 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoSketch: A Neural-Symbolic Approach to Geometric Multimodal Reasoning with Auxiliary Line Construction and Affine Transformation
Sep 26, 2025Geometric Problem Solving (GPS) poses a unique challenge for Multimodal Large Language Models (MLLMs), requiring not only the joint interpretation of text and diagrams but also iterative visuospatial reasoning. While existing approaches process diagrams as static images, they lack the capacity for dynamic manipulation - a core aspect of human geometric reasoning involving auxiliary line construction and affine transformations. We present GeoSketch, a neural-symbolic framework that recasts geometric reasoning as an interactive perception-reasoning-action loop. GeoSketch integrates: (1) a Perception module that abstracts diagrams into structured logic forms, (2) a Symbolic Reasoning module that applies geometric theorems to decide the next deductive step, and (3) a Sketch Action module that executes operations such as drawing auxiliary lines or applying transformations, thereby updating the diagram in a closed loop. To train this agent, we develop a two-stage pipeline: supervised fine-tuning on 2,000 symbolic-curated trajectories followed by reinforcement learning with dense, symbolic rewards to enhance robustness and strategic exploration. To evaluate this paradigm, we introduce the GeoSketch Benchmark, a high-quality set of 390 geometry problems requiring auxiliary construction or affine transformations. Experiments on strong MLLM baselines demonstrate that GeoSketch significantly improves stepwise reasoning accuracy and problem-solving success over static perception methods. By unifying hierarchical decision-making, executable visual actions, and symbolic verification, GeoSketch advances multimodal reasoning from static interpretation to dynamic, verifiable interaction, establishing a new foundation for solving complex visuospatial problems.
Emulating Human-like Adaptive Vision for Efficient and Flexible Machine Visual Perception
Sep 18, 2025Human vision is highly adaptive, efficiently sampling intricate environments by sequentially fixating on task-relevant regions. In contrast, prevailing machine vision models passively process entire scenes at once, resulting in excessive resource demands scaling with spatial-temporal input resolution and model size, yielding critical limitations impeding both future advancements and real-world application. Here we introduce AdaptiveNN, a general framework aiming to drive a paradigm shift from 'passive' to 'active, adaptive' vision models. AdaptiveNN formulates visual perception as a coarse-to-fine sequential decision-making process, progressively identifying and attending to regions pertinent to the task, incrementally combining information across fixations, and actively concluding observation when sufficient. We establish a theory integrating representation learning with self-rewarding reinforcement learning, enabling end-to-end training of the non-differentiable AdaptiveNN without additional supervision on fixation locations. We assess AdaptiveNN on 17 benchmarks spanning 9 tasks, including large-scale visual recognition, fine-grained discrimination, visual search, processing images from real driving and medical scenarios, language-driven embodied AI, and side-by-side comparisons with humans. AdaptiveNN achieves up to 28x inference cost reduction without sacrificing accuracy, flexibly adapts to varying task demands and resource budgets without retraining, and provides enhanced interpretability via its fixation patterns, demonstrating a promising avenue toward efficient, flexible, and interpretable computer vision. Furthermore, AdaptiveNN exhibits closely human-like perceptual behaviors in many cases, revealing its potential as a valuable tool for investigating visual cognition. Code is available at https://github.com/LeapLabTHU/AdaptiveNN.
GLM-4.5: Agentic, Reasoning, and Coding (ARC) Foundation Models
Aug 08, 2025We present GLM-4.5, an open-source Mixture-of-Experts (MoE) large language model with 355B total parameters and 32B activated parameters, featuring a hybrid reasoning method that supports both thinking and direct response modes. Through multi-stage training on 23T tokens and comprehensive post-training with expert model iteration and reinforcement learning, GLM-4.5 achieves strong performance across agentic, reasoning, and coding (ARC) tasks, scoring 70.1% on TAU-Bench, 91.0% on AIME 24, and 64.2% on SWE-bench Verified. With much fewer parameters than several competitors, GLM-4.5 ranks 3rd overall among all evaluated models and 2nd on agentic benchmarks. We release both GLM-4.5 (355B parameters) and a compact version, GLM-4.5-Air (106B parameters), to advance research in reasoning and agentic AI systems. Code, models, and more information are available at https://github.com/zai-org/GLM-4.5.
