
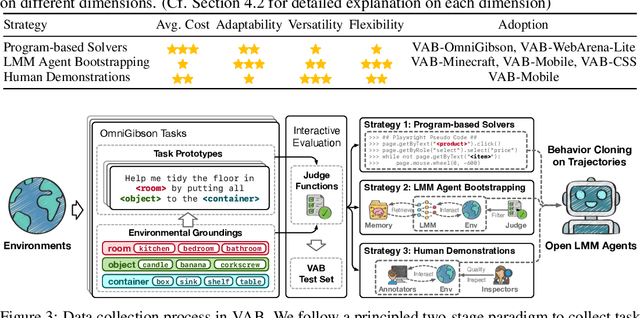
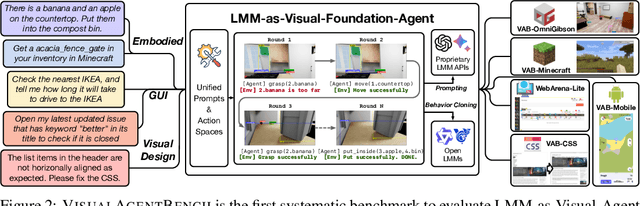
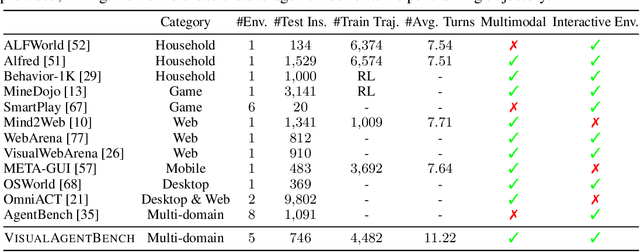
Large Multimodal Models (LMMs) have ushered in a new era in artificial intelligence, merging capabilities in both language and vision to form highly capable Visual Foundation Agents. These agents are postulated to excel across a myriad of tasks, potentially approaching general artificial intelligence. However, existing benchmarks fail to sufficiently challenge or showcase the full potential of LMMs in complex, real-world environments. To address this gap, we introduce VisualAgentBench (VAB), a comprehensive and pioneering benchmark specifically designed to train and evaluate LMMs as visual foundation agents across diverse scenarios, including Embodied, Graphical User Interface, and Visual Design, with tasks formulated to probe the depth of LMMs' understanding and interaction capabilities. Through rigorous testing across nine proprietary LMM APIs and eight open models, we demonstrate the considerable yet still developing agent capabilities of these models. Additionally, VAB constructs a trajectory training set constructed through hybrid methods including Program-based Solvers, LMM Agent Bootstrapping, and Human Demonstrations, promoting substantial performance improvements in LMMs through behavior cloning. Our work not only aims to benchmark existing models but also provides a solid foundation for future development into visual foundation agents. Code, train \& test data, and part of fine-tuned open LMMs are available at \url{https://github.com/THUDM/VisualAgentBench}.
ChatGLM: A Family of Large Language Models from GLM-130B to GLM-4 All Tools
Jun 18, 2024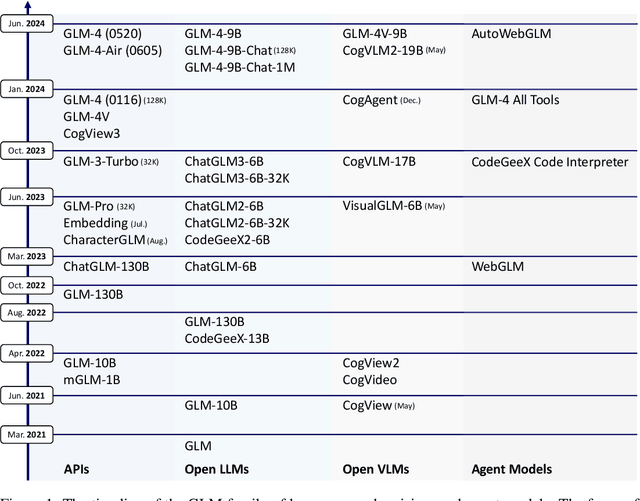
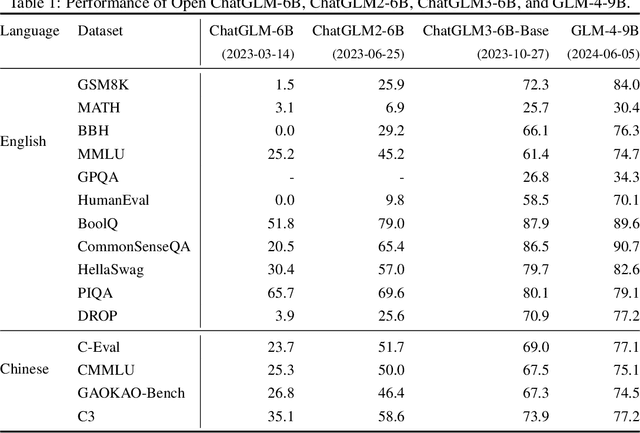
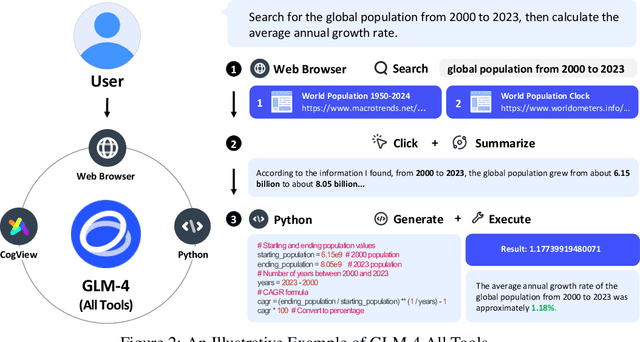
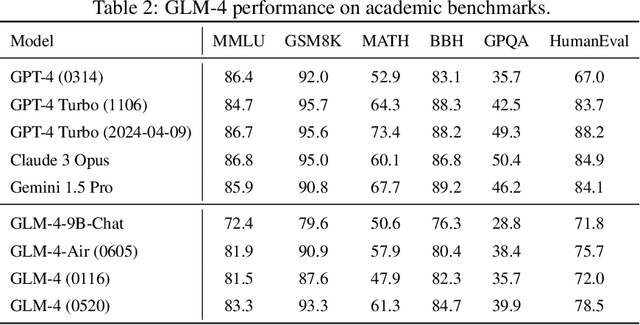
We introduce ChatGLM, an evolving family of large language models that we have been developing over time. This report primarily focuses on the GLM-4 language series, which includes GLM-4, GLM-4-Air, and GLM-4-9B. They represent our most capable models that are trained with all the insights and lessons gained from the preceding three generations of ChatGLM. To date, the GLM-4 models are pre-trained on ten trillions of tokens mostly in Chinese and English, along with a small set of corpus from 24 languages, and aligned primarily for Chinese and English usage. The high-quality alignment is achieved via a multi-stage post-training process, which involves supervised fine-tuning and learning from human