MV-Debate: Multi-view Agent Debate with Dynamic Reflection Gating for Multimodal Harmful Content Detection in Social Media
Aug 07, 2025Social media has evolved into a complex multimodal environment where text, images, and other signals interact to shape nuanced meanings, often concealing harmful intent. Identifying such intent, whether sarcasm, hate speech, or misinformation, remains challenging due to cross-modal contradictions, rapid cultural shifts, and subtle pragmatic cues. To address these challenges, we propose MV-Debate, a multi-view agent debate framework with dynamic reflection gating for unified multimodal harmful content detection. MV-Debate assembles four complementary debate agents, a surface analyst, a deep reasoner, a modality contrast, and a social contextualist, to analyze content from diverse interpretive perspectives. Through iterative debate and reflection, the agents refine responses under a reflection-gain criterion, ensuring both accuracy and efficiency. Experiments on three benchmark datasets demonstrate that MV-Debate significantly outperforms strong single-model and existing multi-agent debate baselines. This work highlights the promise of multi-agent debate in advancing reliable social intent detection in safety-critical online contexts.
TreeRL: LLM Reinforcement Learning with On-Policy Tree Search
Jun 13, 2025Reinforcement learning (RL) with tree search has demonstrated superior performance in traditional reasoning tasks. Compared to conventional independent chain sampling strategies with outcome supervision, tree search enables better exploration of the reasoning space and provides dense, on-policy process rewards during RL training but remains under-explored in On-Policy LLM RL. We propose TreeRL, a reinforcement learning framework that directly incorporates on-policy tree search for RL training. Our approach includes intermediate supervision and eliminates the need for a separate reward model training. Existing approaches typically train a separate process reward model, which can suffer from distribution mismatch and reward hacking. We also introduce a cost-effective tree search approach that achieves higher search efficiency under the same generation token budget by strategically branching from high-uncertainty intermediate steps rather than using random branching. Experiments on challenging math and code reasoning benchmarks demonstrate that TreeRL achieves superior performance compared to traditional ChainRL, highlighting the potential of tree search for LLM. TreeRL is open-sourced at https://github.com/THUDM/TreeRL.
Does Reinforcement Learning Really Incentivize Reasoning Capacity in LLMs Beyond the Base Model?
Apr 18, 2025Reinforcement Learning with Verifiable Rewards (RLVR) has recently demonstrated notable success in enhancing the reasoning capabilities of LLMs, particularly in mathematics and programming tasks. It is widely believed that RLVR enables LLMs to continuously self-improve, thus acquiring novel reasoning abilities that exceed corresponding base models' capacity. In this study, however, we critically re-examines this assumption by measuring the pass@\textit{k} metric with large values of \textit{k} to explore the reasoning capability boundary of the models across a wide range of model families and benchmarks. Surprisingly, the RL does \emph{not}, in fact, elicit fundamentally new reasoning patterns. While RL-trained models outperform their base models at smaller values of $k$ (\eg, $k$=1), base models can achieve a comparable or even higher pass@$k$ score compared to their RL counterparts at large $k$ values. The reasoning paths generated by RL-trained models are already included in the base models' sampling distribution, suggesting that most reasoning abilities manifested in RL-trained models are already obtained by base models. Further analysis shows that RL training boosts the performance by biasing the model's output distribution toward paths that are more likely to yield rewards, therefore sampling correct responses more efficiently. But this also results in a narrower reasoning capability boundary compared to base models. Similar results are observed in visual reasoning tasks trained with RLVR. Moreover, we find that distillation can genuinely introduce new knowledge into the model, different from RLVR. These findings underscore a critical limitation of RLVR in advancing LLM reasoning abilities which requires us to fundamentally rethink the impact of RL training in reasoning LLMs and the need of a better paradigm. Project Page: https://limit-of-RLVR.github.io
Towards Understanding Text Hallucination of Diffusion Models via Local Generation Bias
Mar 05, 2025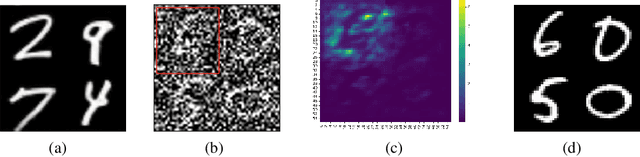
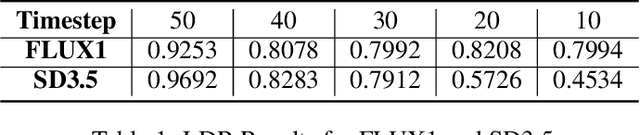

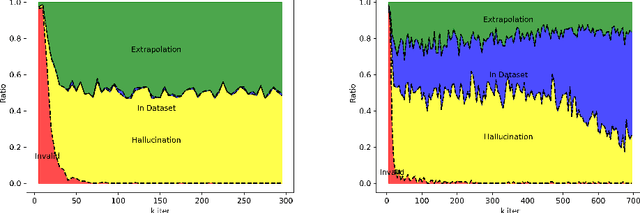
Score-based diffusion models have achieved incredible performance in generating realistic images, audio, and video data. While these models produce high-quality samples with impressive details, they often introduce unrealistic artifacts, such as distorted fingers or hallucinated texts with no meaning. This paper focuses on textual hallucinations, where diffusion models correctly generate individual symbols but assemble them in a nonsensical manner. Through experimental probing, we consistently observe that such phenomenon is attributed it to the network's local generation bias. Denoising networks tend to produce outputs that rely heavily on highly correlated local regions, particularly when different dimensions of the data distribution are nearly pairwise independent. This behavior leads to a generation process that decomposes the global distribution into separate, independent distributions for each symbol, ultimately failing to capture the global structure, including underlying grammar. Intriguingly, this bias persists across various denoising network architectures including MLP and transformers which have the structure to model global dependency. These findings also provide insights into understanding other types of hallucinations, extending beyond text, as a result of implicit biases in the denoising models. Additionally, we theoretically analyze the training dynamics for a specific case involving a two-layer MLP learning parity points on a hypercube, offering an explanation of its underlying mechanism.
VVRec: Reconstruction Attacks on DL-based Volumetric Video Upstreaming via Latent Diffusion Model with Gamma Distribution
Feb 25, 2025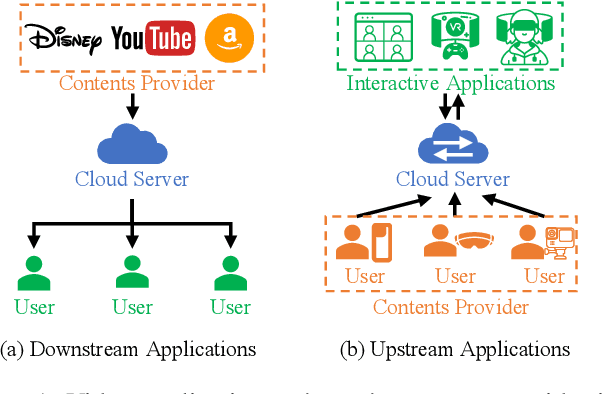
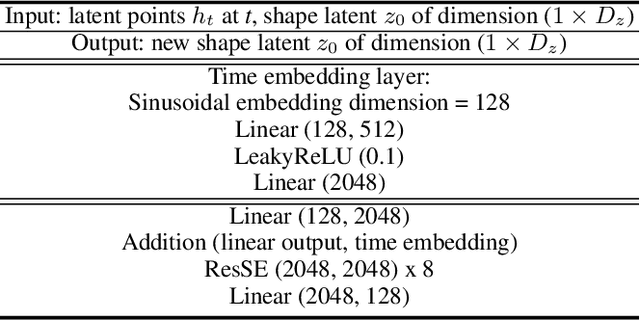
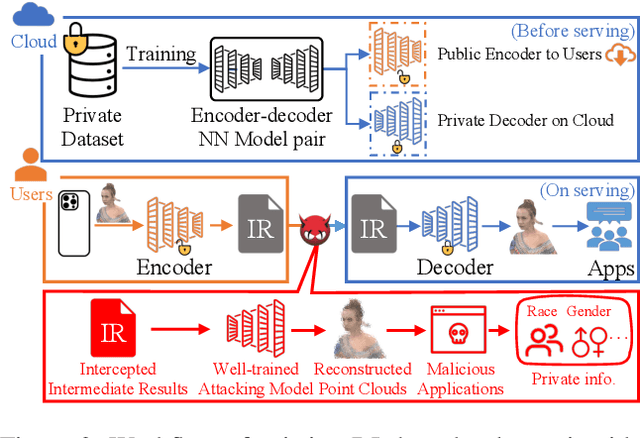
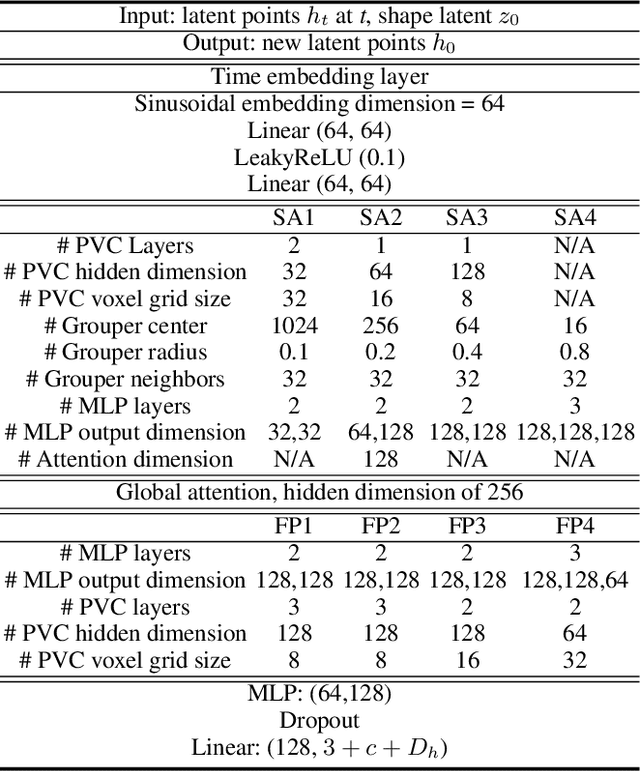
With the popularity of 3D volumetric video applications, such as Autonomous Driving, Virtual Reality, and Mixed Reality, current developers have turned to deep learning for compressing volumetric video frames, i.e., point clouds for video upstreaming. The latest deep learning-based solutions offer higher efficiency, lower distortion, and better hardware support compared to traditional ones like MPEG and JPEG. However, privacy threats arise, especially reconstruction attacks targeting to recover the original input point cloud from the intermediate results. In this paper, we design VVRec, to the best of our knowledge, which is the first targeting DL-based Volumetric Video Reconstruction attack scheme. VVRec demonstrates the ability to reconstruct high-quality point clouds from intercepted transmission intermediate results using four well-trained neural network modules we design. Leveraging the latest latent diffusion models with Gamma distribution and a refinement algorithm, VVRec excels in reconstruction quality, color recovery, and surpasses existing defenses. We evaluate VVRec using three volumetric video datasets. The results demonstrate that VVRec achieves 64.70dB reconstruction accuracy, with an impressive 46.39% reduction of distortion over baselines.
Advancing Language Model Reasoning through Reinforcement Learning and Inference Scaling
Jan 20, 2025



Large language models (LLMs) have demonstrated remarkable capabilities in complex reasoning tasks. However, existing approaches mainly rely on imitation learning and struggle to achieve effective test-time scaling. While reinforcement learning (RL) holds promise for enabling self-exploration and learning from feedback, recent attempts yield only modest improvements in complex reasoning. In this paper, we present T1 to scale RL by encouraging exploration and understand inference scaling. We first initialize the LLM using synthesized chain-of-thought data that integrates trial-and-error and self-verification. To scale RL training, we promote