feedback. Evaluations show that GLM-4 1) closely rivals or outperforms GPT-4 in terms of general metrics such as MMLU, GSM8K, MATH, BBH, GPQA, and HumanEval, 2) gets close to GPT-4-Turbo in instruction following as measured by IFEval, 3) matches GPT-4 Turbo (128K) and Claude 3 for long context tasks, and 4) outperforms GPT-4 in Chinese alignments as measured by AlignBench. The GLM-4 All Tools model is further aligned to understand user intent and autonomously decide when and which tool(s) touse -- including web browser, Python interpreter, text-to-image model, and user-defined functions -- to effectively complete complex tasks. In practical applications, it matches and even surpasses GPT-4 All Tools in tasks like accessing online information via web browsing and solving math problems using Python interpreter. Over the course, we have open-sourced a series of models, including ChatGLM-6B (three generations), GLM-4-9B (128K, 1M), GLM-4V-9B, WebGLM, and CodeGeeX, attracting over 10 million downloads on Hugging face in the year 2023 alone. The open models can be accessed through https://github.com/THUDM and https://huggingface.co/THUDM.
AutoWebGLM: Bootstrap And Reinforce A Large Language Model-based Web Navigating Agent
Apr 04, 2024

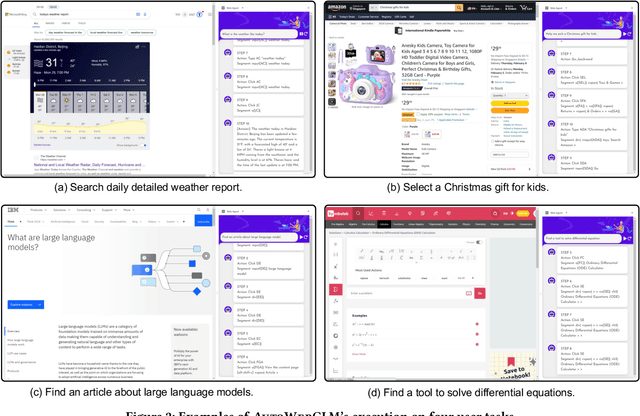
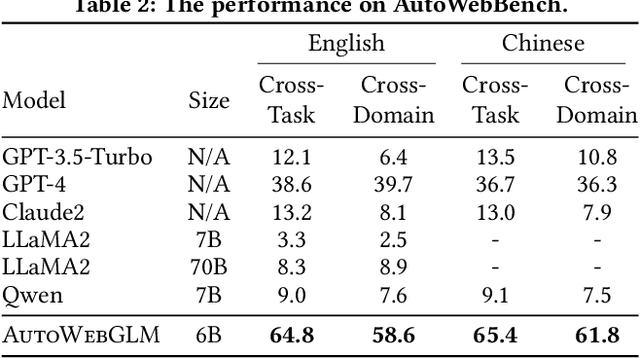
Large language models (LLMs) have fueled many intelligent agent tasks, such as web navigation -- but most existing agents perform far from satisfying in real-world webpages due to three factors: (1) the versatility of actions on webpages, (2) HTML text exceeding model processing capacity, and (3) the complexity of decision-making due to the open-domain nature of web. In light of the challenge, we develop AutoWebGLM, a GPT-4-outperforming automated web navigation agent built upon ChatGLM3-6B. Inspired by human browsing patterns, we design an HTML simplification algorithm to represent webpages, preserving vital information succinctly. We employ a hybrid human-AI method to build web browsing data for curriculum training. Then, we bootstrap the model by reinforcement learning and rejection sampling to further facilitate webpage comprehension, browser operations, and efficient task decomposition by itself. For testing, we establish a bilingual benchmark -- AutoWebBench -- for real-world web browsing tasks. We evaluate AutoWebGLM across diverse web navigation benchmarks, revealing its improvements but also underlying challenges to tackle real environments. Related code, model, and data will be released at \url{https://github.com/THUDM/AutoWebGLM}.