increased sampling diversity through oversampling. We further employ an entropy bonus as an auxiliary loss, alongside a dynamic anchor for regularization to facilitate reward optimization. We demonstrate that T1 with open LLMs as its base exhibits inference scaling behavior and achieves superior performance on challenging math reasoning benchmarks. For example, T1 with Qwen2.5-32B as the base model outperforms the recent Qwen QwQ-32B-Preview model on MATH500, AIME2024, and Omni-math-500. More importantly, we present a simple strategy to examine inference scaling, where increased inference budgets directly lead to T1's better performance without any additional verification. We will open-source the T1 models and the data used to train them at \url{https://github.com/THUDM/T1}.
The Essence of Contextual Understanding in Theory of Mind: A Study on Question Answering with Story Characters
Jan 03, 2025



Theory-of-Mind (ToM) is a fundamental psychological capability that allows humans to understand and interpret the mental states of others. Humans infer others' thoughts by integrating causal cues and indirect clues from broad contextual information, often derived from past interactions. In other words, human ToM heavily relies on the understanding about the backgrounds and life stories of others. Unfortunately, this aspect is largely overlooked in existing benchmarks for evaluating machines' ToM capabilities, due to their usage of short narratives without global backgrounds. In this paper, we verify the importance of understanding long personal backgrounds in ToM and assess the performance of LLMs in such realistic evaluation scenarios. To achieve this, we introduce a novel benchmark, CharToM-QA, comprising 1,035 ToM questions based on characters from classic novels. Our human study reveals a significant disparity in performance: the same group of educated participants performs dramatically better when they have read the novels compared to when they have not. In parallel, our experiments on state-of-the-art LLMs, including the very recent o1 model, show that LLMs still perform notably worse than humans, despite that they have seen these stories during pre-training. This highlights the limitations of current LLMs in capturing the nuanced contextual information required for ToM reasoning.