TeacherLM: Teaching to Fish Rather Than Giving the Fish, Language Modeling Likewise
Oct 31, 2023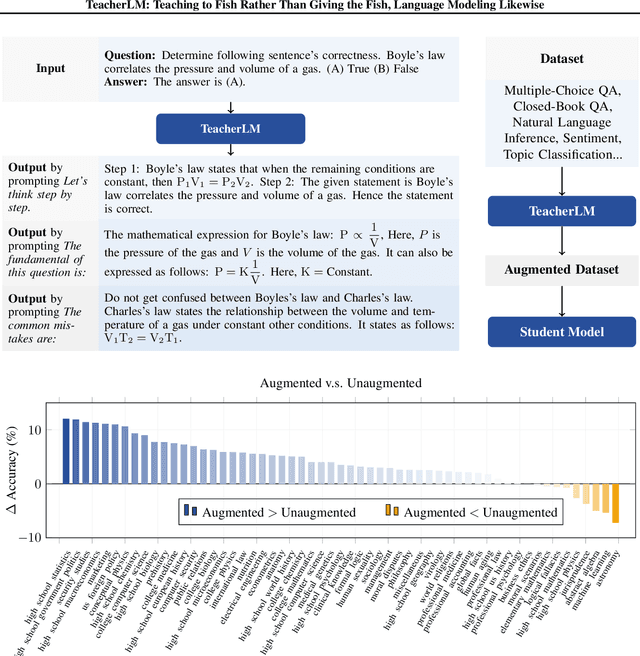
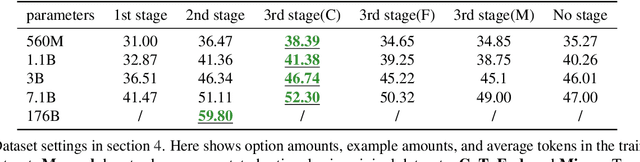
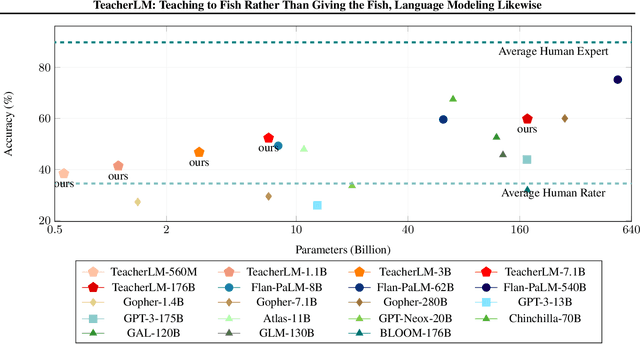

Large Language Models (LLMs) exhibit impressive reasoning and data augmentation capabilities in various NLP tasks. However, what about small models? In this work, we propose TeacherLM-7.1B, capable of annotating relevant fundamentals, chain of thought, and common mistakes for most NLP samples, which makes annotation more than just an answer, thus allowing other models to learn "why" instead of just "what". The TeacherLM-7.1B model achieved a zero-shot score of 52.3 on MMLU, surpassing most models with over 100B parameters. Even more remarkable is its data augmentation ability. Based on TeacherLM-7.1B, we augmented 58 NLP datasets and taught various student models with different parameters from OPT and BLOOM series in a multi-task setting. The experimental results indicate that the data augmentation provided by TeacherLM has brought significant benefits. We will release the TeacherLM series of models and augmented datasets as open-source.
AgentBench: Evaluating LLMs as Agents
Aug 07, 2023



Large Language Models (LLMs) are becoming increasingly smart and autonomous, targeting real-world pragmatic missions beyond traditional NLP tasks. As a result, there has been an urgent need to evaluate LLMs as agents on challenging tasks in interactive environments. We present AgentBench, a multi-dimensional evolving benchmark that currently consists of 8 distinct environments to assess LLM-as-Agent's reasoning and decision-making abilities in a multi-turn open-ended generation setting. Our extensive test over 25 LLMs (including APIs and open-sourced models) shows that, while top commercial LLMs present a strong ability of acting as agents in complex environments, there is a significant disparity in performance between them and open-sourced competitors. It also serves as a component of an ongoing project with wider coverage and deeper consideration towards systematic LLM evaluation. Datasets, environments, and an integrated evaluation package for AgentBench are released at https://github.com/THUDM/AgentBench